









使用FOC控制的目的
通过直流电控制无刷电机能够更加稳定,节能的运行,稳定指的是扭矩维持稳定,节能是指减少非运动方向上的能量消耗
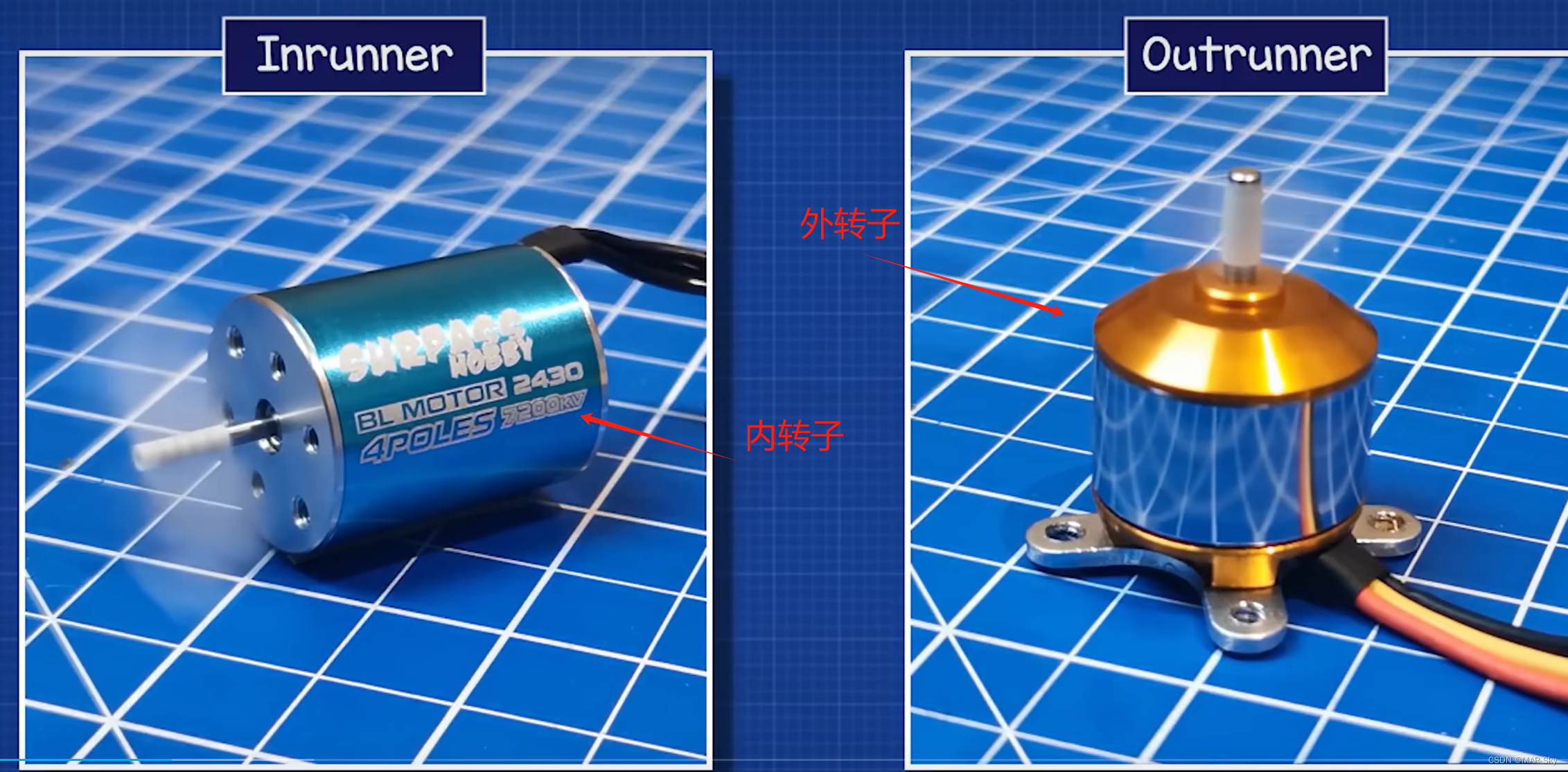
无刷电机种类
一般有两种,一种是内定子,另一种是外定子。都是定子绕线,转子上有序排布的永磁体。下图中的外转子电机的外壳一直在转动。
外转子优点:同等体积下,扭矩比内转子大
实现的整体思路
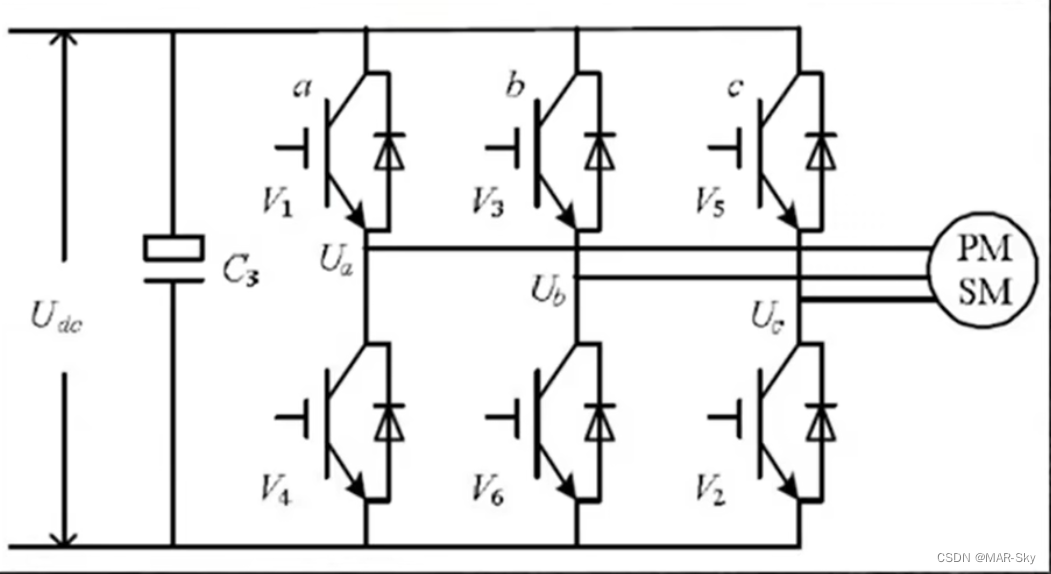
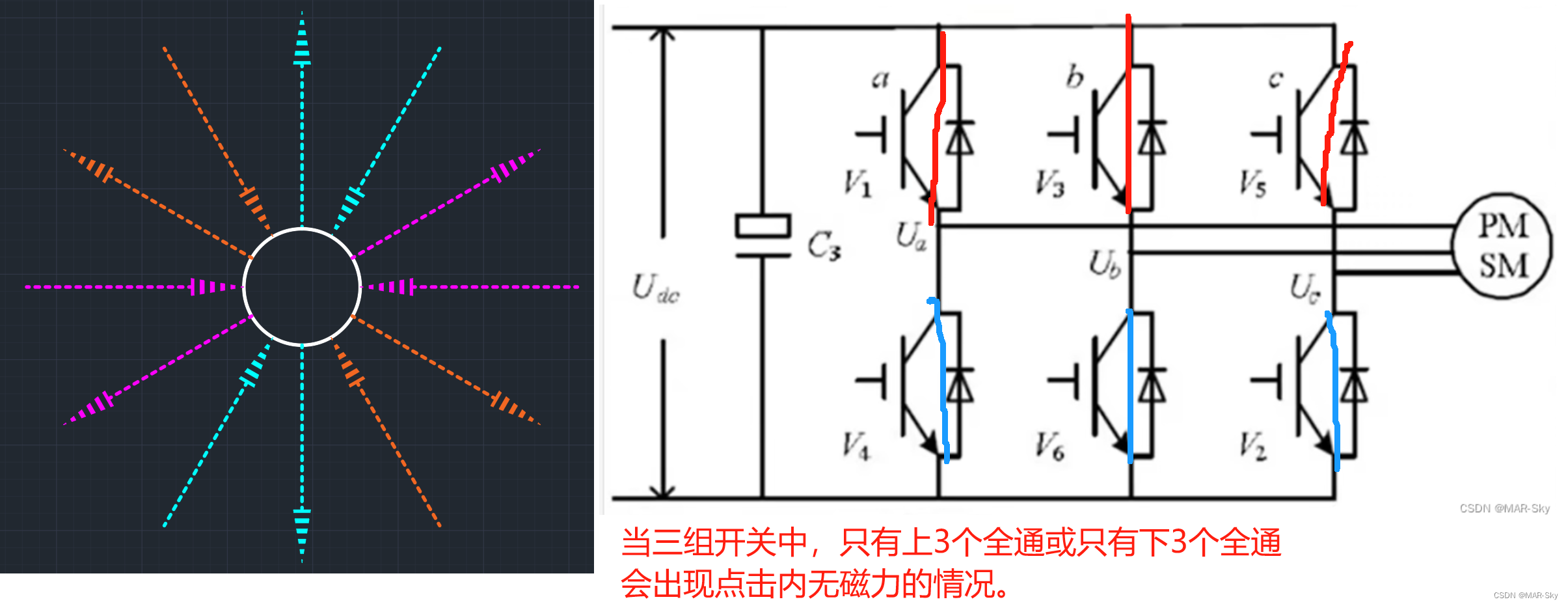
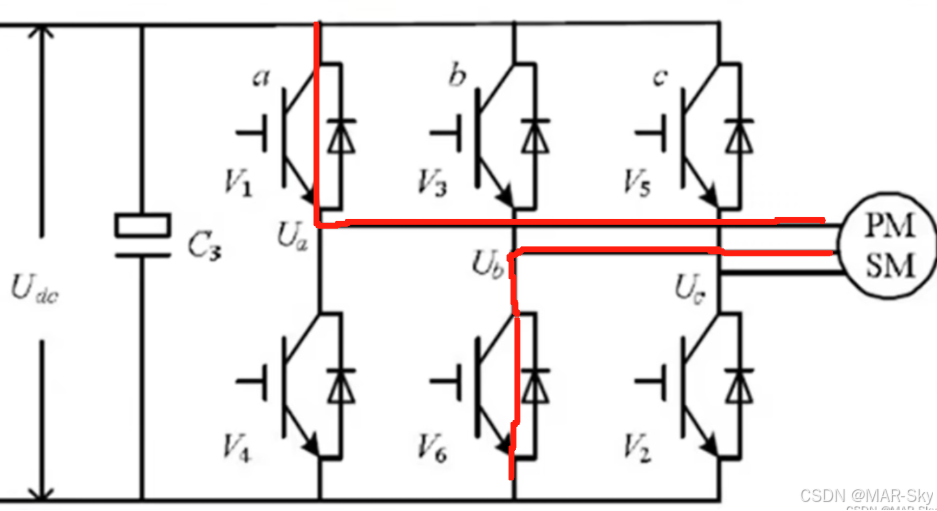
使用控制器控制六个开关控制电机三相绕线的电流输入时机,进而达到控制电机稳定工作的目的,如下图中所示,其中主要是控制三个IGBT开关的通断时间。
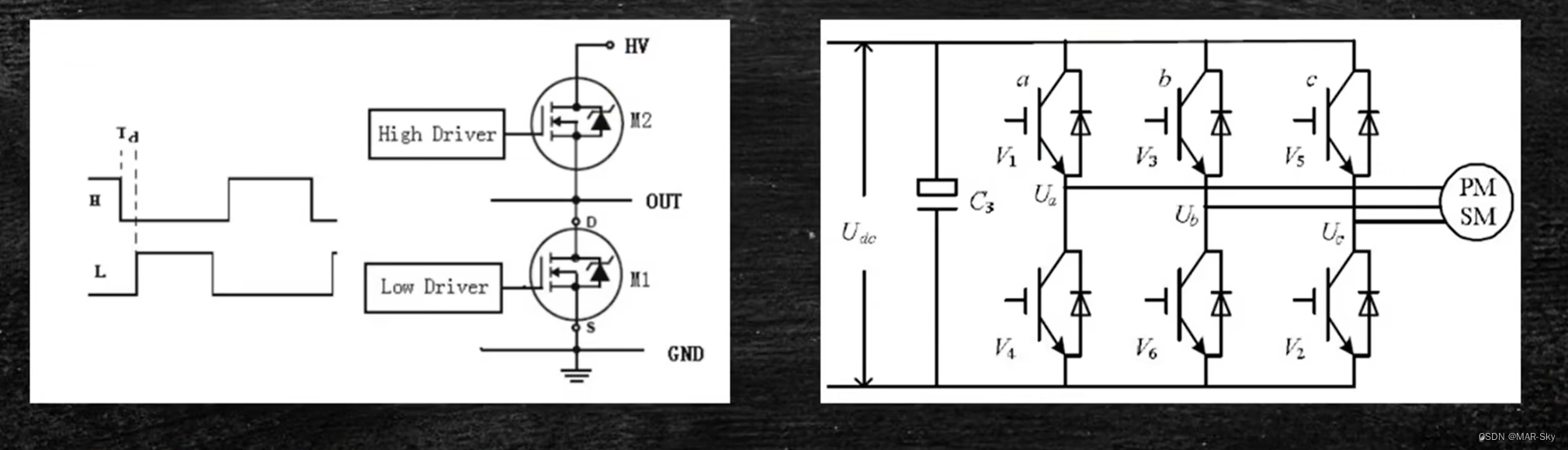
开关通断的基本要求,以上下做为一组。注意,一组开关同一时间最多只能打开一个(否则会短路)
基本概念介绍
FOC(Field-Oriented Control),直译是磁场定向控制,也被称作矢量控制(VC,Vector Control),是目前无刷直流电机(BLDC)和永磁同步电机(PMSM)高效控制的最优方法之一。
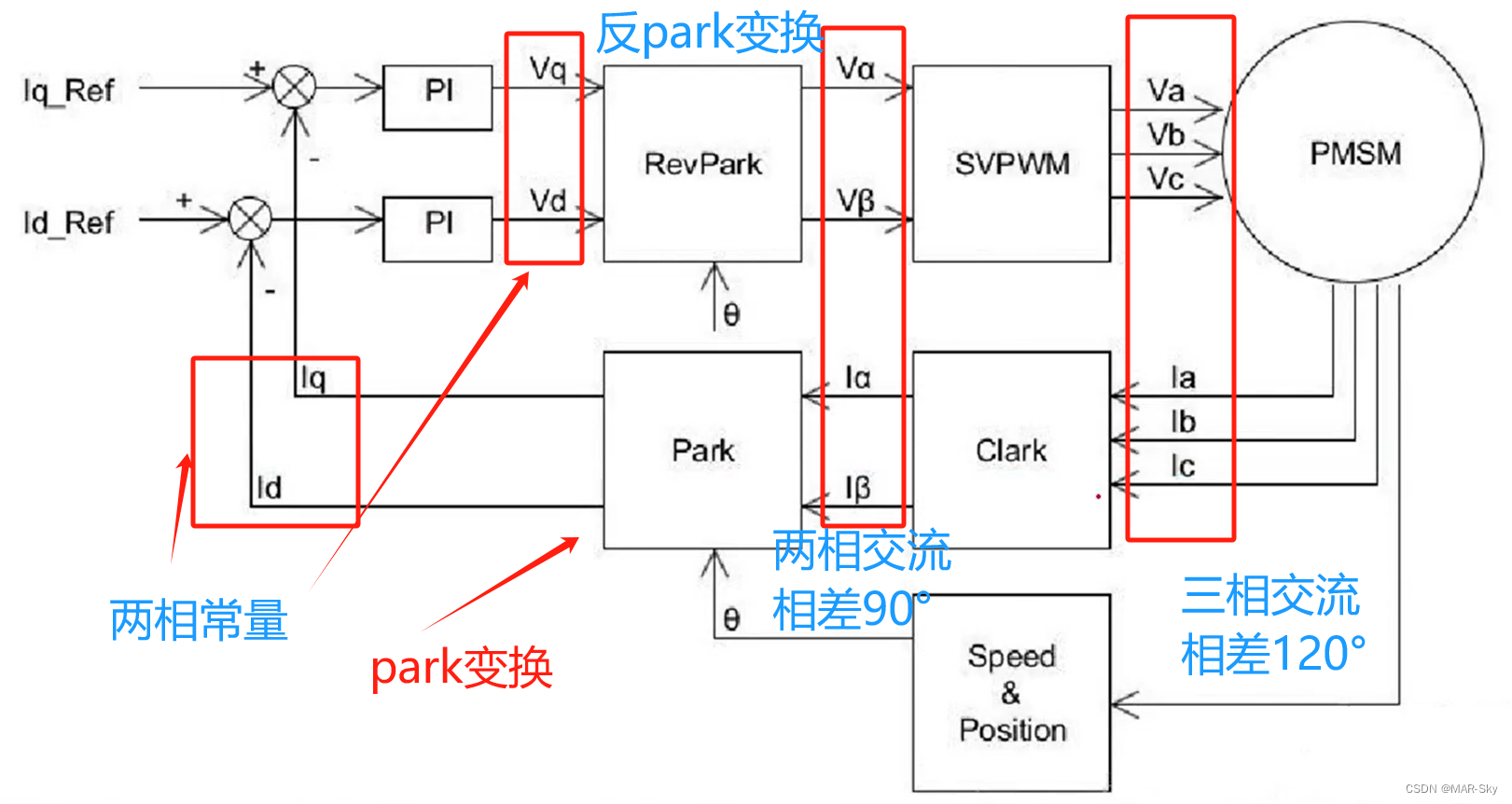
FOC控制的框图理解
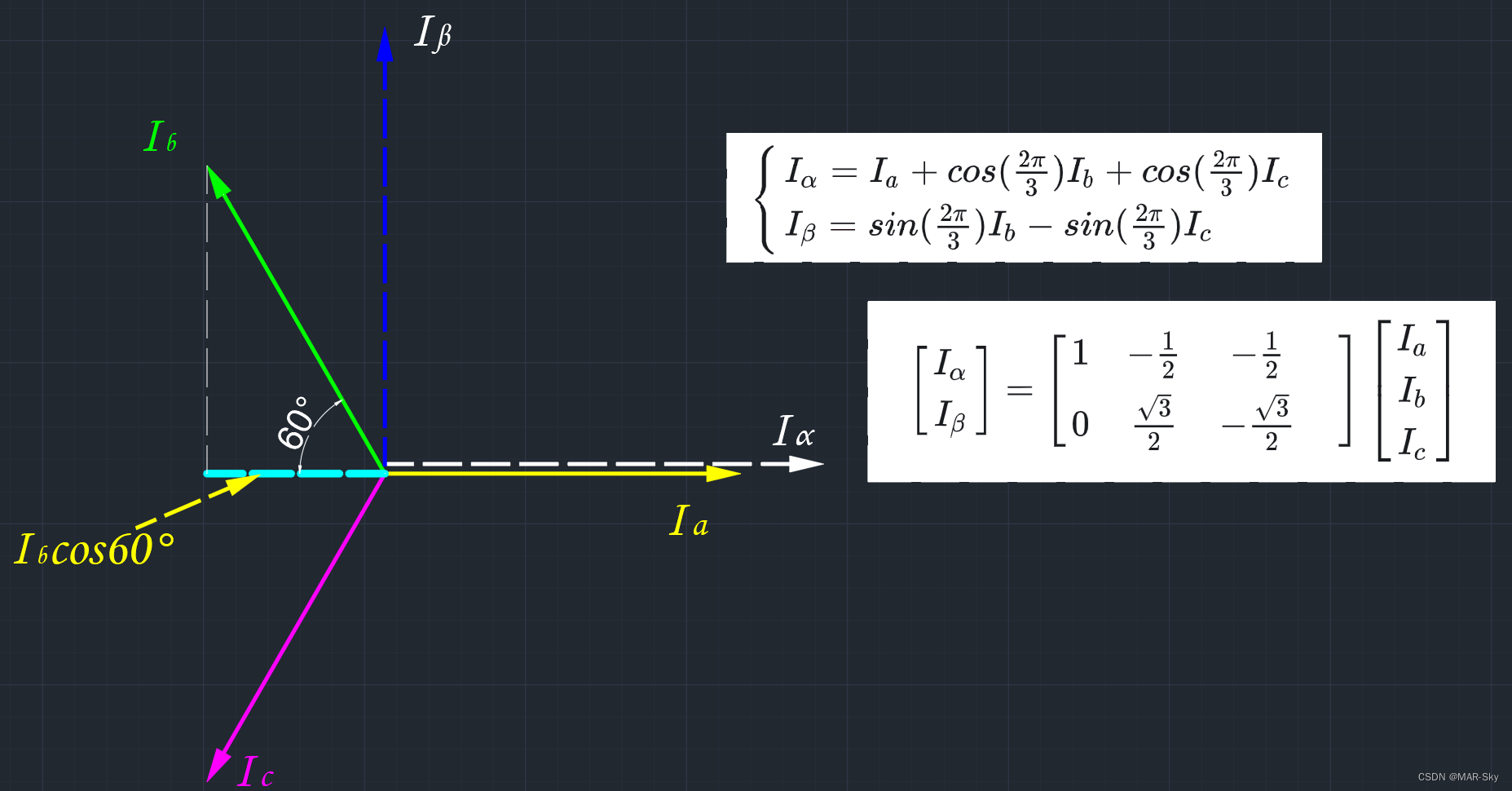
从物理量控制来说,最初的物理量是电机中的电流信息。但想要将直流电源变化为控制好时刻变化的交流量来说很困难,但经过两次变换(Clark和Park变换)之后,需要控制的量变成了常量,这时控制起来就轻松很多。
下面截取参考资料中的部分
下面是Clark变换,前提条件是三相电流中的某一相和其他两相刚好是时刻相反
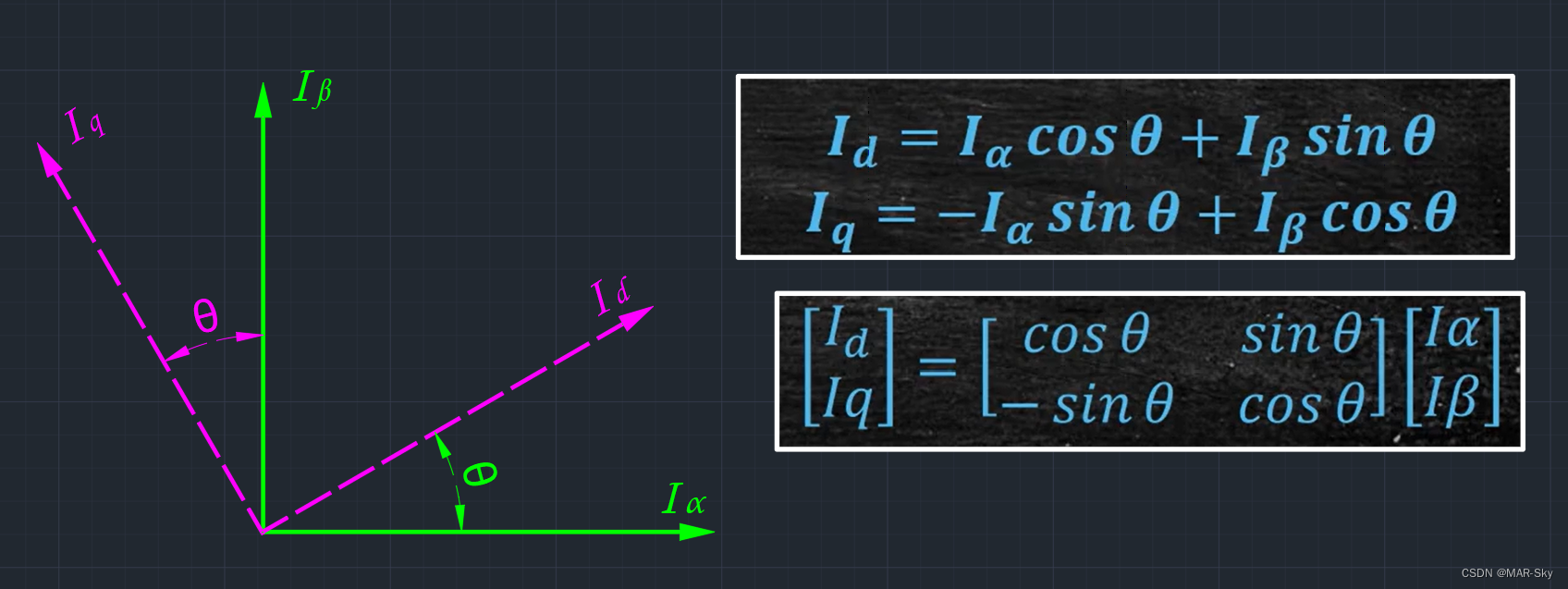
下面是park变换,表示了两个交流变量和两个常量的关系
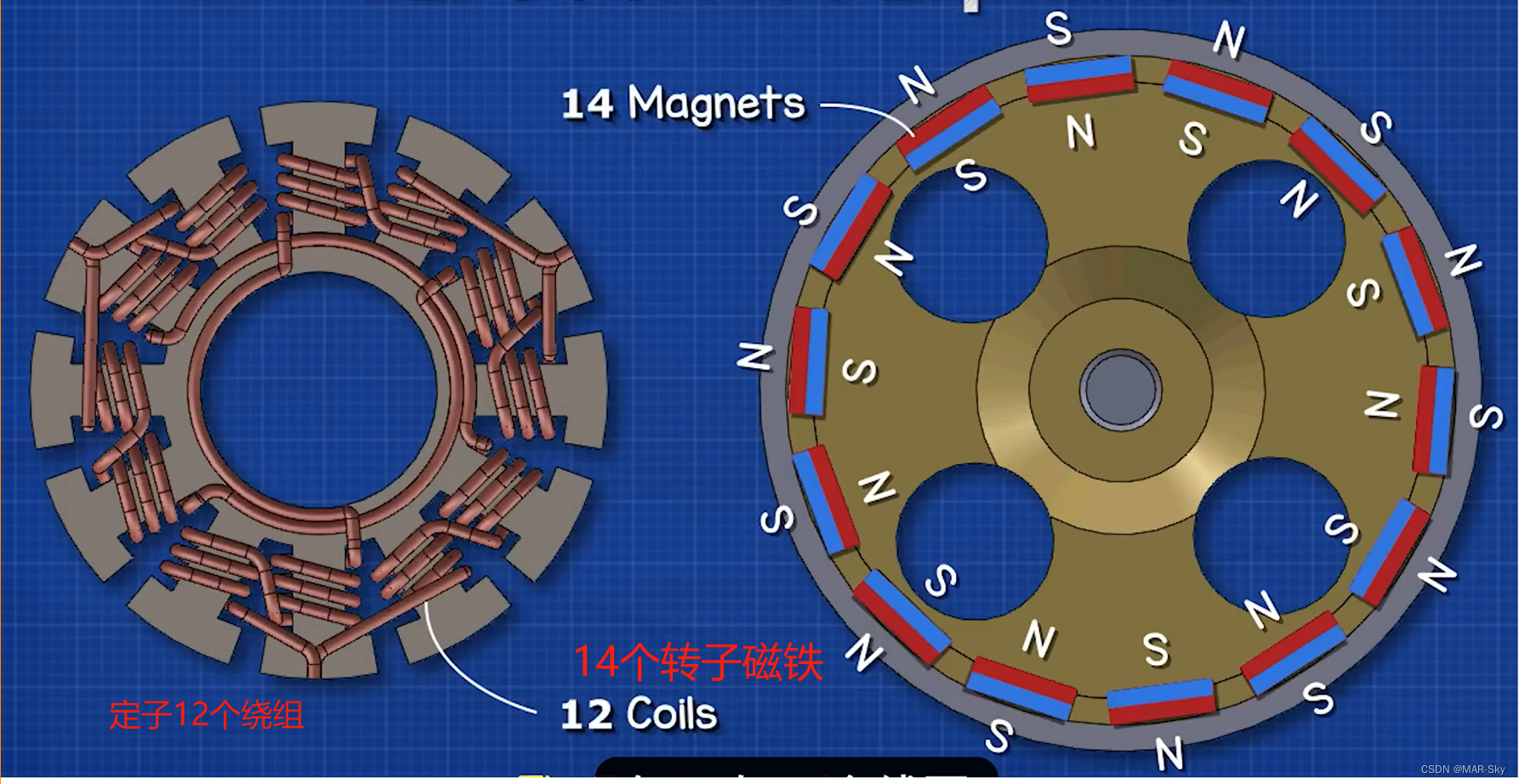
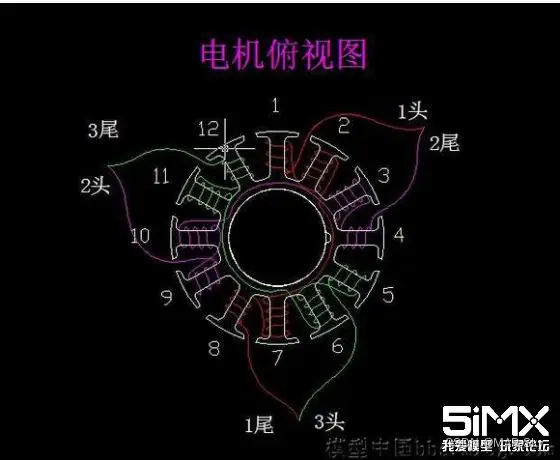
电机内部绕线分布
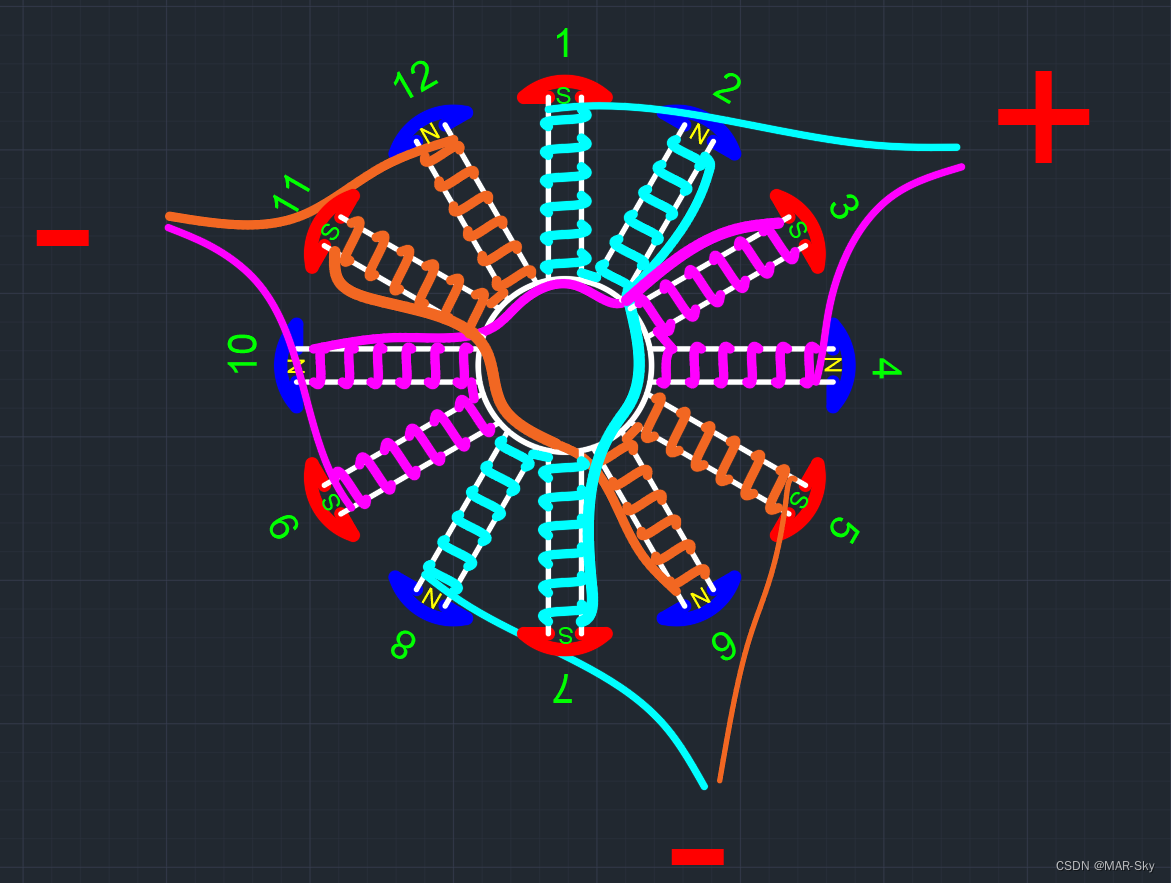
定子和转子内部分布情况如下,12个定子的磁极和14个转子的磁极永远不可能全部对齐。理想情况下,就是在定子线圈有规律的变换情况下,转子受到的合力只有与外壳相切的力,简言之,最后转子所受合力只有让转子转动的力。
首先,三组开关的通断决定了电机中绕线中电流方向,但由于是直流电,在某一时刻流过电机绕线方向一定。为了满足在任意时刻电机所受力稳定,进入绕线的力矩大小相等,受力方向分布均匀,最终受力为0,保证电机本身运行稳定
在示意图中分析电机线圈受力
参考
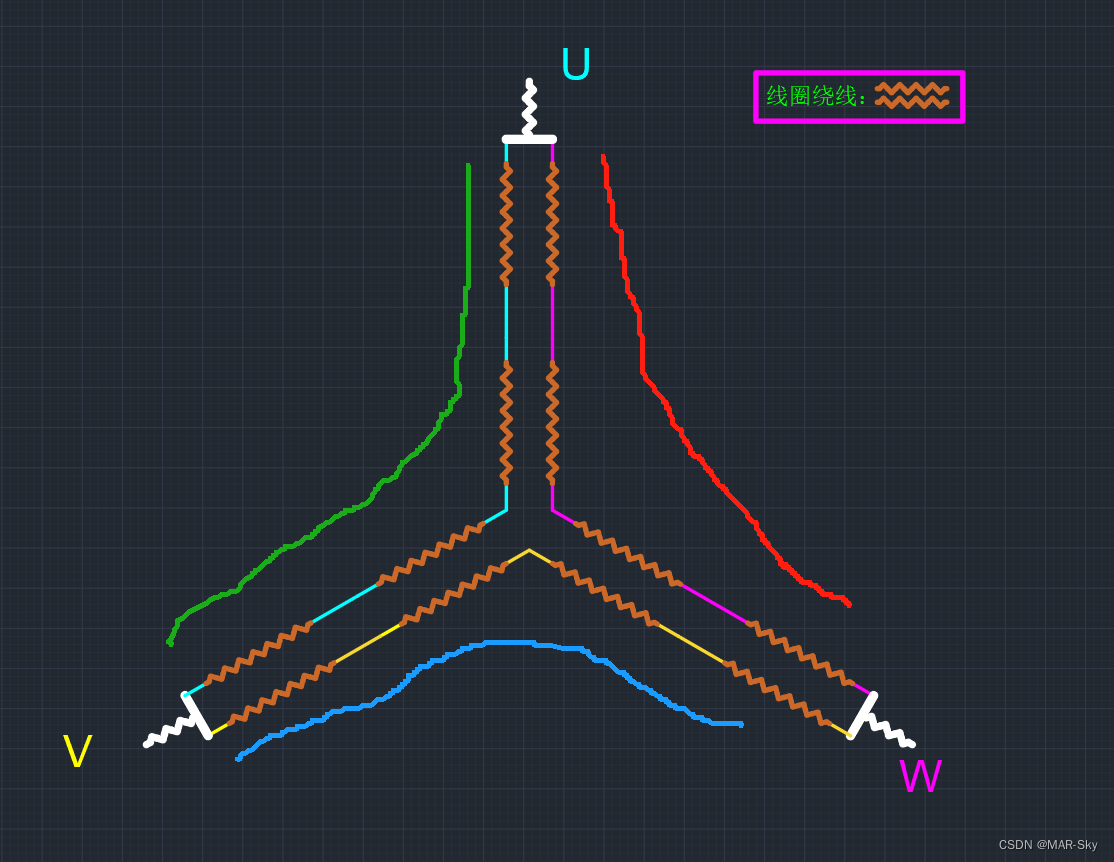
根据上面电机绕组为12个,每条线对应的4个绕线。为了满足直流流过时每个绕组产生的磁力大小一定相等,那么一个回路中绕线的阻值应该相同。下图是
下图是上面对应连接的示意图,其中相邻两个绕线的方式是相反的
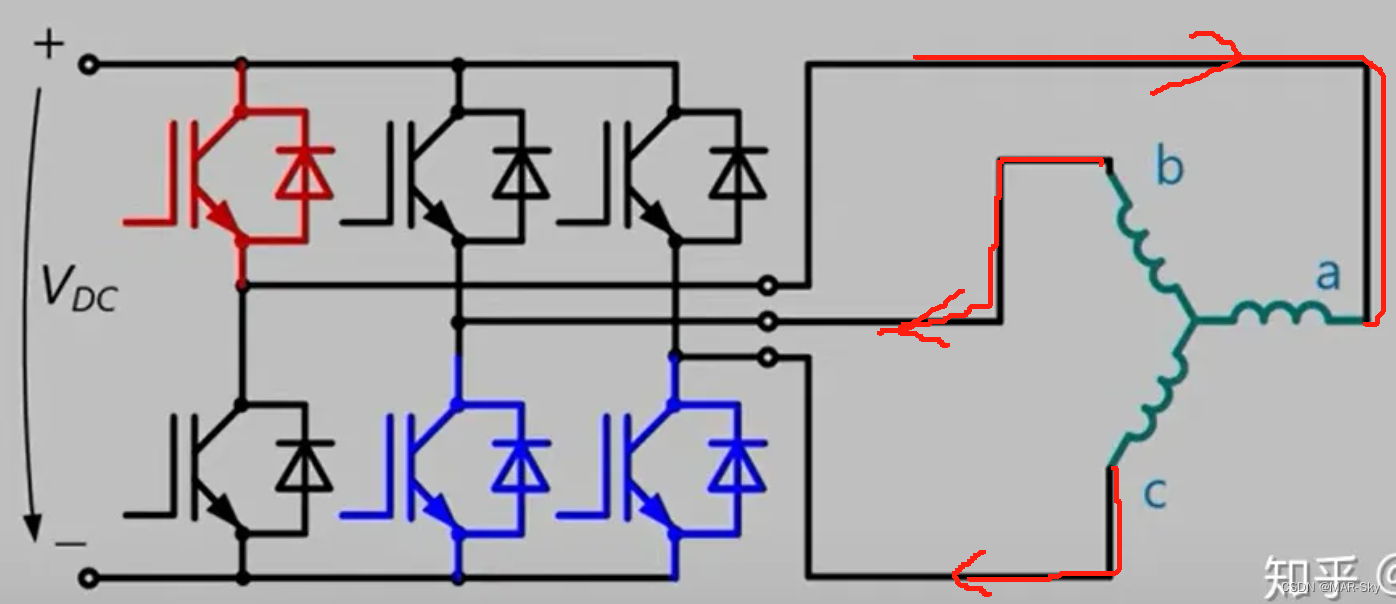
简化上图后如下,当其中一头作为正极输入,其他两个作为负极输出,如下图
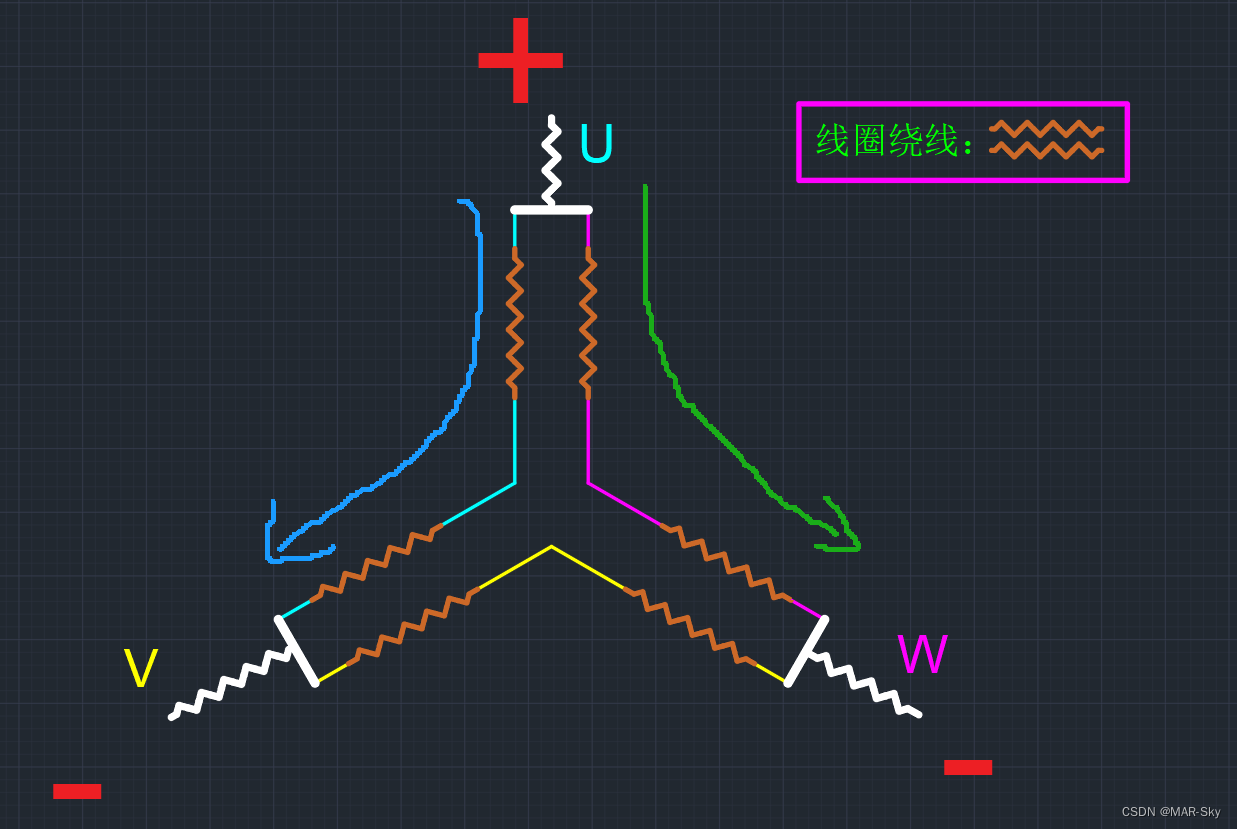
就像下图中,两组绕线带磁性,但发现磁头是关于中心对称的,又因为经过导线电流相同,所以沿磁头方向的合力为0 ,只剩下垂直于磁头方向的力,也就是让转子旋转的力。
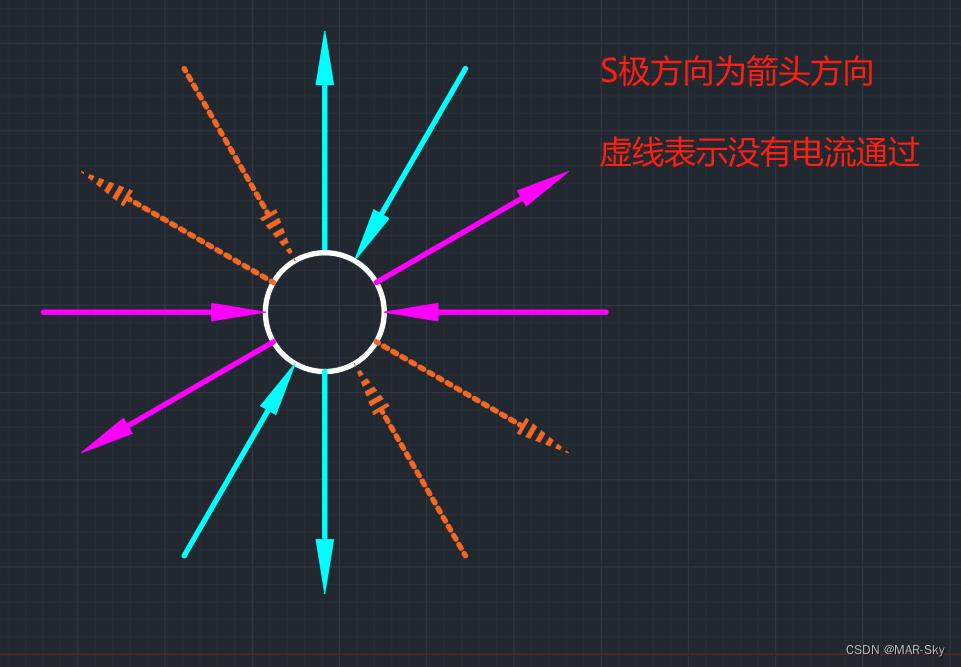
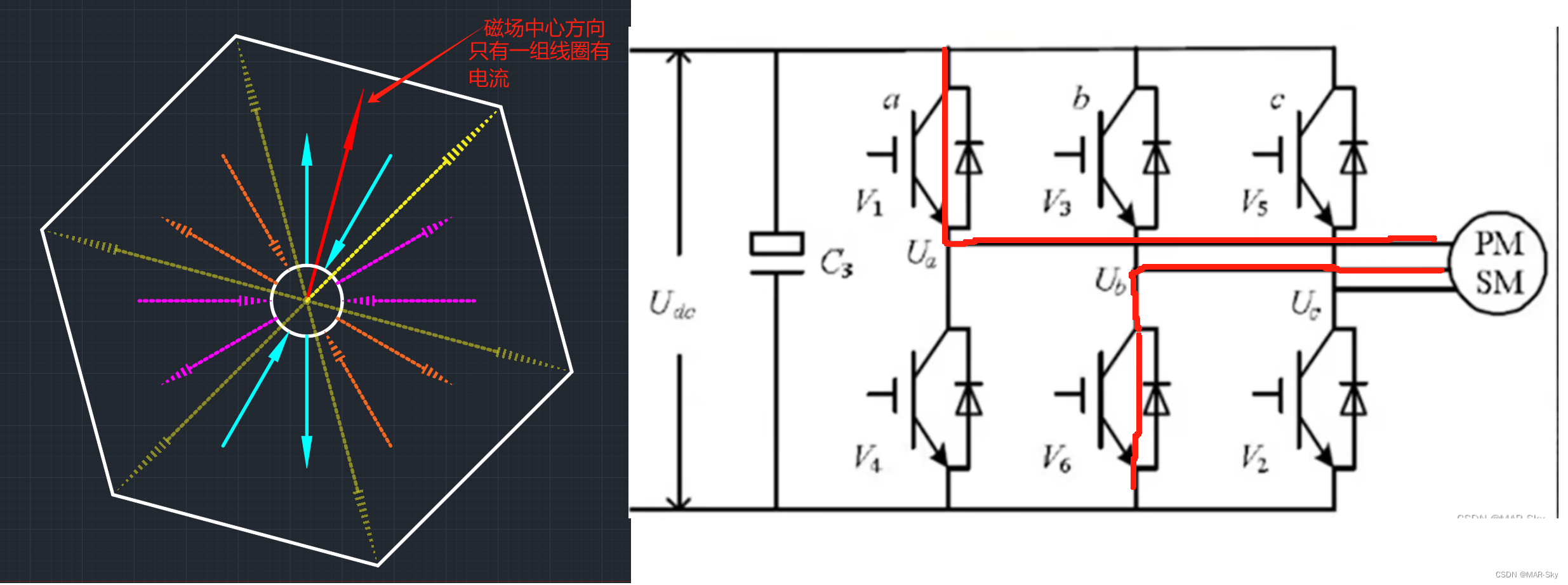
下图是当3组开关中的3个导通时,磁场可能的方向。只要3条引出线能接通到电源,必定有2个线圈是导通的。按照一定规律可实现下图中的磁场方向。
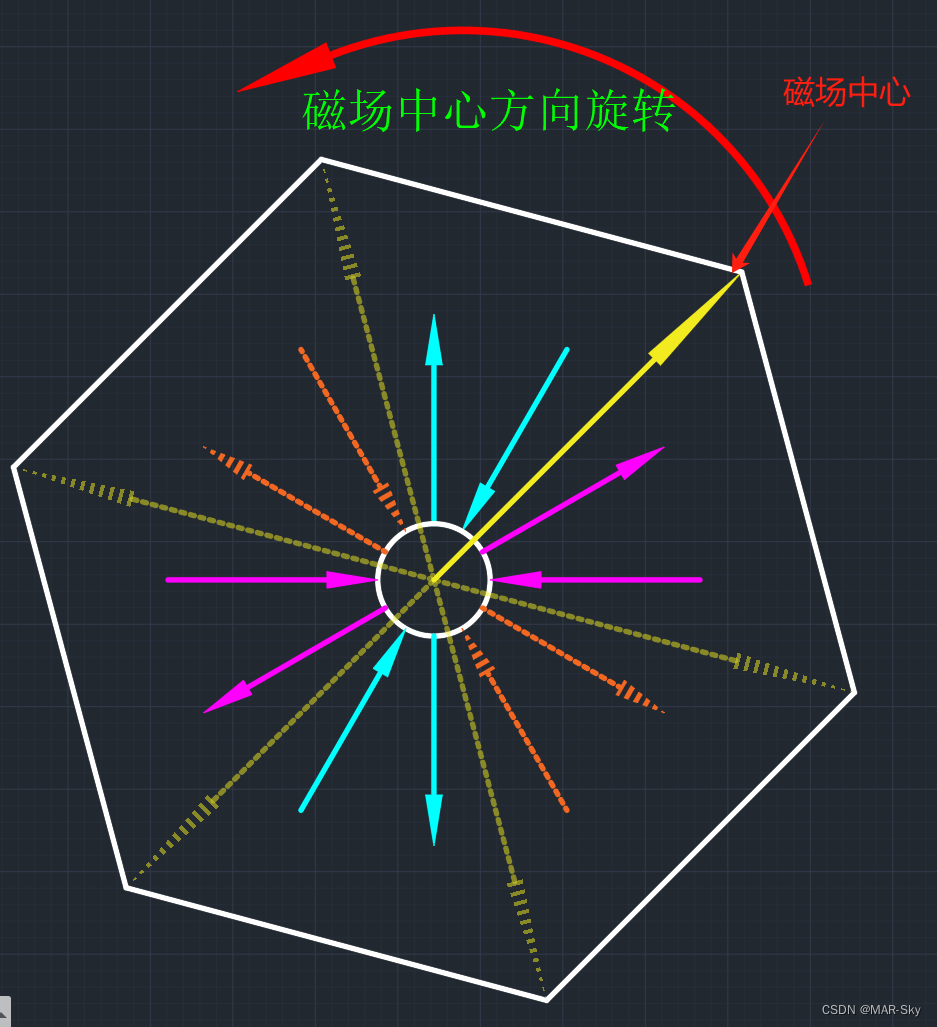
考虑到上图中的磁场中心方向是以60°间隔相邻,那么在开关时会发现力矩的不稳定,顿挫感或颗粒感就是这个原因。
个人猜想在两磁场中心方向变换的过程中添加一个只有一个线圈组提供动力的过程,如下图,这样是可以减少颗粒感,但还是存在,就像是步进电机中,使用4步和8步都可以让电机转动,但8步的运行更稳定。
SVPWM技术
先了解脉宽调制的发展过程,PWM,SPWM
PWM
Pulse Width Modulation就是把高低电平占用的时间比不同,一般又叫做占空比。这样波形周期的高电平占整个周期的比例越大,整个周期的功率就越大,这样可以控制直流电机和灯光亮暗。但在工作周期内一般都不改变占空比,这和后面的SPWM有不同,为了完成等效的正弦波对应的矩形波,在一个三角波周期内一般都会变化。
SPWM
参考1,参考2,参考3
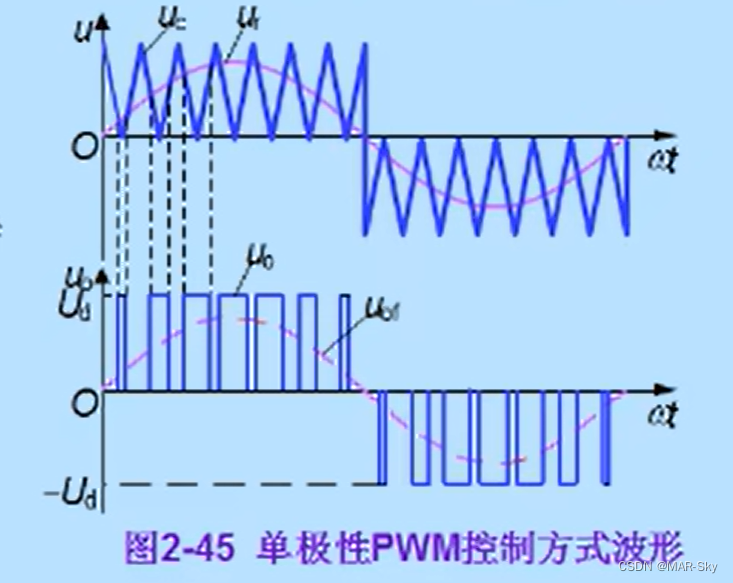
SPWM的目的就是根据面积相等得到能够等效于正弦波的矩形脉冲。SPWM(SIN Pulse Width Modulation),矩形脉冲波形所围成的面积等效于正弦波和坐标轴围成的面积相等。通过比较三角波和正弦波得到对应时间的矩形波。三角波大于正弦波则矩形负电平,三角波小于正弦波,矩形正电平 。
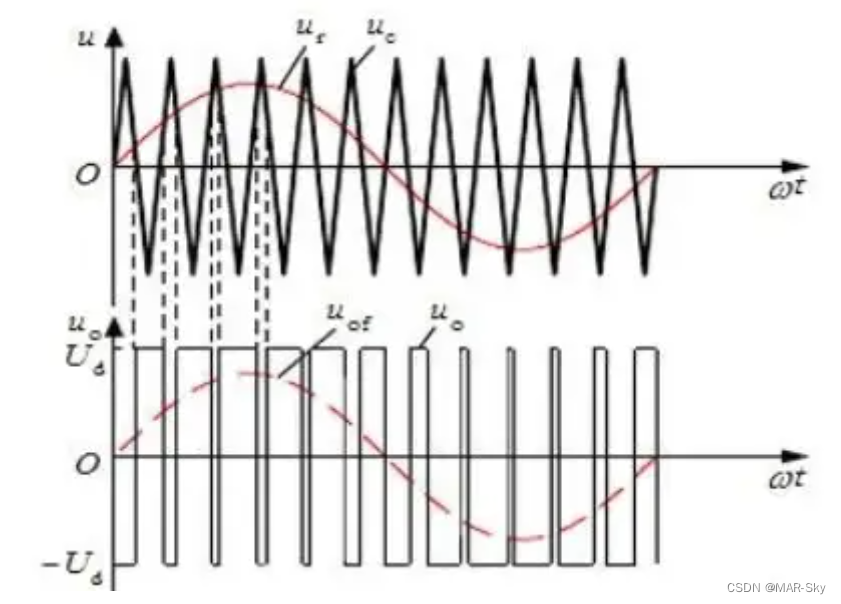
不同的调制方式,其中正弦波称为调制信号(目标信号),三角波(锯齿波)称为载波,
SVPWM
(Space Vector Pulse Width Modulation)即:空间电压矢量。个人理解就是控制电机转子磁力方向和大小的pwm。联系前面的clak和park变换中可以更好的理解svpwm 。
下面的6个mos管能够控制8种状态,实际 只需要考虑上面3个就行,为了得到最大力矩,一般设置两组线圈通电,而且上下桥臂不能同时通电。所以当上面三个mos管开关状态确定后,对应下面的mos管状态也确定了。以上桥臂的三个mos管为例,组合就有23=8种。例如,当上面有一个mos打开,那么下面对应有两个打开。
但当上桥臂全部关闭和全部闭合时,电机线圈会出现完全断路的状态,这时候也不会产生力矩。
根据上面的分析,那么导通有力矩的6个状态,如下图中的U1-U6,对应转子线圈有力矩的情况。那么只是保持某种状态的导通,结果会出现沿着六个方向的力矩,而其他方向的力矩无法产生的问题。
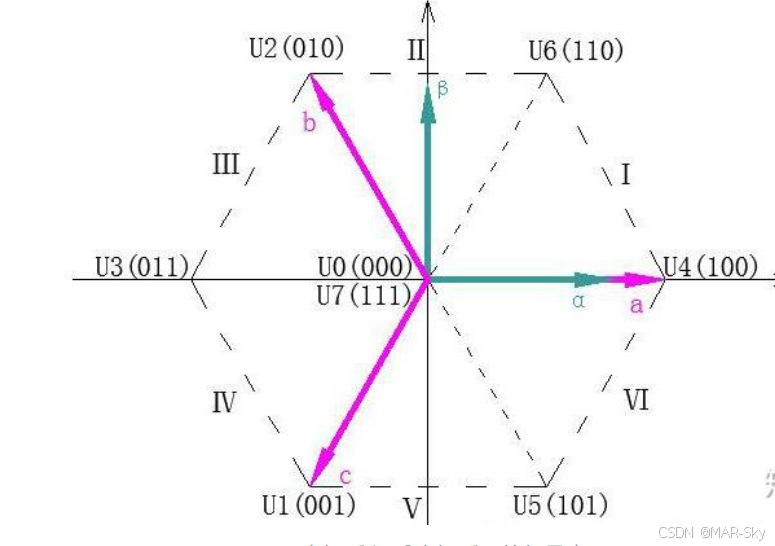
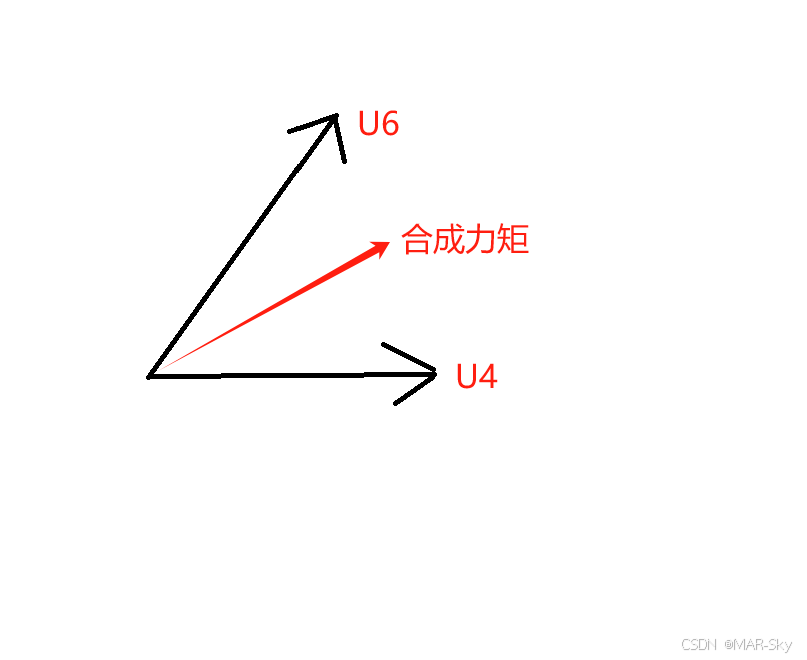
以上图种的U4和U6为例,想要得到两个力矩方向之间的力矩,就需要控制两个力矩的产生时间。如下图,若想得到中心方向的力矩,修改U4和U6通电时间。可以发现的是,这个力矩大小不可能超过单独一种状态下的大小,因为这是两个力矩非同一时间的叠加效果。但高频的通电线圈确实达到了力矩稳定在一个任意角度的结果。这样通过么个状态的pwm也确实完成了电机的控制,也就是svpwm。


















 1687
1687

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









