







LVI-SAM评估
保存为KITTI格式的轨迹
参考链接:
在Ubuntu20.04系统上LIO-SAM跑KITTI数据集和自己数据集代码修改
A-loam运行kitti及轨迹保存
在LVI-SAM的/src/lidar_odometry/mapOptmization.cpp中找到publishOdometry()函数,在其中添加以下代码(kitti和tum格式二选一即可):
// 保存轨迹
//kitti格式
// // 位姿输出到txt文档
std::ofstream pose1("/home/nssc/sbk/code/slam/output/LVI-SAM/pose_kitti.txt", std::ios::app);
std::ofstream pose2("/home/nssc/sbk/code/slam/output/LVI-SAM/time.txt", std::ios::app);
pose1.setf(std::ios::scientific, std::ios::floatfield);
pose2.setf(std::ios::scientific, std::ios::floatfield);
// pose1.precision(15);
//save final trajectory in the left camera coordinate system.
Eigen::Matrix3d rotation_matrix;
rotation_matrix = Eigen::AngleAxisd(transformTobeMapped[2], Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(transformTobeMapped[1], Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(transformTobeMapped[0], Eigen::Vector3d::UnitX());
Eigen::Matrix<double, 4, 4> mylio_pose;
mylio_pose.topLeftCorner(3,3) = rotation_matrix;
mylio_pose(0,3) = laserOdometryROS.pose.pose.position.x ;
mylio_pose(1,3) = laserOdometryROS.pose.pose.position.y;
mylio_pose(2,3) = laserOdometryROS.pose.pose.position.z;
Eigen::Matrix<double, 4, 4> cali_paremeter;
// cali_paremeter << 4.276802385584e-04, -9.999672484946e-01, -8.084491683471e-03, -1.198459927713e-02, //00-02
// -7.210626507497e-03, 8.081198471645e-03, -9.999413164504e-01, -5.403984729748e-02,
// 9.999738645903e-01, 4.859485810390e-04, -7.206933692422e-03, -2.921968648686e-01,
// 0, 0, 0, 1;
cali_paremeter << -1.857739385241e-03,-9.999659513510e-01, -8.039975204516e-03, -4.784029760483e-03, //04-10
-6.481465826011e-03, 8.051860151134e-03, -9.999466081774e-01, -7.337429464231e-02,
9.999773098287e-01, -1.805528627661e-03, -6.496203536139e-03, -3.339968064433e-01,
0, 0, 0, 1;
/*cali_paremeter << 2.347736981471e-04, -9.999441545438e-01, -1.056347781105e-02, -2.796816941295e-03, // 03
1.044940741659e-02, 1.056535364138e-02, -9.998895741176e-01, -7.510879138296e-02,
9.999453885620e-01, 1.243653783865e-04, 1.045130299567e-02, -2.721327964059e-01,
0, 0, 0, 1;*/
Eigen::Matrix<double, 4, 4> myloam_pose_f;
myloam_pose_f = cali_paremeter * mylio_pose * cali_paremeter.inverse();
pose1 << myloam_pose_f(0,0) << " " << myloam_pose_f(0,1) << " " << myloam_pose_f(0,2) << " " << myloam_pose_f(0,3) << " "
<< myloam_pose_f(1,0) << " " << myloam_pose_f(1,1) << " " << myloam_pose_f(1,2) << " " << myloam_pose_f(1,3) << " "
<< myloam_pose_f(2,0) << " " << myloam_pose_f(2,1) << " " << myloam_pose_f(2,2) << " " << myloam_pose_f(2,3) << std::endl;
static auto T1 = timeLaserInfoStamp;
pose2 << laserOdometryROS.header.stamp - T1 << std::endl;
pose1.close();
pose2.close();
//tum格式
// 位姿输出到txt文档
std::ofstream pose0("/home/nssc/sbk/code/slam/output/LVI-SAM/pose_tum.txt", std::ios::app);
pose0.setf(std::ios::scientific, std::ios::floatfield);
pose0.precision(15);
Eigen::Matrix3d temp;
temp = myloam_pose_f.topLeftCorner(3,3);
Eigen::Quaterniond quaternion(temp);
// 获取当前更新的时间 这样与ground turth对比才更准确
pose0 << laserOdometryROS.header.stamp - T1 << " "
<< myloam_pose_f(0,3) << " "
<< myloam_pose_f(1,3) << " "
<< myloam_pose_f(2,3) << " "
<< quaternion.x() << " "
<< quaternion.y() << " "
<< quaternion.z() << " "
<< quaternion.w() << std::endl;
pose0.close();
使用KITTI数据集
参考之前的文章:
KITTI数据集转为LVI-SAM使用格式
将LVI-SAM修改为可以使用KITTI的代码
参考链接:LVI-SAM坐标系外参分析与代码修改,以适配各种数据集
代码:github:VI-SAM-Easyused
运行前需要修改的参数
以2011_09_30_0020为例
1.KITTI_lidar.yaml
31行:
T_IMU_LiDAR, LiDAR -> IMU
extrinsicTranslation: [8.10543972e-01, -3.07054372e-01, 8.02723995e-01]
extrinsicRotation: [9.999976e-01, -7.854027e-04, 2.024406e-03,
7.553071e-04, 9.998898e-01, 1.482454e-02,
-2.035826e-03, -1.482298e-02, 9.998881e-01]
修改为 下载解压的raw data
2011_09_30/calib_imu_to_velo.txt中的RT
extrinsicTranslation: [-8.086759e-01,3.195559e-01,-7.997231e-01]
extrinsicRotation: [9.999976e-01,7.553071e-04,-2.035826e-03,
-7.854027e-04,9.998898e-01,-1.482298e-02,
2.024406e-03,1.482454e-02,9.998881e-01]
2.KITTI_camera.yaml
19行:
image_width和image_height
修改为 下载解压的raw data
2011_09_30/2011_09_30_drive_0020_sync/image_00/data/0000000000.png的尺寸大小1226*370
27行:
fx: 7.215377e+02
fy: 7.215377e+02
cx: 6.095593e+02
cy: 1.728540e+02
修改为 下载解压的raw data
2011_09_30/calib_cam_to_cam.txt中的P_rect_00
P_rect_00: 7.070912e+02 0.000000e+00 6.018873e+02 0.000000e+00 0.000000e+00 7.070912e+02 1.831104e+02 0.000000e+00 0.000000e+00 0.000000e+00 1.000000e+00 0.000000e+00
P_rect_00 = (fx, 0,cx,delta1,0, fy,cy, delta2,0, 0, 1, delta3)
fx: 7.070912e+02
fy: 7.070912e+02
cx: 6.018873e+02
cy: 1.831104e+02
43行:
extrinsicRotation和extrinsicTranslation
通过kitti_imu2camera0.py计算获得
R:
[0.00781298, -0.0042792, 0.99996033,-0.99985947, -0.01486805, 0.00774856,0.0148343, -0.99988023, -0.00439476]
T:
[1.14389871,-0.31271847, 0.72654605]
3.轨迹
./lidar_odometry/mapOptmization.cpp
保存轨迹部分:
cali_paremeter
修改为
data_odometry_calib/dataset/sequences/06/calib.txt中Tr
Tr: -1.857739385241e-03 -9.999659513510e-01 -8.039975204516e-03 -4.784029760483e-03 -6.481465826011e-03 8.051860151134e-03 -9.999466081774e-01 -7.337429464231e-02 9.999773098287e-01 -1.805528627661e-03 -6.496203536139e-03 -3.339968064433e-01
cd catkin_ws
catkin_make -j4 -DCATKIN_WHITELIST_PACKAGES=lvi_sam
运行
roslaunch lvi_sam KITTI.launch
rosbag play kitti_2011_09_30_drive_0020_synced.bag
运行过程遇到的问题
opencv
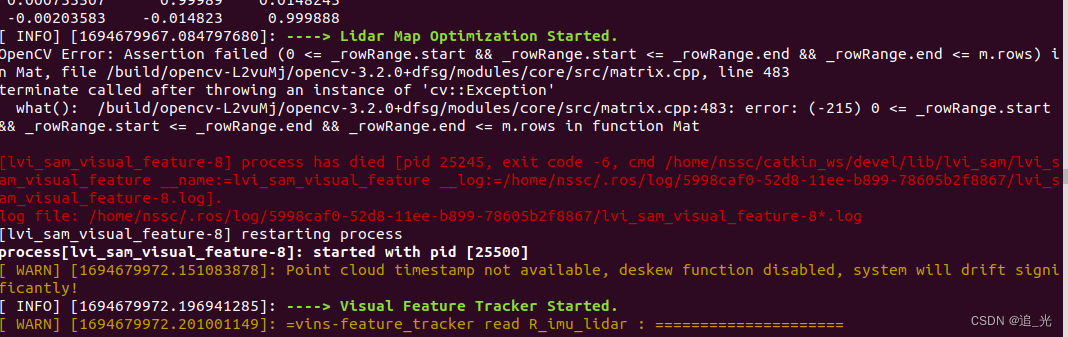 原因:不同序列的sync中图像的尺寸不同
原因:不同序列的sync中图像的尺寸不同
解决方法:将./config/KITTI_camera.yaml中图像尺寸改为相应运行序列的图像尺寸
image_width: 1226
image_height: 370
IMU加速度偏置估计出现异常值(部分序列出现)
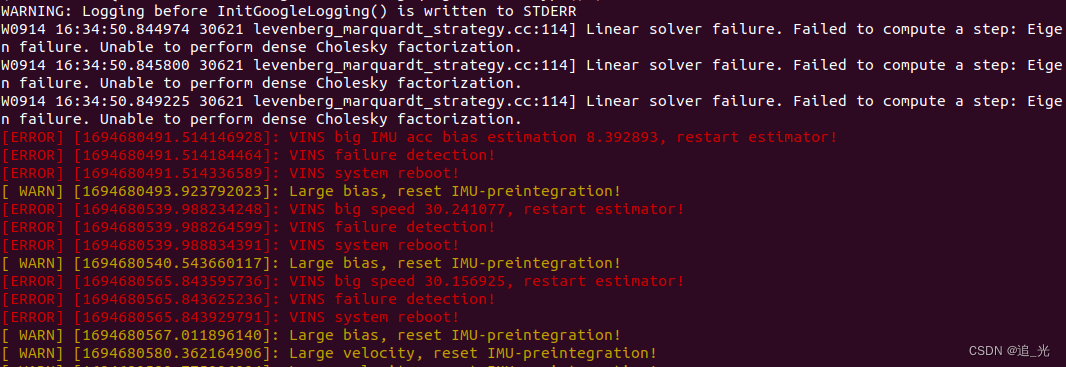 原因:KITTI_camera.yaml中的转换矩阵参数的问题(解决方法参考链接)+相机和IMU不同步+IMU初始化参数(不同的IMU初始值会导致有些序列error产生或消失)?
原因:KITTI_camera.yaml中的转换矩阵参数的问题(解决方法参考链接)+相机和IMU不同步+IMU初始化参数(不同的IMU初始值会导致有些序列error产生或消失)?
一个可能的原因:lio-sam中出现IMU large的原因
论文原因:视觉部分提取特征点数量过少,会导致IMU过大,从而视觉里程计重启
解决方法:无
escalating to SIFGTERM
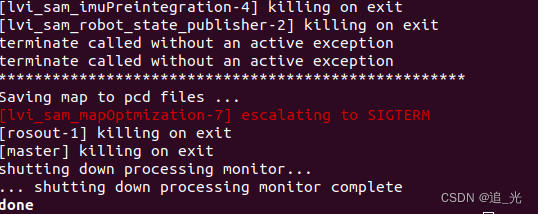
原因:运行结束,对roslaunch执行ctrl+c后,进程会执行rosspin()后面的程序,在一定时间内程序没有执行完毕,进程会强制退出,并抛出escalating to SIGTERM错误
解决方法:
cd /opt/ros/melodic/lib/python2.7/dist-packages/roslaunch
sudo gedit nodeprocess.py
#修改:_TIMEOUT_SIGINT = 15.0 为_TIMEOUT_SIGINT = 30.0
使用evo进行评估
具体使用方法参考之前的文章:
SLAM精度评估-EVO的使用
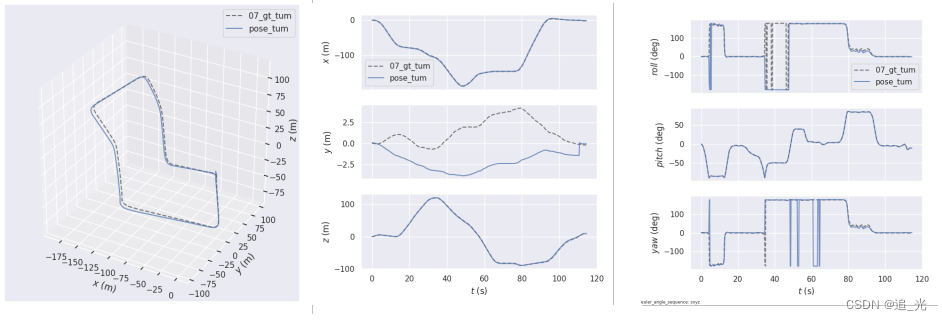
这里以2011_09_30_0027序列为例(对应真值07)展示结果
绘制轨迹
#tum:
evo_traj tum pose_tum.txt --ref=07_gt_tum.txt -p --plot_mode=xyz

轨迹评估
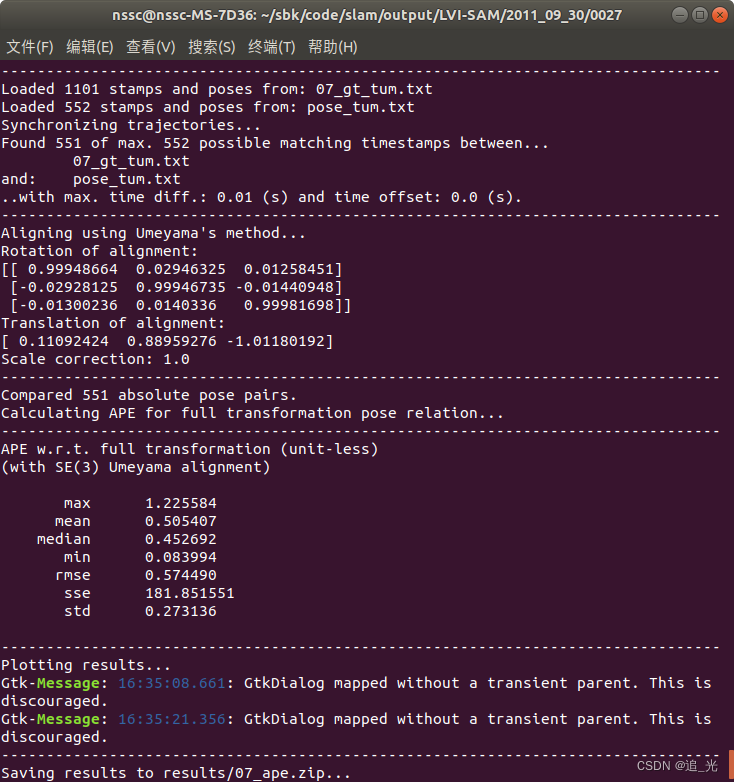
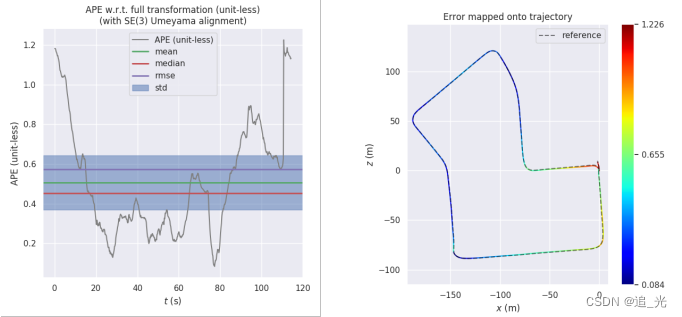
绝对姿态误差
mkdir results
evo_ape tum 07_gt_tum.txt pose_tum.txt -r full -va --plot --plot_mode xz --save_results results/07_ape.zip
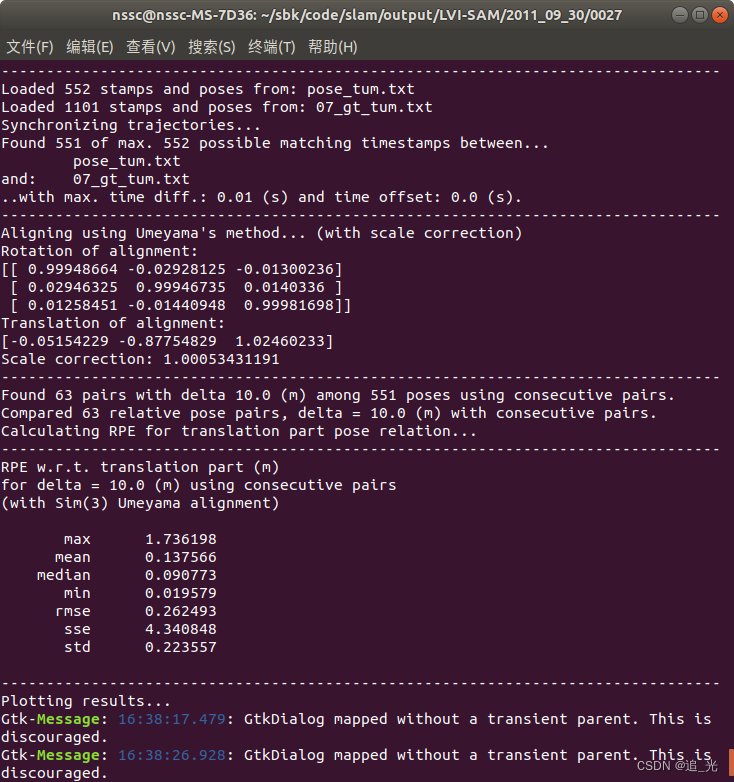
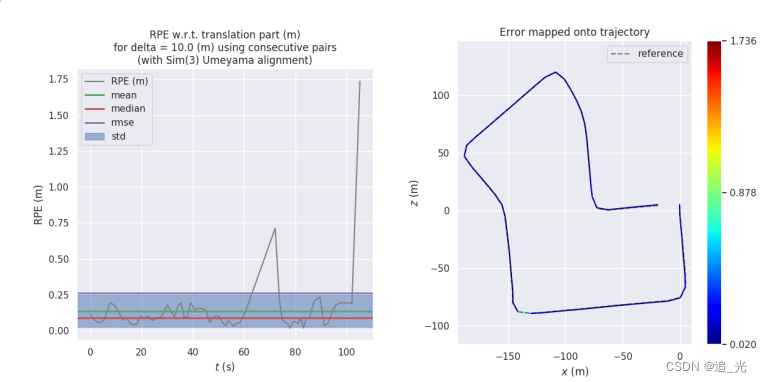
相对姿态误差
#每10米比较一次相对真实轨迹的轨迹误差:
evo_rpe tum pose_tum.txt 07_gt_tum.txt -r trans_part --delta 10 --delta_unit m -v -as --plot --plot_mode xz --save_results results/07_10m_rpe.zip
#每10°比较一次相对真实轨迹的轨迹误差:
evo_rpe tum 07_gt_tum.txt pose_tum.txt -r angle_deg --delta 10 --delta_unit d -v -as --plot --plot_mode xz --save_results results/07_10°_rpe.zip
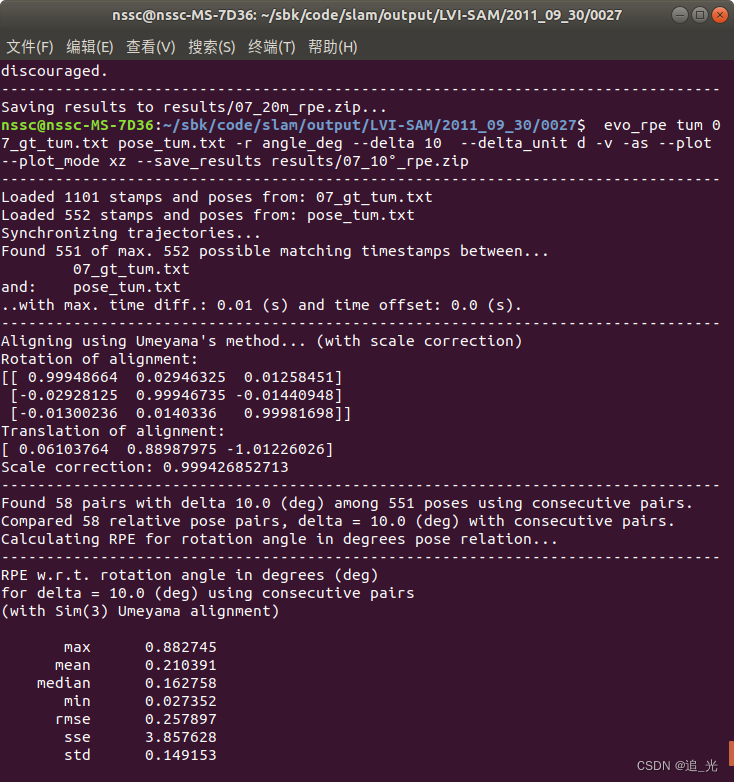
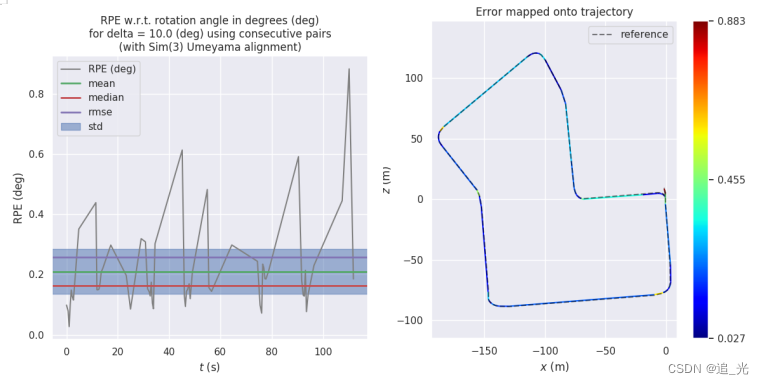
评估出现的问题
生成轨迹长度或pose数量与对应真值不同
原因:生成的kitti格式没有时间戳进行对齐
解决方法:github evo提供了contrib/kitti_poses_and_timestamps_to_trajectory.py,将kitti真值的times.txt和pose转为tum格式(项目里保存的轨迹格式也应为tum格式)
github evo链接
python kitti_poses_and_timestamps_to_trajectory.py ./kitti_gt/data_odometry_poses/dataset/poses/07.txt ./kitti_gt/data_odometry_calib/dataset/sequences/07/times.txt 07_gt_tum.txt















 1156
1156











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









