







 本文详细介绍了在VisionMaster中进行固定单相机标定的步骤,包括12点标定、示教和定基准的过程。通过标定生成的标定文件,可以计算出工件中心抓取点的实际位置,从而实现视觉引导。在示教环节,强调了物理点的重要性,并解释了基准点的创建与应用,以确保机器人准确抓取。
本文详细介绍了在VisionMaster中进行固定单相机标定的步骤,包括12点标定、示教和定基准的过程。通过标定生成的标定文件,可以计算出工件中心抓取点的实际位置,从而实现视觉引导。在示教环节,强调了物理点的重要性,并解释了基准点的创建与应用,以确保机器人准确抓取。
it Mother~~ vm中的标定给我困扰了好几天,总算给我搞明白了。
标定三步走:标定 示教 做差 ,海康的文档中标定到示教愣是给我弄得稀里糊涂。总算搞明白了,实际应该是 标定 示教 定基准 做差
海康的单点抓取示例是相机在机械手上的,12张点位图(9点平移+3点旋转)。我都郁闷了,就没有固定相机的示例吗,前面标定示教不清不楚,又没有固定相机案例,还好总算搞明白了。
1. 标定
12点标定。我这里采用的是4张图,一张9点平移的,和三张旋转的。固定相机位,所以工件在图片视野内就行。
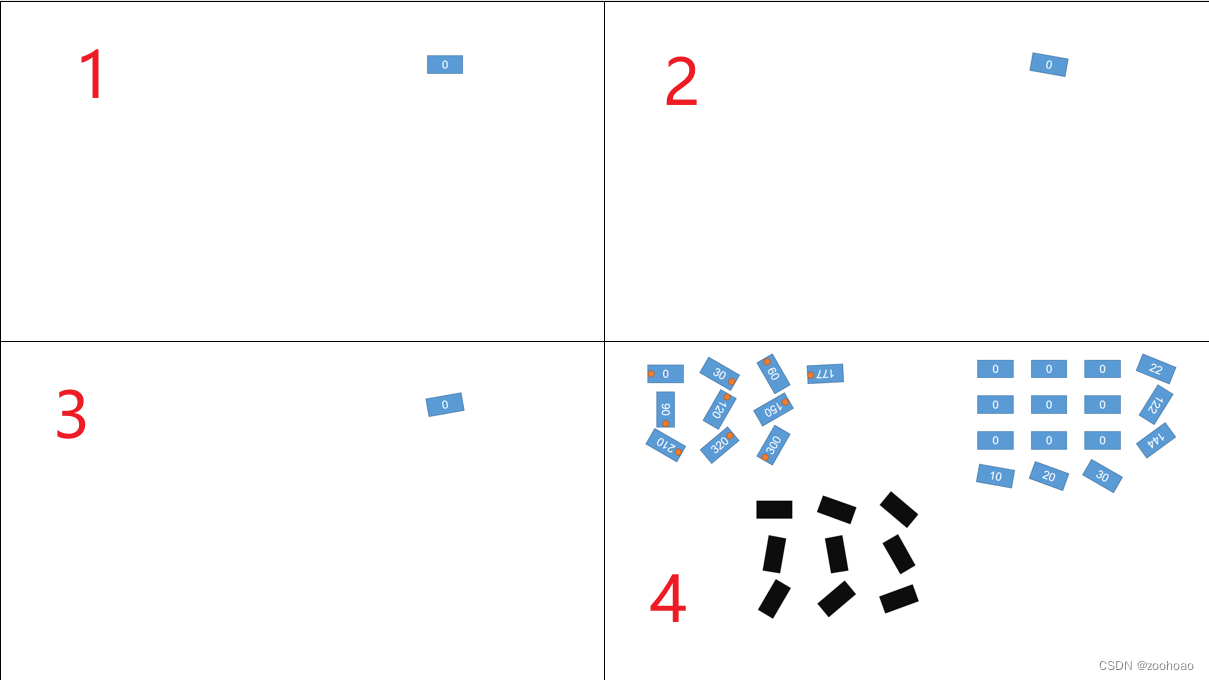
前面9点用第4张图就行识别标定

三张旋转的图片分别标定。当你不进行示教的话,在标定完第12点后,就会出现下图的样子,显示红色报错
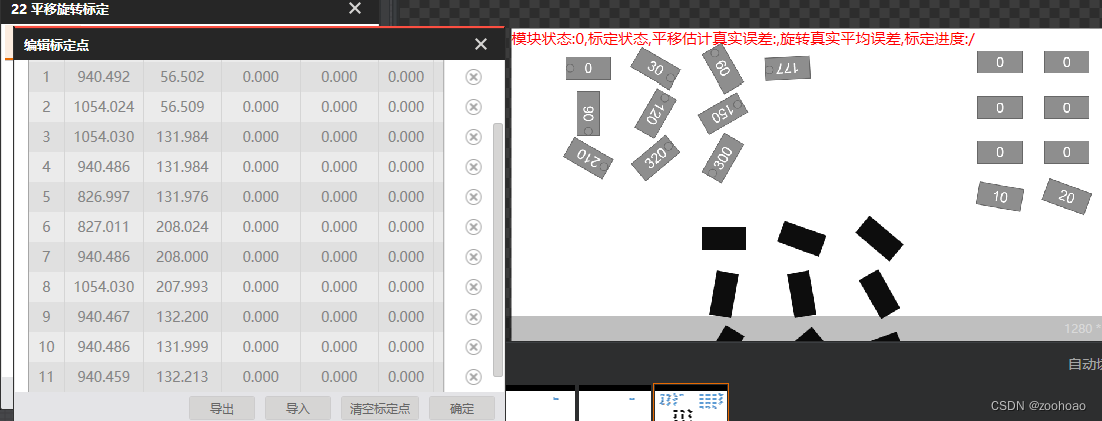
2. 示教<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 4409
4409

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









