







KITTI数据集转为LVI-SAM使用格式
KITTI数据集介绍
下载:
真值:Download odometry ground truth poses (4 MB)
标定参数(以及时间戳):Download odometry data set (calibration files, 1 MB)
真值
标定参数
raw data
下载有gt的raw data:
下载参考链接地址
raw data与真值之间的对应关系
| 真值 | raw data |
|---|---|
| 00 | 2011_10_03_0027 |
| 01 | 2011_10_03_0042 |
| 02 | 2011_10_03_0034 |
| 03 | 2011_09_26_0067 |
| 04 | 2011_09_30_0016 |
| 05 | 2011_09_30_0018 |
| 06 | 2011_09_30_0020 |
| 07 | 2011_09_30_0027 |
| 08 | 2011_09_30_0028 |
| 09 | 2011_09_30_0033 |
| 10 | 2011_09_30_0034 |
KITTI数据集转为bag
LIO-SAM中有config/doc/kitti2bag.py的工具文件,可以获得100Hz的IMU数据
*_extract.zip 包含的IMU数据是100Hz, 但是视觉的数据没有去畸变,激光数据以txt格式存储的,转换为bag格式耗时长。
*_sync.zip数据中的IMU是10Hz, 但视觉数据已经去畸变,并且视觉和激光的时间戳已经同步,激光数据的存储格式是二进制格式bin存储的。
原文链接:https://blog.csdn.net/weixin_47552638/article/details/129759500
可参考链接
示例代码
cd data
wget https://s3.eu-central-1.amazonaws.com/avg-kitti/raw_data/2011_09_26_drive_0084/2011_09_26_drive_0084_sync.zip
wget https://s3.eu-central-1.amazonaws.com/avg-kitti/raw_data/2011_09_26_drive_0084/2011_09_26_drive_0084_extract.zip
wget https://s3.eu-central-1.amazonaws.com/avg-kitti/raw_data/2011_09_26_calib.zip
unzip 2011_09_26_drive_0084_sync.zip
unzip 2011_09_26_drive_0084_extract.zip
unzip 2011_09_26_calib.zip
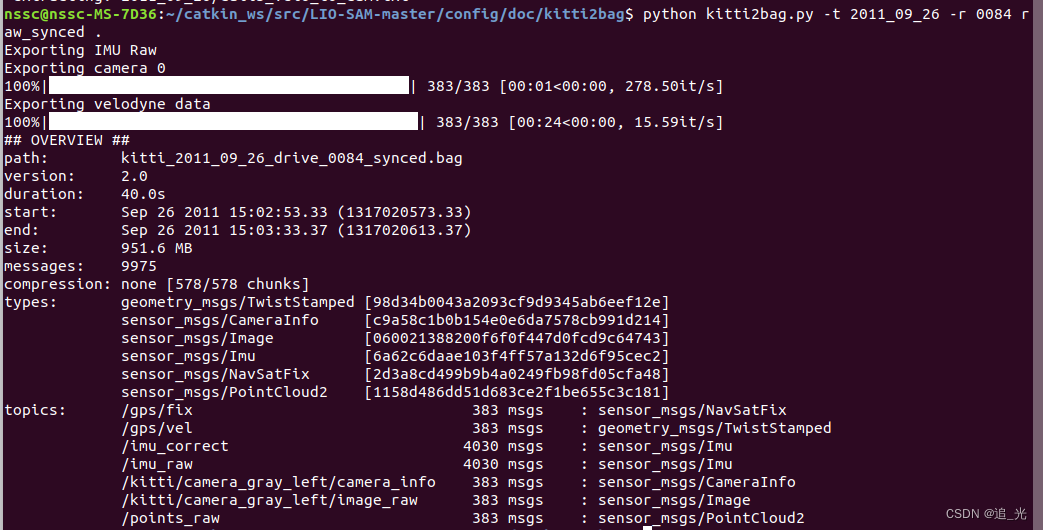
python kitti2bag.py -t 2011_09_26 -r 0084 raw_synced .
会在对应data文件夹下生成bag文件
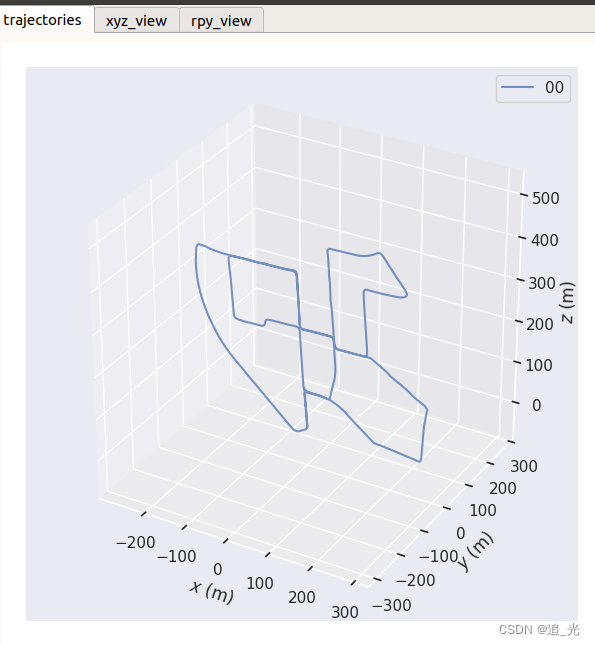
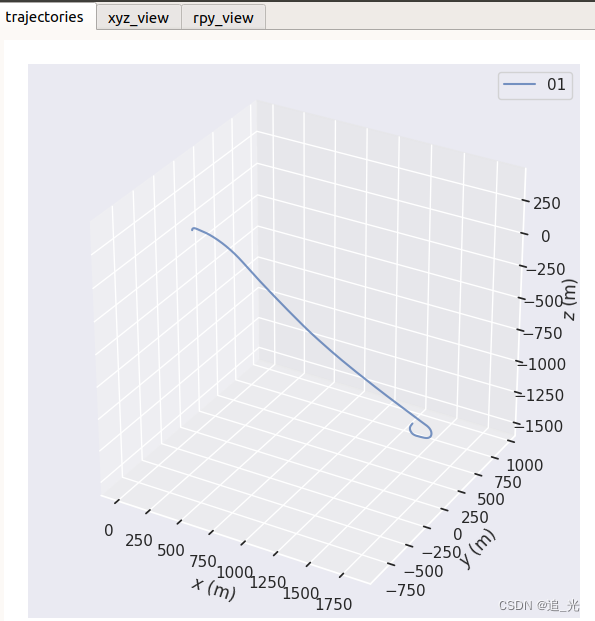
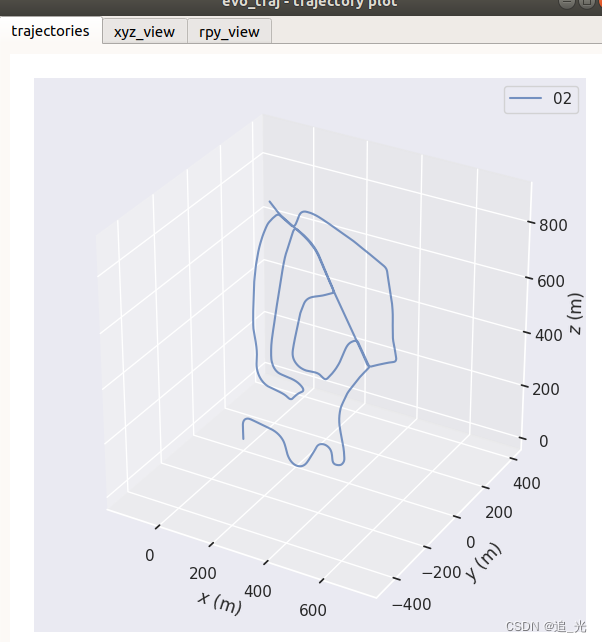
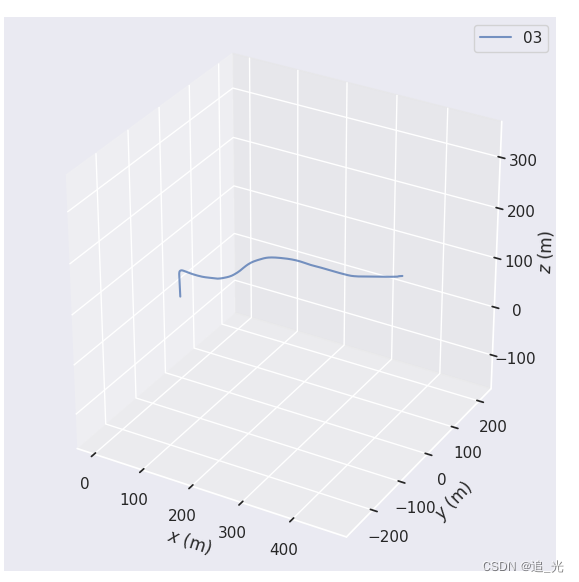
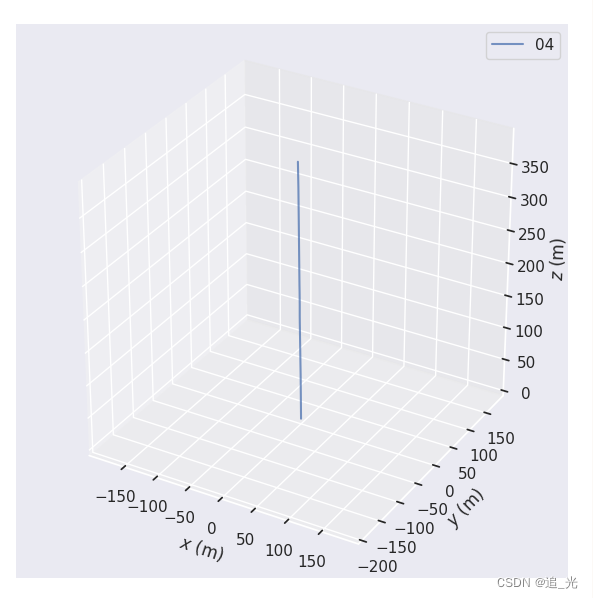
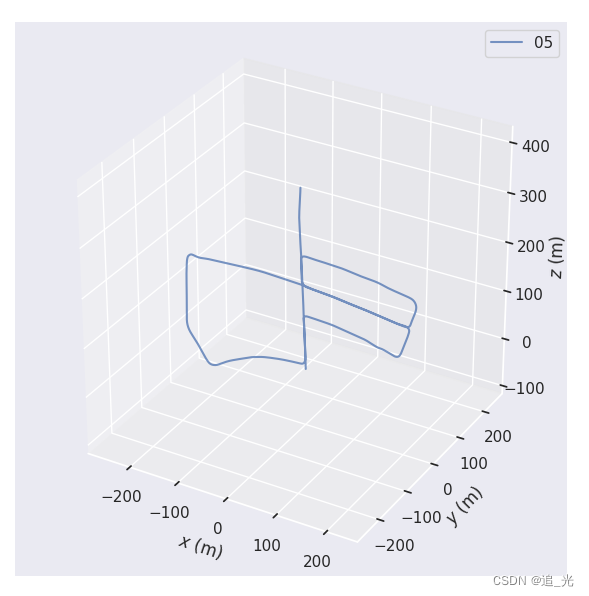
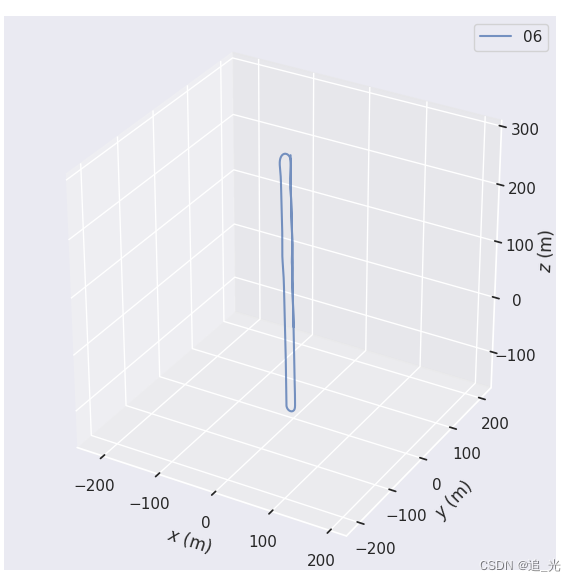
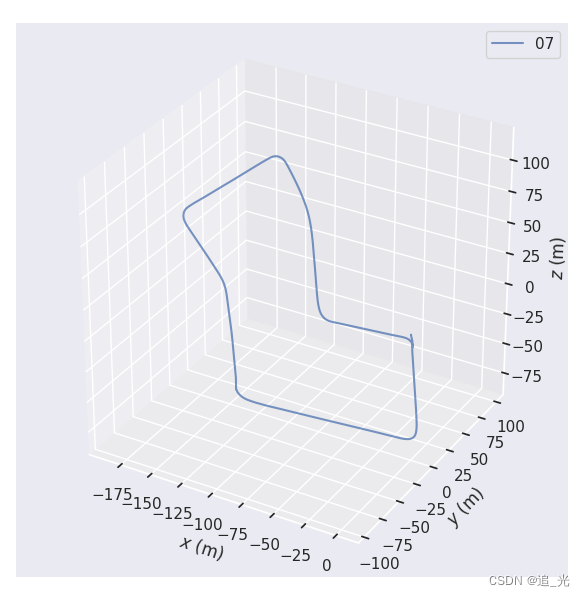
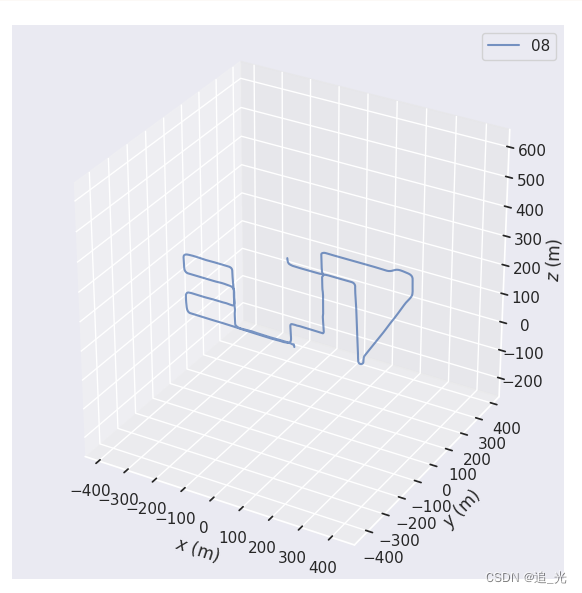
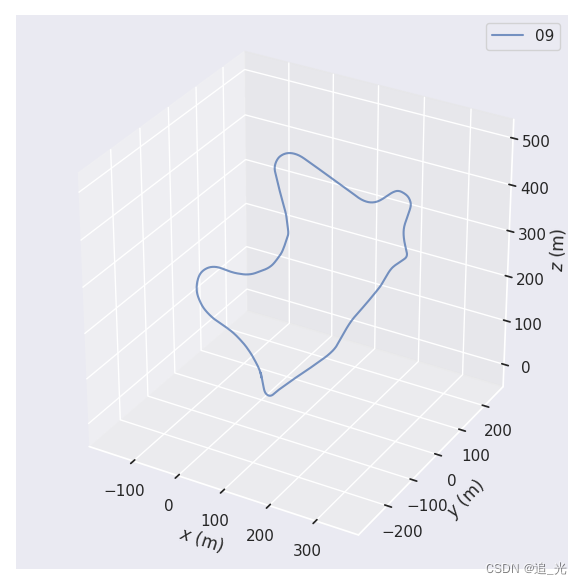
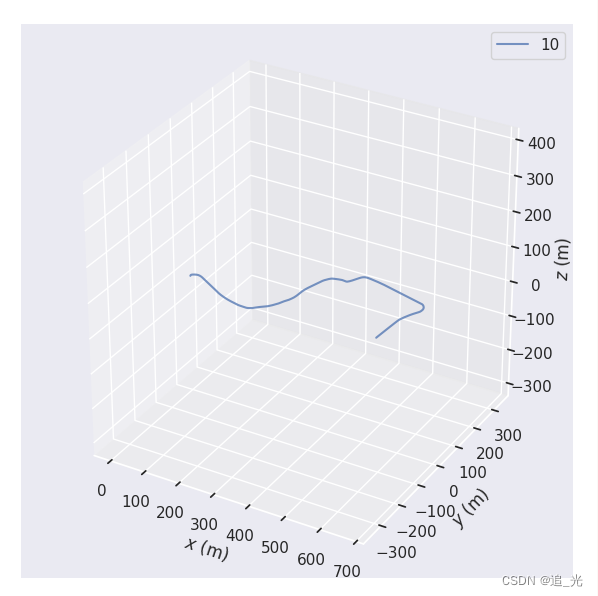
序列00-10的轨迹图
00

01

02

03

04

05

06

07

08

09

10
















 870
870











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









