






 本文详细解析了Mealy状态机与Moore状态机的工作原理及差异,通过实例序列“1101”的检测,阐述了两种状态机在状态转移、输出特性上的不同,并提供了RTL功能代码。
本文详细解析了Mealy状态机与Moore状态机的工作原理及差异,通过实例序列“1101”的检测,阐述了两种状态机在状态转移、输出特性上的不同,并提供了RTL功能代码。
mealy状态机的输出不仅与当前状态值有关,而且与当前输入有关。
moore状态机的输出仅与当前状态值有关,而与此时的输入无关
下面通过序列检测“1101”从右到左不重叠检测来详细说明这两种状态机的区别:
先规定一下状态机的状态转移图的表示,每个状态之间都有一个指向的箭头,表示跳转的过程,箭头上有标注的一组数据,斜杠(/)左边表达的是状态的输入,斜杠(/)右边表达的是状态的输出。
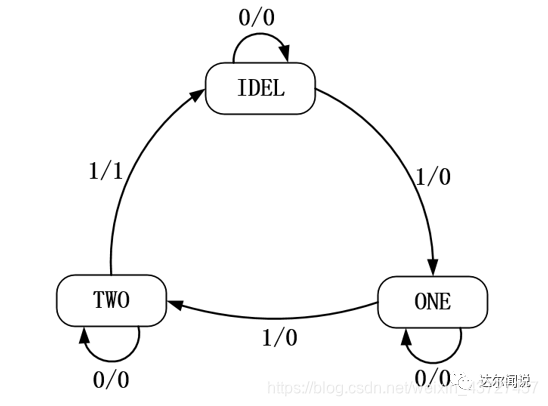
所以绘制状态转移图需要知道以下三个要素:
(1)输入:根据输入可以确定是否需要进行状态转移以及输出,是影响状态机系统执行过程的重要驱动力。
(2)输出:根据当前时刻的状态以及输出,是状态机系统最终要执行的动作。
(3)状态:根据输入和上一个状态决定当前时刻所处的状态,是状态机系统执行的一个稳定过。
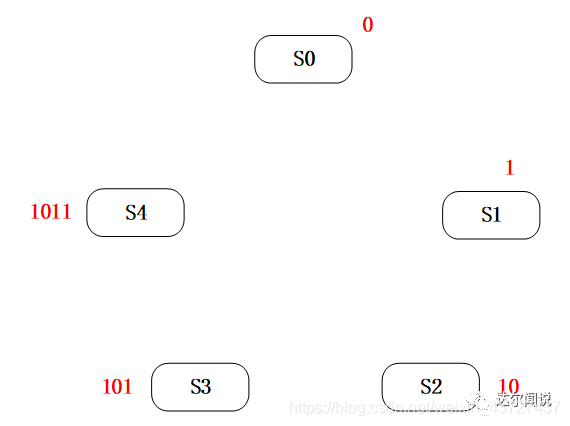
根据这些抽象出的要素我们就可以绘制状态转移图了,首先我们根据分析的状态数先画出5个状态,如下图所示,每个状态我们取一个状态名(题目中有要求用S0, S1, S2, …标识):接收的到值为0的状态我们取名为S0,该状态也成为初始状态;
接收的到值为1的状态我们取名为S1;
接收的到值为10的状态我们取名为S2;
接收的到值为101的状态我们取名为S3;
接收的到值为1011的状态我们取名为S4。
从第一个S0状态开始分析,从初始状态开始进行跳转。如下图所示,在S0状态下有两种跳转情况:一种情况是输入为0,没有任何有用的序列值,状态继续维持在S0;另一种情况是输入为1,序列值变为1,状态跳转到S1。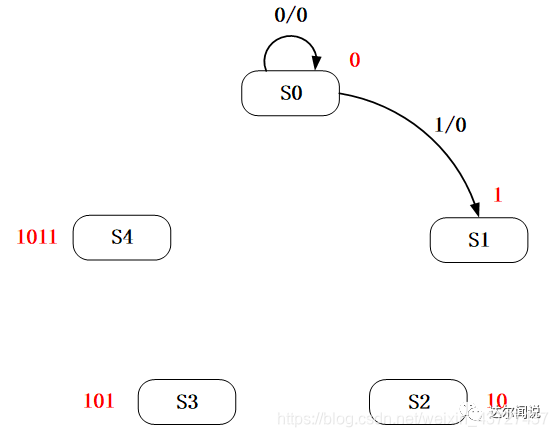
接着分析S1状态跳转的情况。如下图所示,在S1状态下同样有两种跳转情况:一种情况是输入为0,序列值变为10,状态跳转到S2;另一种情况是输入为1,序列值变为11,状态还是继续维持在S1,相当于是之前输入的1被抛弃,新输入的1进入序列的检测。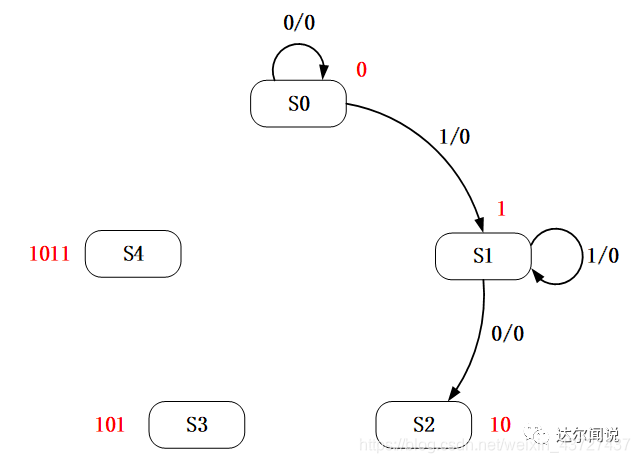
继续分析S2状态跳转的情况。如下图所示,在S2状态下同样有两种跳转情况:一种情况是输入为0,此时序列变为100,所有的值都没用了,状态跳转到初始状态S0;另一种情况是输入为1,序列变为101,状态跳转到S2。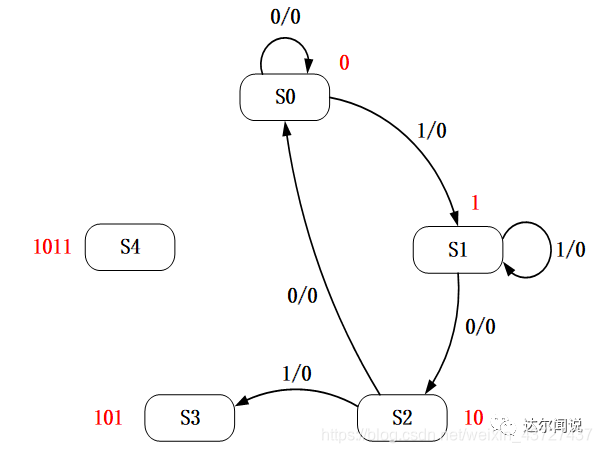
下面该分析S3状态跳转的情况了。如下图所示,在S3状态下依然也有两种跳转情况:一种情况是输入为0,此时序列变为1010,状态回到S2,相当于是之前输入的10被抛弃,新组合成的10进入序列的检测;另一种情况是输入为1,即在S3状态下的输入为1,此时的序列为1011,已经满足了我们题目中的序列检测的要求了,可以有输出了。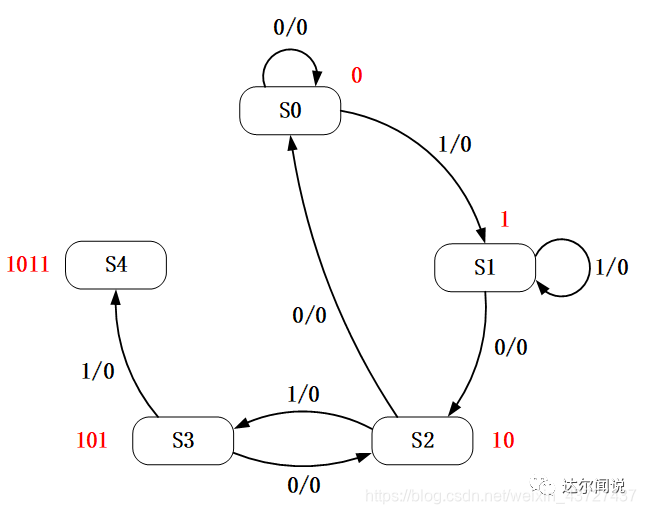
S4状态的存在是区分Moore和Mealy状态机的关键
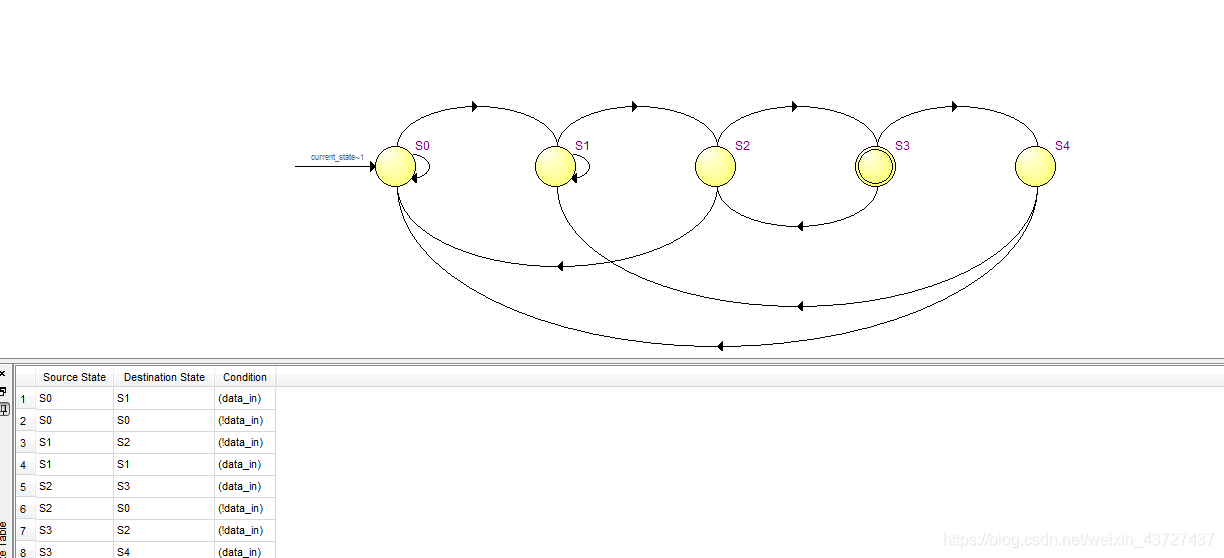
按照上面5种状态的状态转移图来继续分析,S3状态下的第二种情况时虽然满足了1011的序列,但是我们先不输出,而是跳转到S4状态,再继续分析S4状态的跳转情况。如下图所示,在S4状态下依然也有两种跳转情况:一种情况是输入为0,序列变为10110,输出1表示检测到了1011序列,同时状态跳转到S0;另一种情况是输入为1,序列变为10111,也会输出1表示检测到了1011序列,但状态会跳转到S1,因为最后输入的1还可以进行下一次1011序列的检测。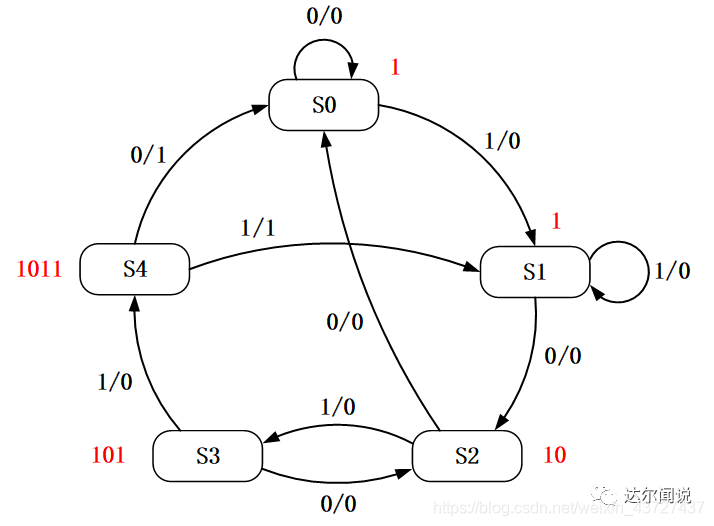
如果最后的输出只和当前状态有关而与输入无关则称为moore型状态机:上图所表达的状态转移图就是moore型的,因为在S4状态下无论输入是0还是1都已经检测到了1011序列,都会有输出,显然和输入时无关的。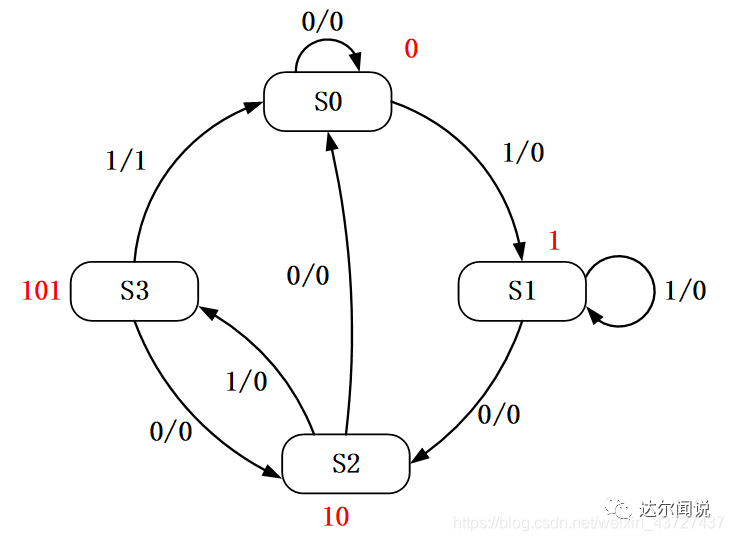
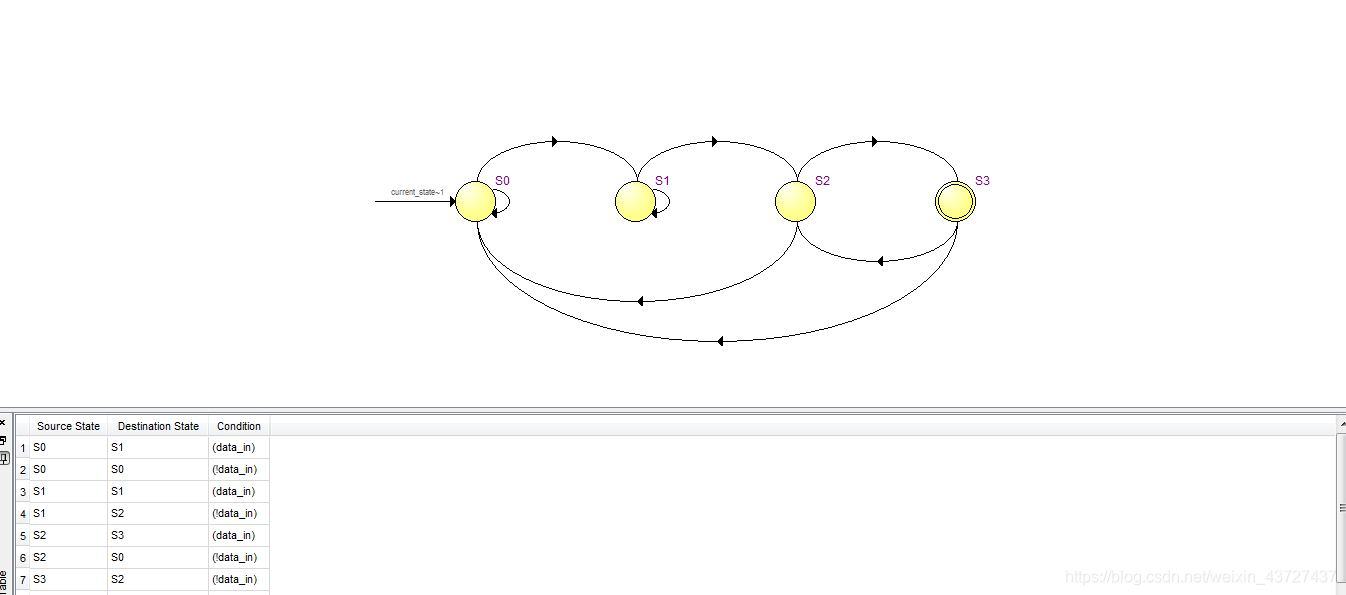
如果最后的输出不仅和当前状态有关还和输入有关则称为mealy状态机:上图所表达的状态转移图就是mealy型的
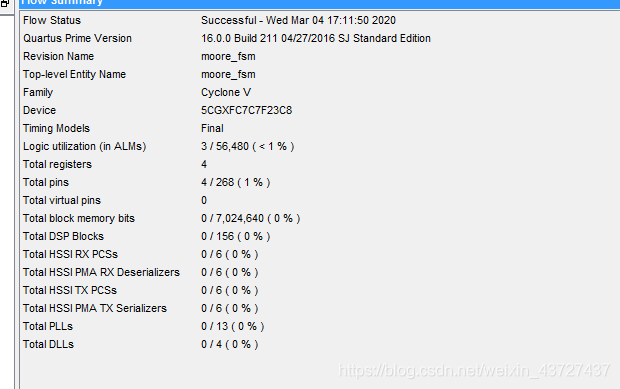
moore型状态机的RTL功能代码如下所示:
module moore_fsm(
input sclk,
input rst_n,
input data_in,
output reg data_out
);
//--------define parameter and interdace signals-----
parameter S0 = 5'b0_0001;
parameter S1 = 5'b0_0010;
parameter S2 = 5'b0_0100;
parameter S3 = 5'b0_1000;
parameter S4 = 5'b1_0000;
reg [4:0] current_state;
reg [4:0] next_state;
//---------main code---------------
//the first FSM
always @ (posedge sclk or negedge rst_n) begin
if(!rst_n)
current_state <= S0;
else
current_state <= next_state;
end
//the second FSM
always @ (*) begin
case(current_state)
S0 : if(data_in==1'b1)
next_state <= S1;
else
next_state <= S0;
S1 : if(data_in==1'b0)
next_state <= S2;
else
next_state <= S1;
S2 : if(data_in==1'b1)
next_state <= S3;
else
next_state <= S0;
S3 : if(data_in==1'b1)
next_state <= S4;
else
next_state <= S2;
S4 : if(data_in==1'b1)
next_state <= S1;
else
next_state <= S0;
default : next_state <= S0;
endcase
end
//the third FSM
always @ (posedge sclk or negedge rst_n) begin
if(!rst_n)
data_out <= 1'b0;
else if(next_state==S4)
data_out <= 1'b1;
else
data_out <= 1'b0;
end
endmodule
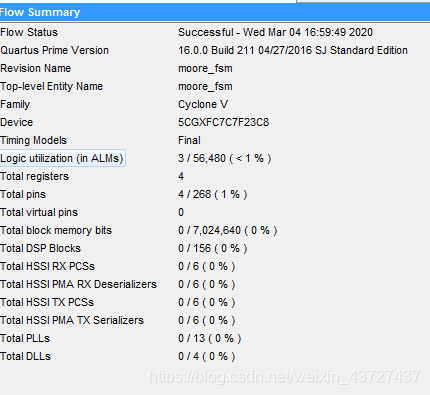
mealy型状态机的RTL功能代码如下所示:
module moore_fsm(
input wire sys_clk , //系统时钟50MHz
input wire sys_rst_n , //全局复位
input wire data_in , //外部输入的序列
output reg data_out //检测到1011序列后的输出信号
);
//只有4种状态,使用独热码
parameter S0 =4'b0001;
parameter S1 =4'b0010;
parameter S2 =4'b0100;
parameter S3 =4'b1000;
reg [3:0] current_state;
reg [3:0] next_state;
always @ (posedge sys_clk or negedge sys_rst_n) begin
if(!sys_rst_n)
current_state <= S0;
else
current_state <= next_state;
end
always@(*) begin
case(current_state)
S0 : if(data_in ==1'b1)
next_state <= S1;
else
next_state <= S0;
S1 : if(data_in ==1'b0)
next_state <= S2;
else
next_state <= S1;
S2 : if(data_in ==1'b1)
next_state <= S3;
else
next_state <= S0;
S3 : if(data_in ==1'b1)
next_state <= S0;
else
next_state <= S2;
default: next_state <= S0;
endcase
end
always@(posedge sys_clk or negedge sys_rst_n) begin
if(sys_rst_n == 1'b0)
data_out <=1'b0;
else if(current_state == S3 && data_in ==1'b1)
data_out <=1'b1;
else
data_out <=1'b0;
end
/*
reg[3:0] state;
//第一段状态机,描述当前状态state如何根据输入跳转到下一状态
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
state <= S0;
else case(state)
S0 : if(data_in ==1'b1)
state <= S1;
else
state <= S0;
S1 : if(data_in ==1'b0)
state <= S2;
else
state <= S1;
S2 : if(data_in ==1'b1)
state <= S3;
else
state <= S0;
S3 : if(data_in ==1'b1)
state <= S0;
else
state <= S2;
default: state <= S0;
endcase
//第二段状态机,描述当前状态state和输入如何影响输出
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
data_out <=1'b0;
else if(state == S3 && data_in ==1'b1)
data_out <=1'b1;
else
data_out <=1'b0;
*/
endmodule


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









