









汇聚层(池化层)
本节将介绍汇聚(pooling)层(又名池化层),它具有双重目的:
1.降低卷积层对位置的敏感性
2.同时降低对空间降采样表示的敏感性。
最大汇聚层和平均汇聚层
简单地讲, 最大汇聚层就是找到窗口内的最大值Max, 平均汇聚层就是找到窗口内的平均值Avg。
与卷积层类似,汇聚层运算符由一个固定形状的窗口组成,该窗口根据其步幅大小在输入的所有区域上滑动,为固定形状窗口(有时称为汇聚窗口)遍历的每个位置计算一个输出。 然而,不同于卷积层中的输入与卷积核之间的互相关计算,汇聚层不包含参数。相反,池运算是确定性的,我们通常计算汇聚窗口中所有元素的最大值或平均值。这些操作分别称为最大汇聚层(maximum pooling)和平均汇聚层(average pooling)。
在这两种情况下,与互相关运算符一样,汇聚窗口从输入张量的左上角开始,从左往右、从上往下的在输入张量内滑动。在汇聚窗口到达的每个位置,它计算该窗口中输入子张量的最大值或平均值。计算最大值或平均值是取决于使用了最大汇聚层还是平均汇聚层。
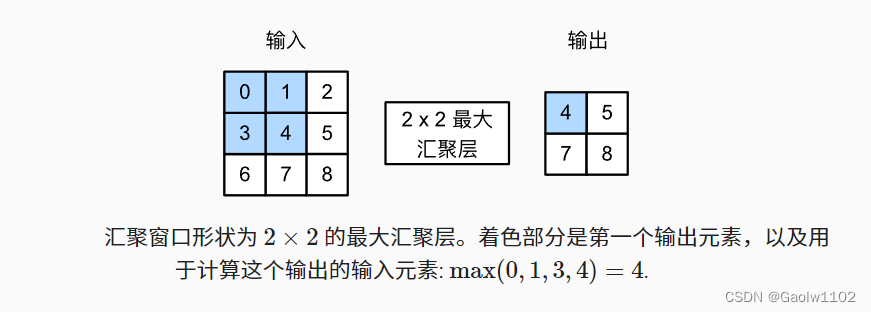
上图中输出张量的高度为 2 2 2 ,宽度为 2 2 2 。这四个元素为每个汇聚窗口中的最大值:
m a x ( 0 , 1 , 3 , 4 ) = 4 , m a x ( 1 , 2 , 4 , 5 ) = 5 , m a x ( 3 , 4 , 6 , 7 ) = 7 , m a x ( 4 , 5 , 7 , 8 ) = 8. max(0,1,3,4) = 4, \\ max(1,2,4,5) = 5, \\ max(3,4,6,7) = 7, \\ max(4,5,7,8) = 8. \\ max(0,1,3,4)=4,max(1,2,4,5)=5,max(3,4,6,7)=7,max(4,5,7,8)=8.
汇聚窗口形状为 p × q p \times q p×q 的汇聚层称为 p × q p \times q p×q 汇聚层,汇聚操作称为 p × q p \times q p×q 汇聚。
现在我们将使用卷积层的输出作为 2 × 2 2 \times 2 2×2 最大汇聚的输入。 设置卷积层输入为X,汇聚层输出为Y。 无论 X[i, j] 和 X[i, j + 1] 的值相同与否,或 X[i, j + 1] 和 X[i, j + 2] 的值相同与否,汇聚层始终输出 Y[i, j] = 1。 也就是说,使用 2 × 2 2 \times 2 2×2 最大汇聚层,即使在高度或宽度上移动一个元素,卷积层仍然可以识别到模式。
在下面的代码中的pool2d函数,我们实现汇聚层的前向传播。这类似前面的corr2d函数。 然而,这里我们没有卷积核,输出为输入中每个区域的最大值或平均值。
import torch
from torch import nn
from d2l import torch as d2l
#定义池化层函数
def pool2d(X, pool_size, mode='max'):
p_h, p_w = pool_size
Y = torch.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
if mode == 'max':
Y[i, j] = X[i: i + p_h, j: j + p_w].max()
elif mode == 'avg':
Y[i, j] = X[i: i + p_h, j: j + p_w].mean()
return Y
我们可以构建上图的输入张量X,验证二维最大汇聚层的输出。
X = torch.tensor([[0.0,1.0,2.0], [3.0,4.0,5.0], [6.0,7.0,8.0]])
pool_res = pool2d(X, (2, 2))
pool_res
tensor([[4., 5.],
[7., 8.]])
此外,我们还可以验证平均汇聚层。
pool2d(X, (2,2), 'avg')
tensor([[2., 3.],
[5., 6.]])
填充和步幅
与卷积层一样,汇聚层也可以改变输出形状。
和以前一样,我们可以通过填充和步幅以获得所需的输出形状。 下面,我们用深度学习框架中内置的二维最大汇聚层,来演示汇聚层中填充和步幅的使用。
我们首先构造了一个输入张量X,它有四个维度,其中样本数和通道数都是1。
X = torch.arange(16, dtype=torch.float32).reshape((1, 1, 4, 4))
X
tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]]]])
默认情况下,深度学习框架中的步幅与汇聚窗口的大小相同。 因此,如果我们使用形状为(3, 3)的汇聚窗口,那么默认情况下,我们得到的步幅形状为(3, 3)。
pool2d = nn.MaxPool2d(3)
pool2d(X)
tensor([[[[10.]]]])
填充和步幅可以手动设定。
pool2d = nn.MaxPool2d(3, padding=1, stride=2)
pool2d(X)
tensor([[[[ 5., 7.],
[13., 15.]]]])
当然,我们可以设定一个任意大小的矩形汇聚窗口,并分别设定填充和步幅的高度和宽度。
pool2d = nn.MaxPool2d((2, 3), stride=(2, 3), padding=(0, 1))
pool2d(X)
tensor([[[[ 5., 7.],
[13., 15.]]]])
多个通道
在处理多通道输入数据时,汇聚层在每个输入通道上单独运算,而不是像卷积层一样在通道上对输入进行汇总。 这意味着汇聚层的输出通道数与输入通道数相同。 下面,我们将在通道维度上连结张量X和X + 1,以构建具有2个通道的输入。
X = torch.cat((X, X+1), 1) #1代表扩展每一行, 0代表扩展每一列
X, X.shape
(tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]],
[[ 1., 2., 3., 4.],
[ 5., 6., 7., 8.],
[ 9., 10., 11., 12.],
[13., 14., 15., 16.]]]]),
torch.Size([1, 2, 4, 4]))
如下所示,汇聚后输出通道的数量仍然是2。
pool2d = nn.MaxPool2d(3, padding=1, stride=2)
pool2d(X)
tensor([[[[ 5., 7.],
[13., 15.]],
[[ 6., 8.],
[14., 16.]]]])
小结
1、对于给定输入元素,最大汇聚层会输出该窗口内的最大值,平均汇聚层会输出该窗口内的平均值。
2、汇聚层的主要优点之一是减轻卷积层对位置的过度敏感。
3、我们可以指定汇聚层的填充和步幅。
4、使用最大汇聚层以及大于1的步幅,可减少空间维度(如高度和宽度)。
5、汇聚层的输出通道数与输入通道数相同。
















 9875
9875











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











