







 本文探讨了在VisionMaster中进行固定单相机标定以实现视觉引导,通过十二点旋转标定处理不共轴抓取问题。分析了由于旋转中心与工件中心不一致导致的X、Y坐标偏差,并介绍了如何通过圆拟合确定旋转中心。通过VM的旋转计算模块,可以消除旋转误差,但当存在平移时,需借助放射变换来求解真实偏移。文章还提到了如何在VM中创建基准点进行单点抓取操作。
本文探讨了在VisionMaster中进行固定单相机标定以实现视觉引导,通过十二点旋转标定处理不共轴抓取问题。分析了由于旋转中心与工件中心不一致导致的X、Y坐标偏差,并介绍了如何通过圆拟合确定旋转中心。通过VM的旋转计算模块,可以消除旋转误差,但当存在平移时,需借助放射变换来求解真实偏移。文章还提到了如何在VM中创建基准点进行单点抓取操作。
书接上回,九点标定用的是同心轴(工件中心和机器旋转点重合),但是会出现角度变化导致X、Y的偏差。
- 下图中央的大矩形是我们要抓的工件,实际就是PCB了,但是由于场地、机构受限,只能拍一半,就是三角形和圆那部分。此案例以识别三角行为匹配模板。
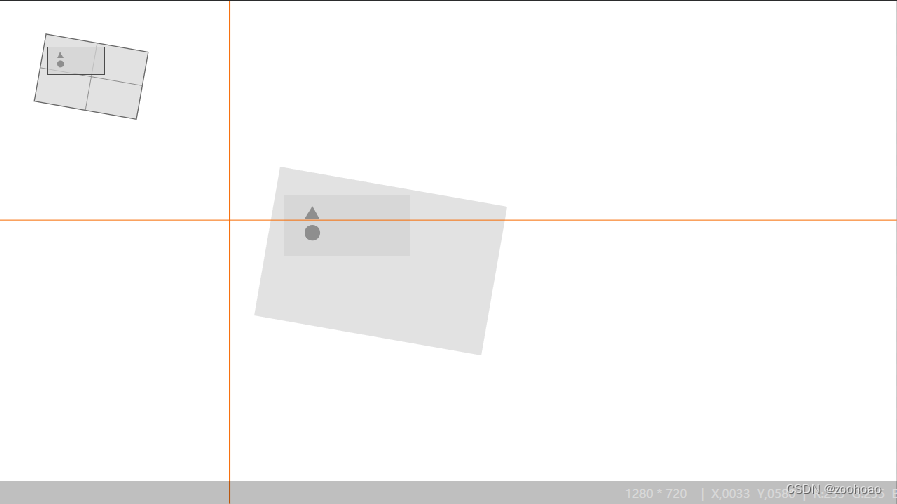
标定采用平移旋转标定,最后三点进行旋转,这三点一般位于第5点进行旋转不平移。当十二点标定完成后,我们使用标定转换看看坐标变化。
可以看出最后旋转的三点坐标,x、y误差相差较大。虽然只旋转了角度,但是由于旋转中心不一样,所以会出现x、y的变化。
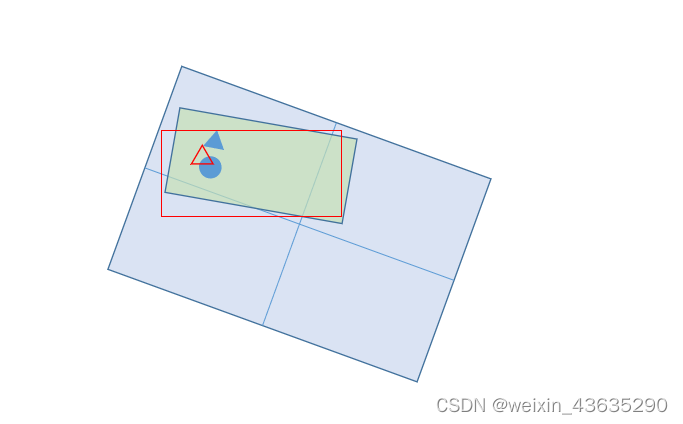
下图就是只旋转的变化图,可以看出,三角形中心位置发生了改变,这就是因为旋转中心和三角形的中心不一致导致的。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3173
3173

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









