







LearnOpenGL学习笔记—入门06 附:关于四元数
关于四元数
避免万向节死锁的真正解决方案是使用四元数(Quaternion)
本节关于四元数的理解以及它对三维旋转的作用,主要对3Blue1Brown的视频进行了描述和理解,可以从这两个视频找到它:四元数的可视化,四元数和三维转动
官方网站是这里,有互动视频可以实操一下。
1 四元数的可视化
这个视频中,3B1B给我们建立了直观印象,看四元数对四维空间都干了什么,以此来可以更好理解四元数的公式
视频中分了以下几个主题展开
- 1.怎样让一个只能理解一维的人来理解复数
- 2.向只能理解二维的人描述三维旋转
- 3.在三维的约束下,表现四元数在干什么
1.1 从一维到复数
假设一个一维人,“小莱”,它只能理解一维几何和实数,我们向他描述复数。
我们可以选择纯代数的方法来定义复数。
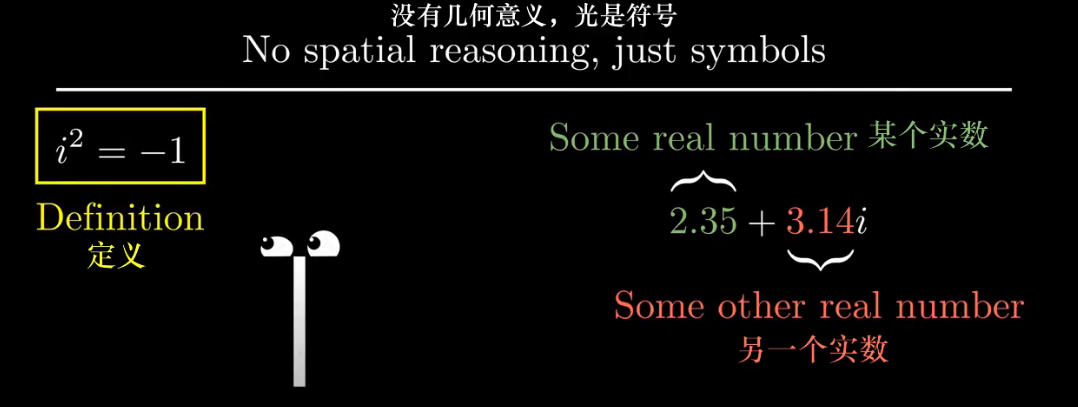
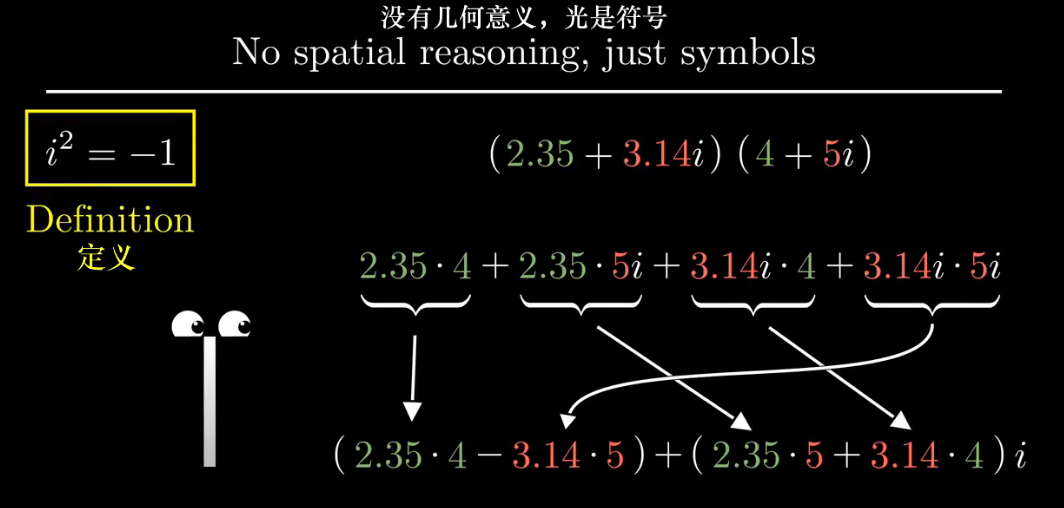
以及定义复数的乘法
但是这样,“小莱”并没有清楚复数的意义在几何和空间直觉,它那非常有用的作用究竟是什么。
1.1.1 左为变换作用,右为点
我们作为理解二维空间的人,可以这么理解复数乘法
- 如下图的Z·W,我们可以把Z看成是对这个平面的一个变换,1通过这个变换得到了Z,而0通过这个变换则没有改变
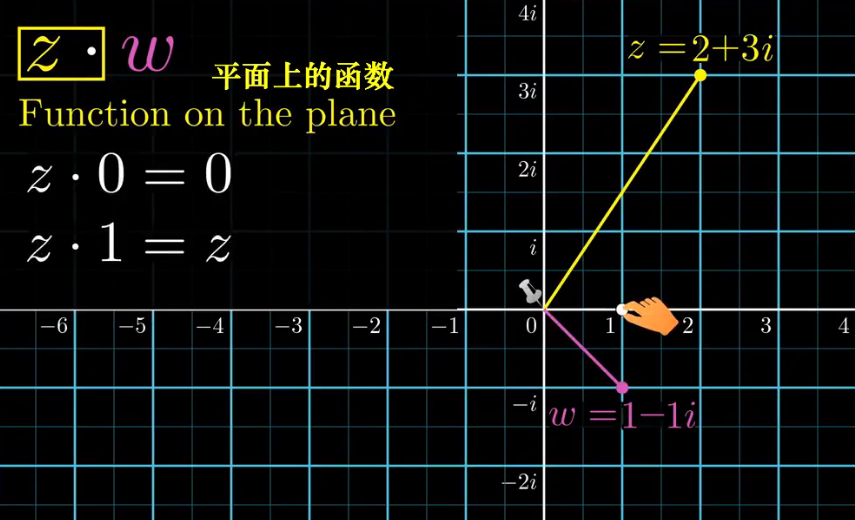
- 于是Z·W,是让W以及它所在的平面进行了这么个变换,得到了对应的结果,并且在二维空间中有且只有这一种拉伸旋转(Z这种变换)才能做到。
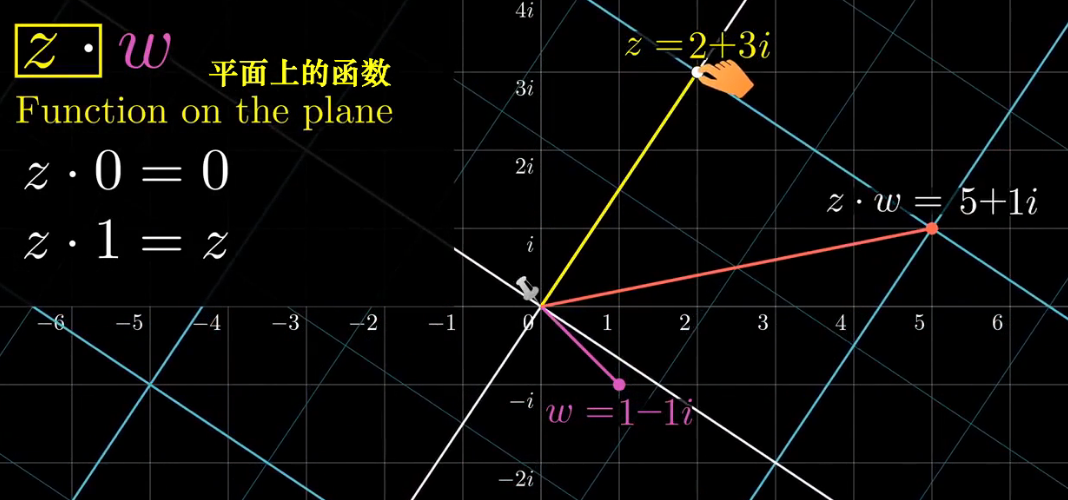
我们在接下来理解四元数乘法时,也需要用到这种思想,即左边是一个变换的“函数”,去变换右边的数,并且理解左边的这个“函数”,是怎么变换整个空间的。

对于复数是一种“作用”的理解,可以点击这里进行复习。
1.1.2 从一维看旋转?
现在回到“小莱”的身上,作为一维人的它,非常熟悉拉伸的变换,也就是实数的乘法。
多维上,每一维度的变换本质上没什么不同,“小莱”都可以理解,难的是如何和“小莱”介绍旋转。
比如复平面上的单位圆,上面的点到0的距离都是1,所以乘上这些点就对应着纯旋转,我们要如何对“小莱”解释这些复数乘法呢?
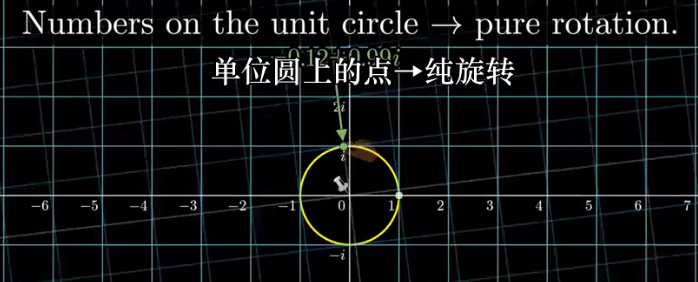
我们可能会觉得很难考虑,毕竟旋转是一个二维的东西。
但是旋转只有一个自由度,只有代表角度的数字,每一个角度唯一确定一个旋转。
所以所有二维旋转的集合可以把它映射到一维的数轴上,那里就是“小莱”的家。
如何进行映射,有很多方法,这次使用的是“球极投影”。
球极投影可以将圆映射到直线,球映射到平面,乃至四维超球到三维空间
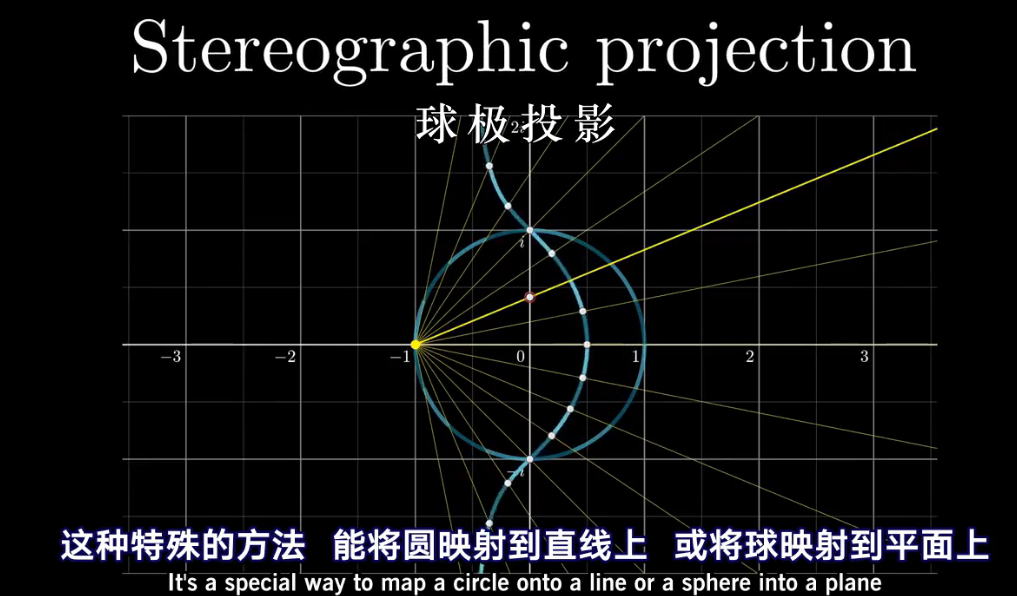
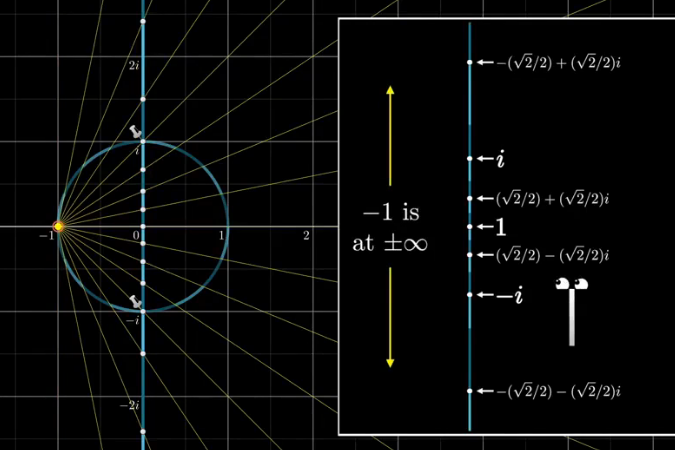
1.1.3 球极投影
从-1出发做直线,穿过单位圆上的每一个点,取这条线与纵轴的交点,这便是圆上的点被投影到的地方。
- 点1被映射到直线的中心保持不动,i与-i也是如此。
- 从i到1上这个90度上的所有的点,被映射到,1的对应点和i的对应点之间。
- i到-1这个圆弧上的点,则被映射到,i的对应点与正无穷之间。
- -1到i的圆弧上的点,则被映射到,-i的对应点与负无穷之间。
- -1本来不会映射到上面去,但是我们可以说,-1被映射到了无穷远的点上,无论沿着什么方向,走到无穷远就能看到-1对应的位置。
而这组由映射点组成的线,就是“小莱”能看懂的东西了。
这根线,仅仅是复数中距离原点长度为1的那些,即单位圆,其他的复数比如0,1+i,2等等,“小莱”并看不到。
但是没有关系,我们要做的,只是让“小莱”了解那些乘法中代表旋转的复数Z,所以只需要理解单位圆就可以了。
在圆上的旋转作用,映射到线上成为了变形的效果。
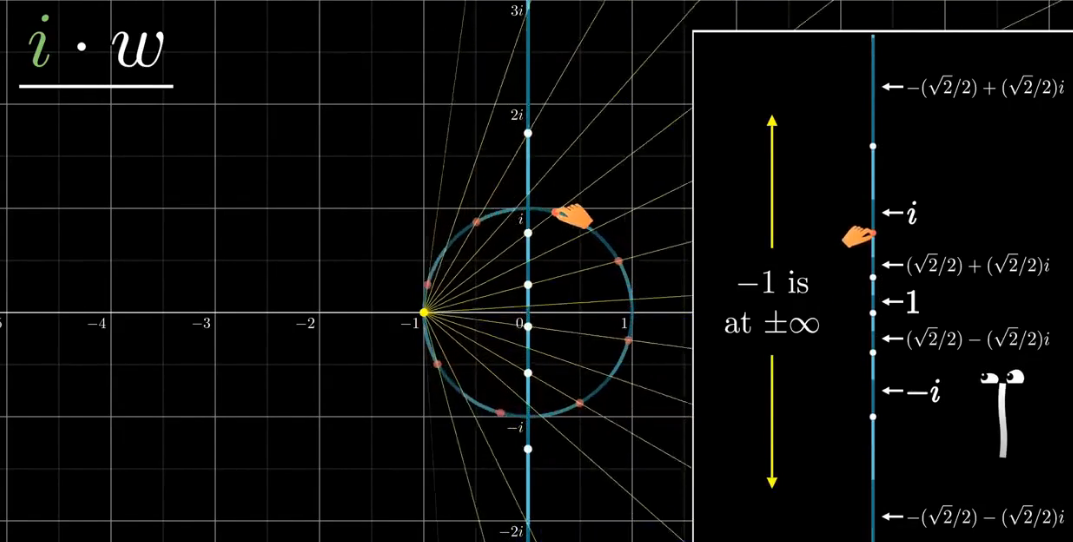
- i·1=i → 1这个点进行了i这个变换(逆时针90度),对应到线上,1这个位置的点移动到了i的位置上。
- i·i=-1 → i这个点进行了i这个变换(逆时针90度),对应到线上,i这个位置的点移动到了-1,即移动到了无穷远。
- i·-1=-i → -1这个点进行了i这个变换(逆时针90度),对应到线上,-1这个位置的点移动到了-i,即从无穷远移到了-i。
- i·-i=1 → -i这个点进行了i这个变换(逆时针90度),对应到线上,-i这个位置的点移动到了1的位置上。
虽然是有些奇怪的运动,但是我们依靠这个方法传达了一些思想,比如,被i连乘了四次,对应着转了4次90度,我们会回到原来的地方。
1.2 从二维到球体旋转
下面的这个纸片人“小菲”,它只能理解二维的几何,想象一下我们要如何向它解释球体的旋转
为了从二维的旋转过渡到四元数,我们拓展一下复数,在水平的实数轴和垂直的虚数轴上,加上第三条轴
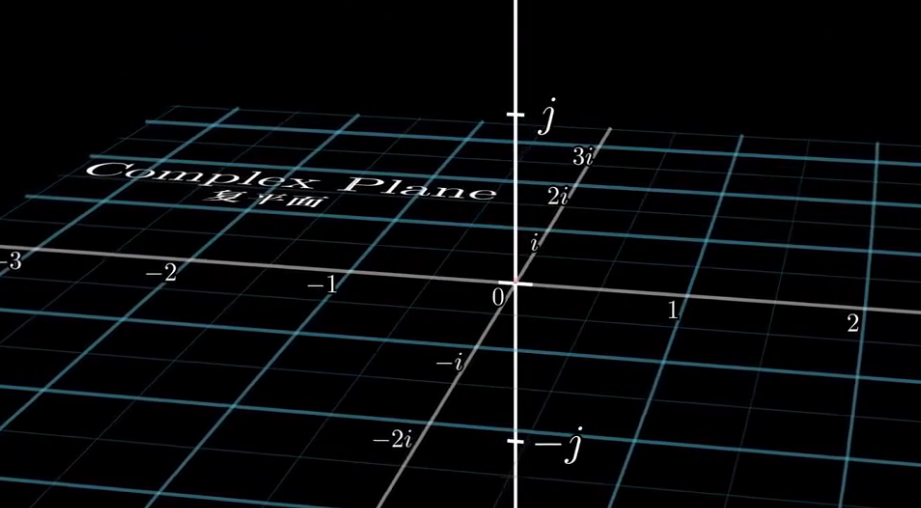
我们让ij成为xy轴,实数轴则对应到Z轴的方向。
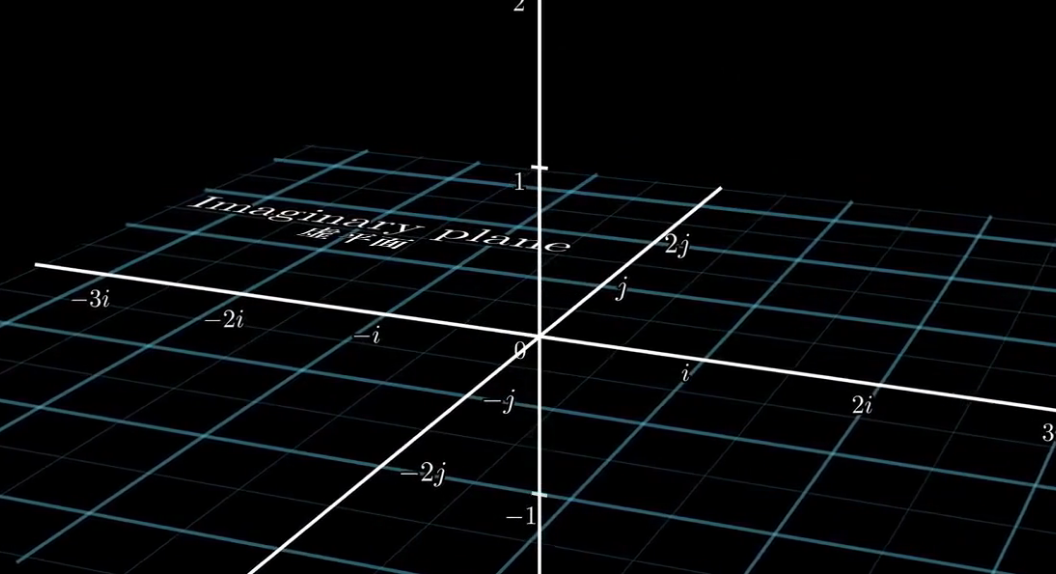
- 这时候三维空间中的点,都可以用一个实数,加上另一个实数乘以i,再加上另一个实数乘以j来表示,如1.25+1.5i±j。
然而想要为这样一个三维数系定义一个乘法概念,让它满足平时的代数性质来构造出有用的乘法,根据群论的知识,这样构造出来的乘法是不封闭的,所以我们无法定义。
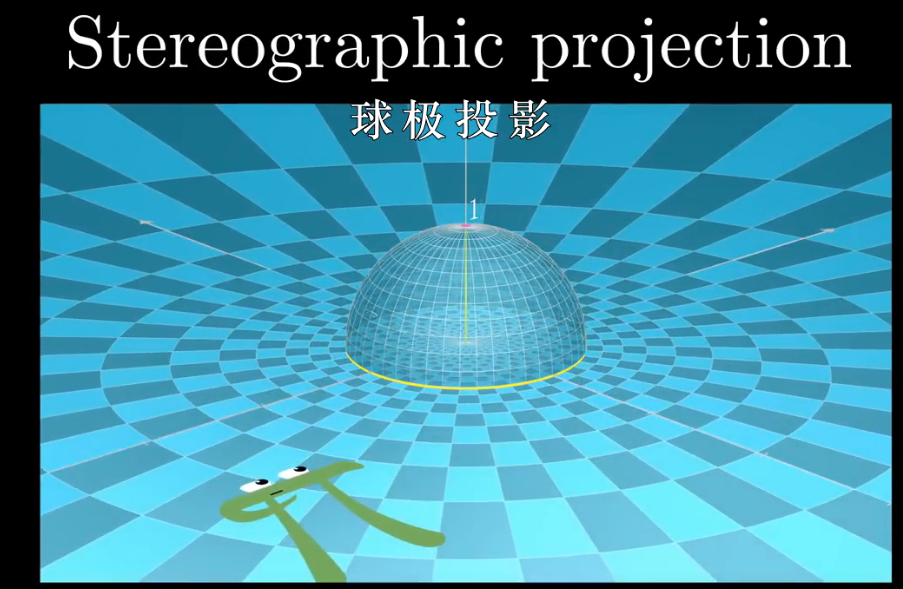
我们想象一下向纸片人“小菲”描述这个坐标系中的三维旋转,单位球由所有到原点距离为1的数组成,即他们坐标的平方和为1。
我们无法把三维旋转给“小菲”看,但是我们可以把这个球的二维投影进行展示。
从南极处的-1开始,做一条直线穿过球上任意一点,这条线和ij平面的交点,就是球上该点的投影。
- 北极的1来到了平面中心,北半球的点映射到Ij平面上的单位圆内部。
- 通过i,j,-i,-j四点的单位圆映射后原地不动,这也是“小菲”和我们都能看见的,真实的单位球的一部分
- 所有南半球的点被映射到单位圆之外,同样的-1我们定义它被映射到无穷远
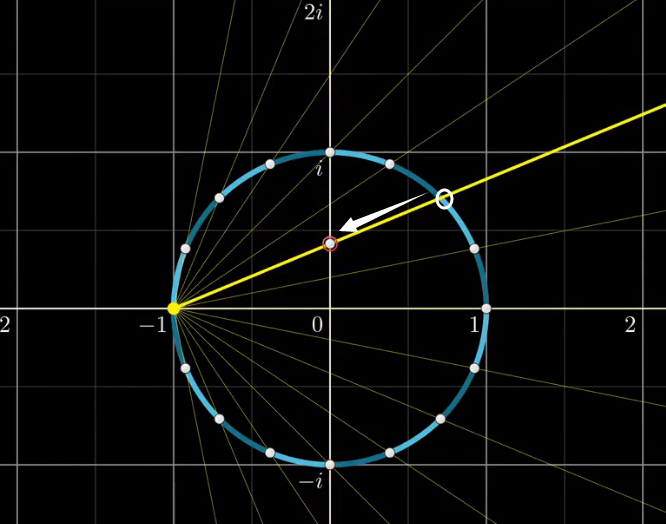
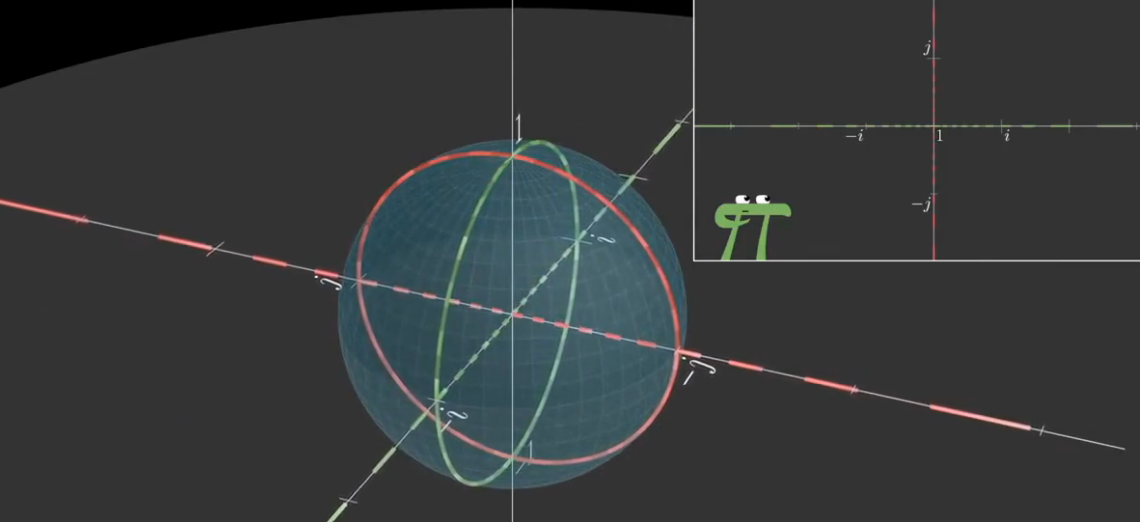
以下是映射图,粉色点代表北极旋转后的位置,黄色的圈代表赤道投影
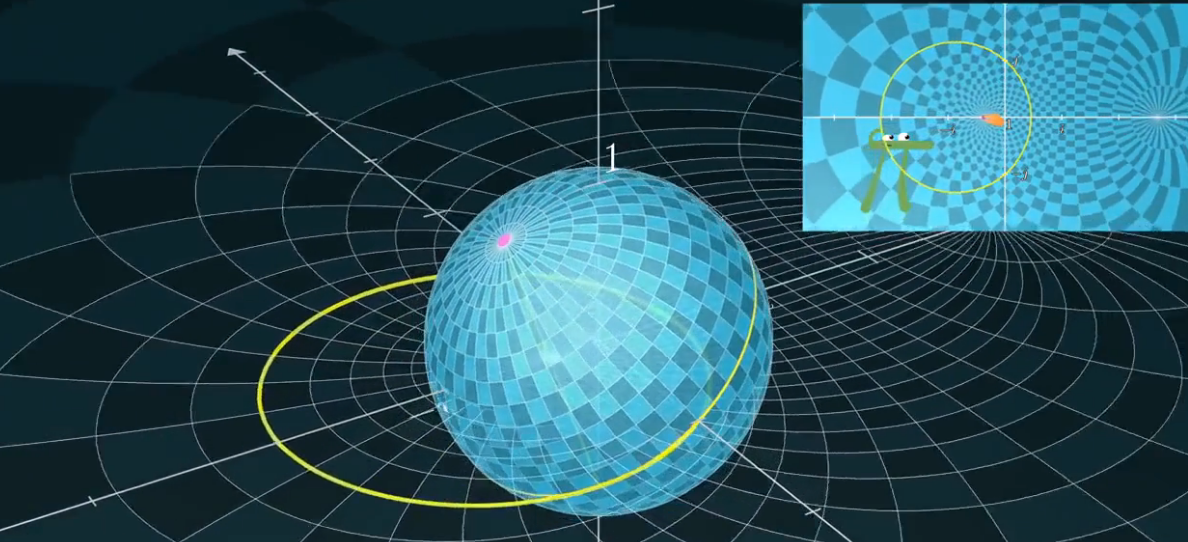
我们可以关注于几个关键的参考点来识图追踪整个球体,
经过-i,1,i,-1的单位圆,映射到了“小菲”所在的 虚平面的 i轴
同时我们只是投影了单位球上的点,在三维真正的i轴上的点大部分是看不到
同样的我们把经过1,j,-1,-j的单位圆,映射到了“小菲”所在的 虚平面的 j轴
- 通过推理可以知道,“小菲”所在的平面上任意一个直线,都是在球面上过-1的圆的投影,某种意义上说,所有直线都是一个过无穷远的圆
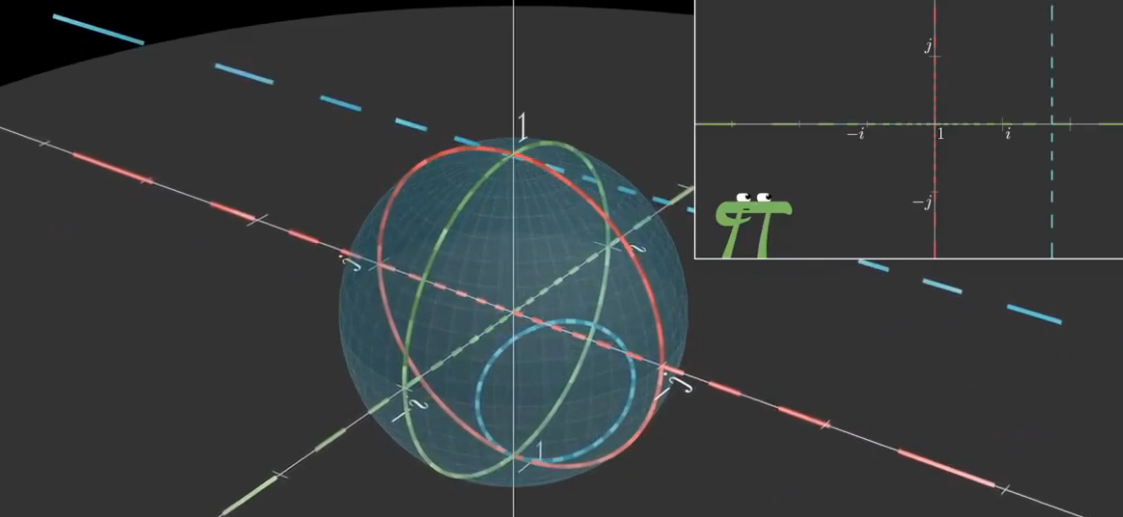
- 想象一下在“小菲”的视角中,把球体绕j轴旋转,我们把ij单位圆转到1j的单位圆
在小菲的眼中就是,黄色的单位圆变成了垂直线,而红色的线变成了单位圆
我们看到的是旋转的运动,在“小菲”看来,就是比较扭曲的投影效果,从单位圆到水平直线的变化
1.3 三维人看四元数
1.3.1 四元数
复数有一个虚部,不存在的“三维复数”有两个虚部,四元数则有三个虚数维度
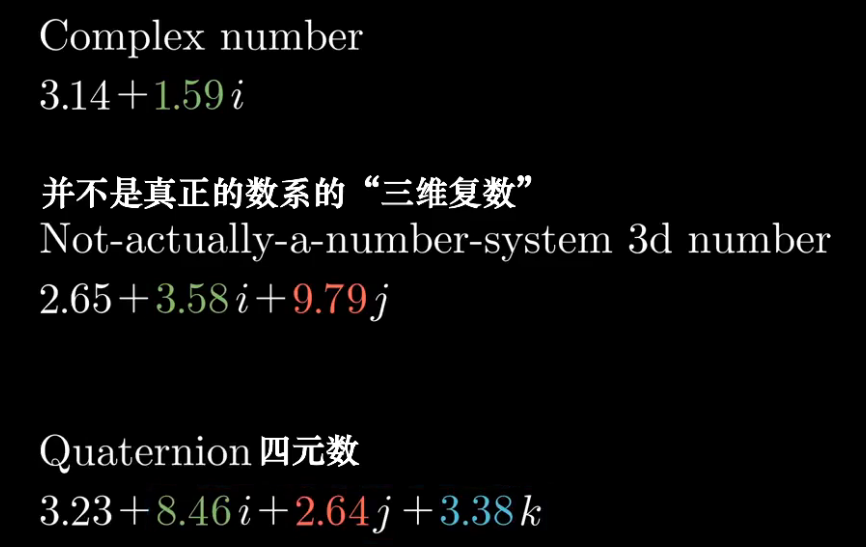
这三个虚数维度都和实数轴垂直,同时它们自己也互相垂直
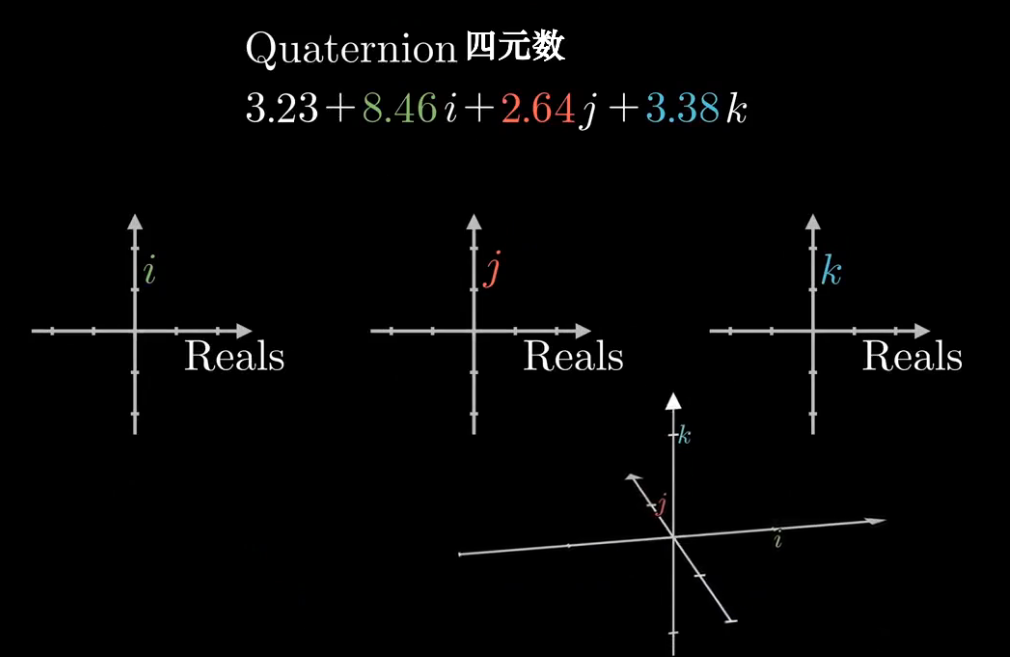
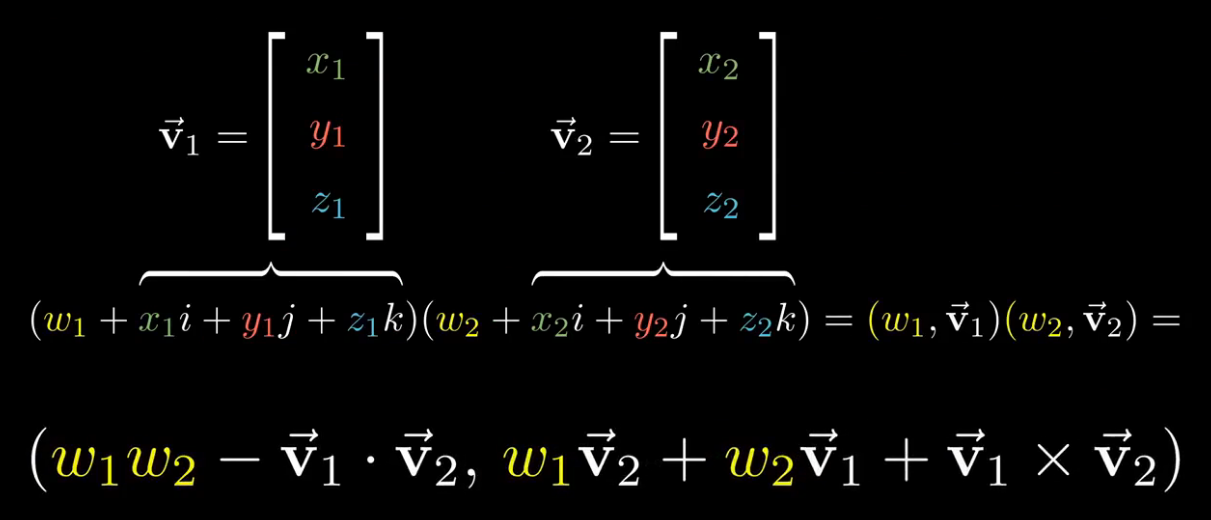
四元数有四个实数,可以把它拆解成一个实部/标量,加上一个三维的虚部。
这个三维的虚部,即没有标量部分的四元数,也就是向量(vector)。
我们可以直接定义出四元数乘法,给出ijk的乘法规则,规定它们满足分配律的方式。
这也是我们告诉计算机来算四元数的方式。
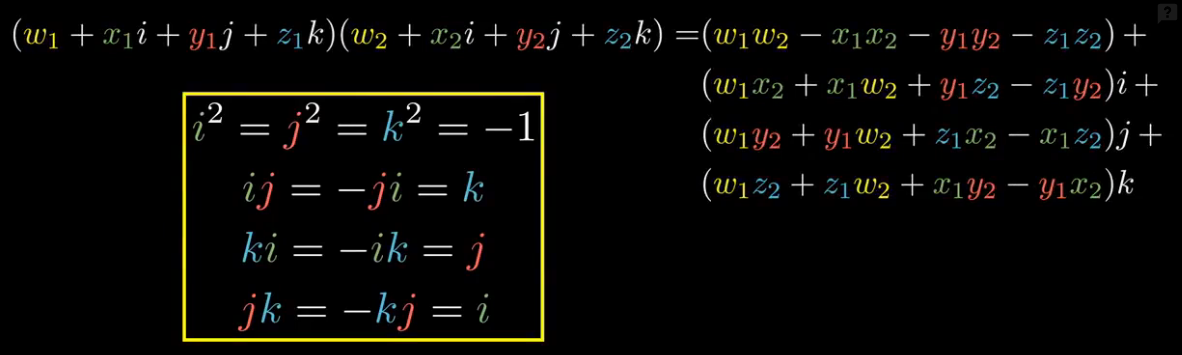
对于矩阵乘法,四元数乘法更加简洁,所以它在图形学编程和其他领域十分有用。
我们也可以用点积和叉积的形式来表示
1.3.2 四元数的球极投影
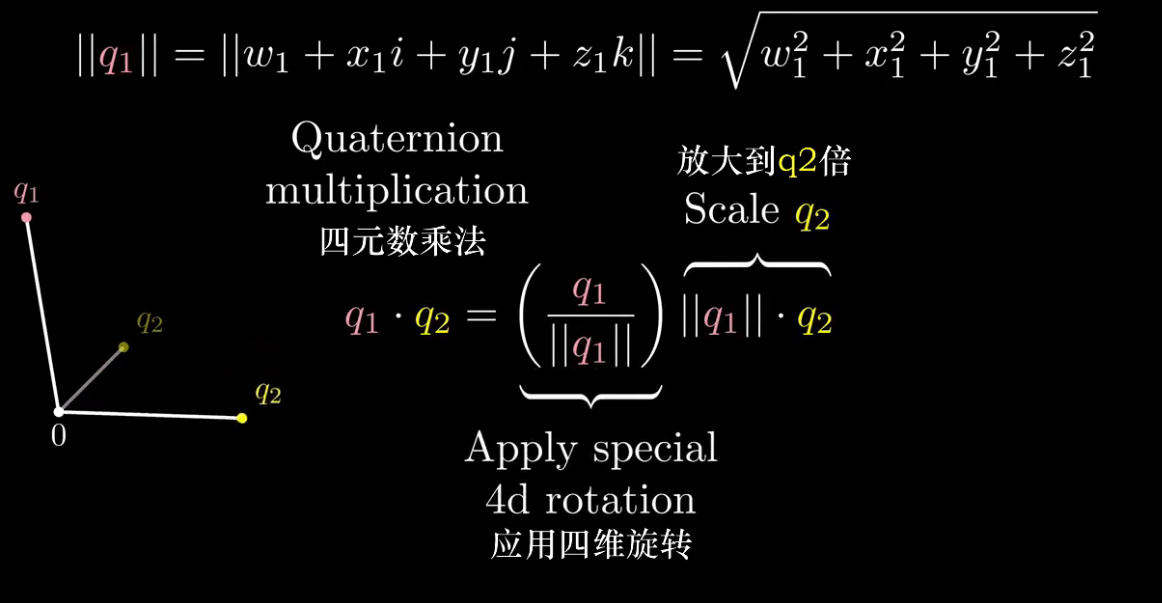
但是正如深入理解复数乘法需要理解它的几何意义——乘一个复数代表进行了一个缩放与旋转的变换,我们需要明白四元数乘法的四维几何意义。
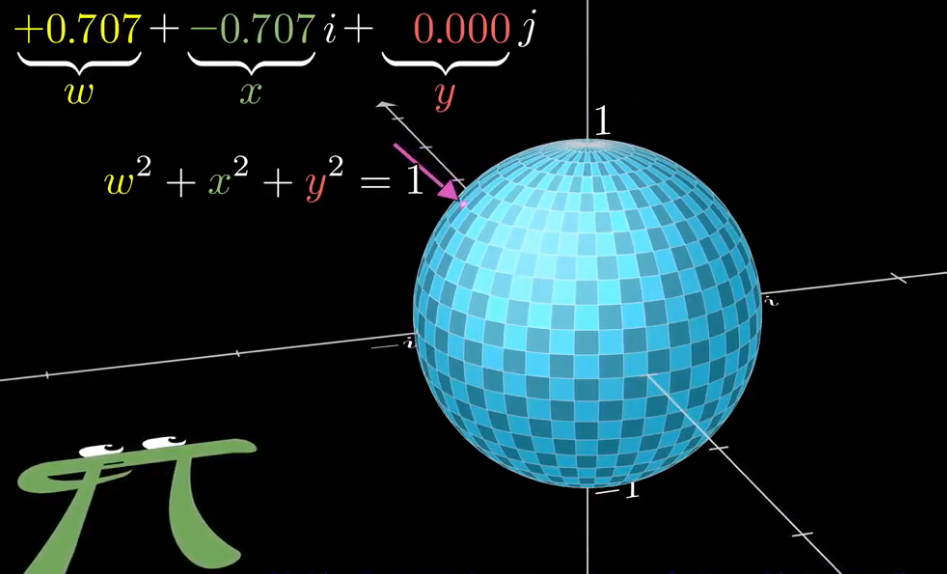
与二维类似,四维上的点到原点的距离,依然是每个分量进行平方和后的平方根。
四元数乘法,我们可以理解为,先对四元数进行了放缩,然后进行旋转。
这个特殊的四维旋转规则,就是我们要理解的内容。
(下图字幕应为放大q2到q1)
与之对应的是到远点距离为1的四元数组成的四维超球,与之前从一维理解旋转,到二维理解球体,如今我们需要用三维理解四元数。
不仅仅是因为,四维单位超球上的点的乘法是纯粹的四维旋转,而且也因为我们可以跟踪四维超球上的一些点,来理解这种四维作用,而不需要去理解整个四维空间的所有点。
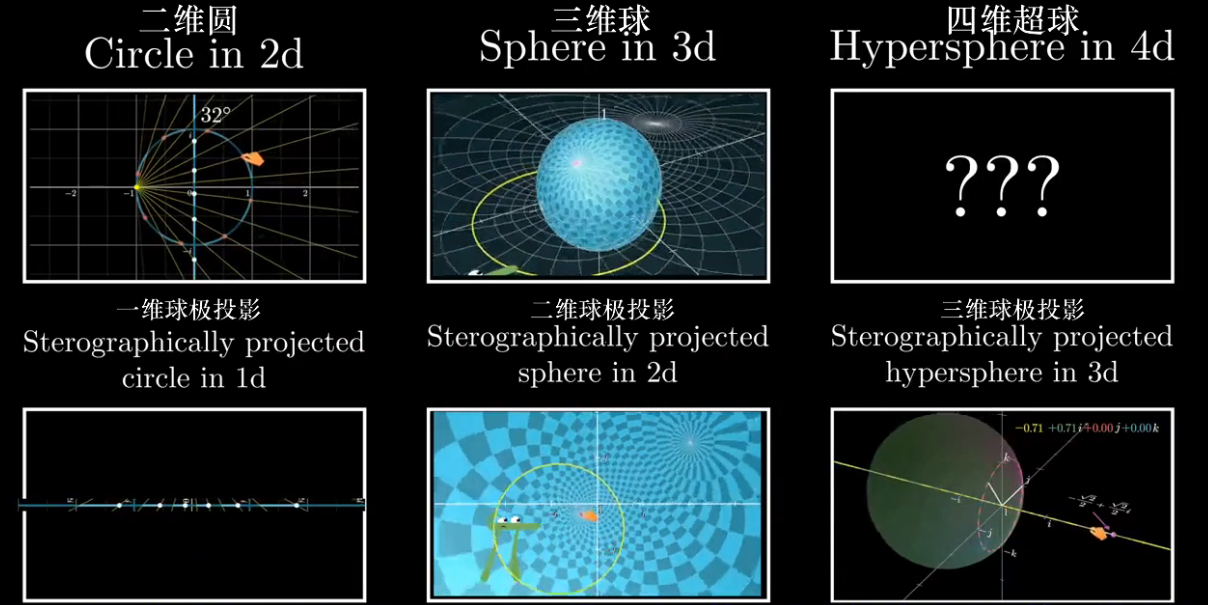
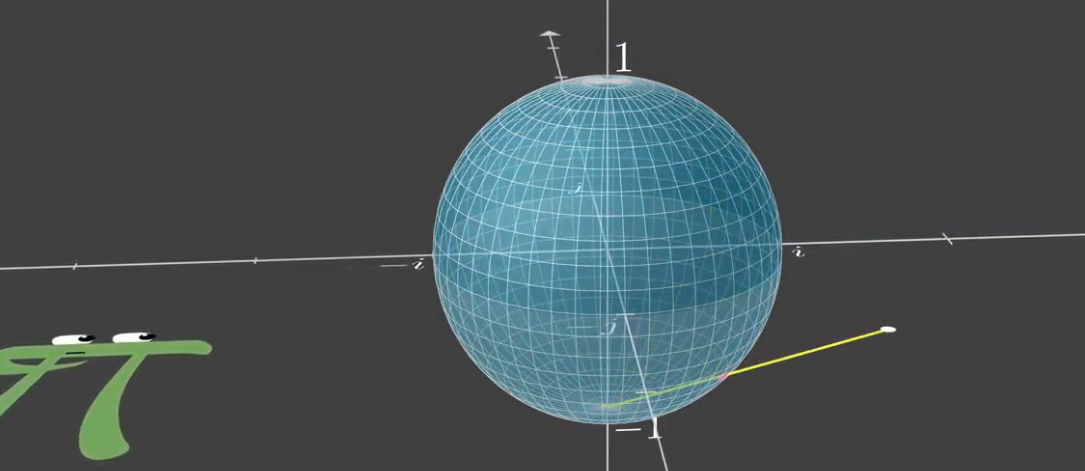
就像之前的投影,我们把四维超球投影到三维空间来。
按照之前的规律,1这个点,来到了投影空间的正中
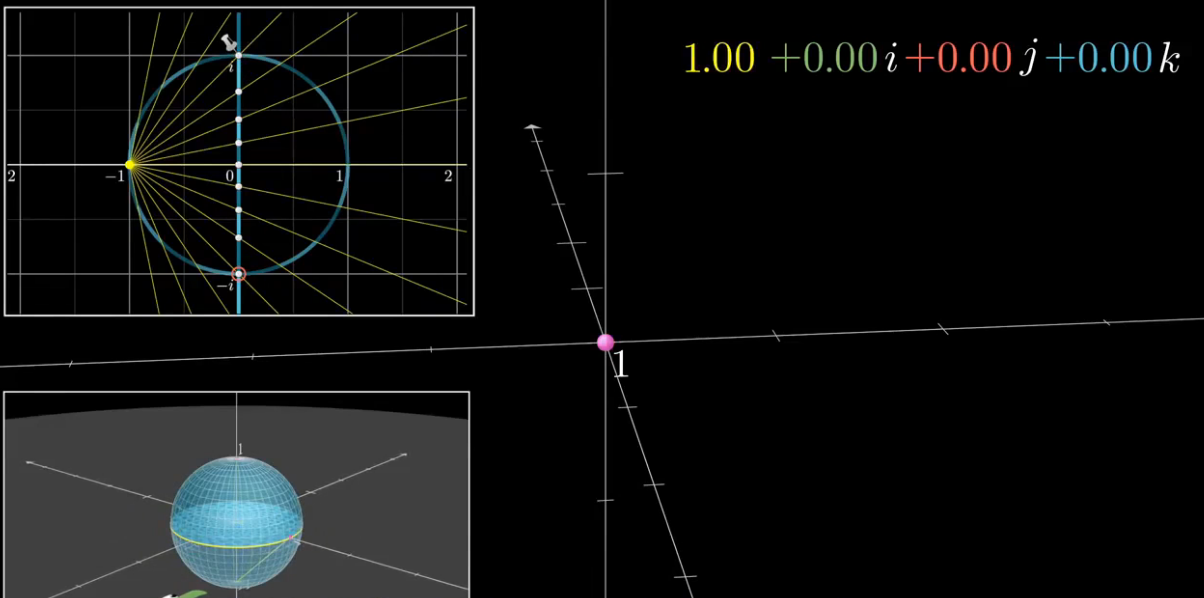
并且正如
- 投影过后,在i这个轴上的点,在线人“小莱”的空间保持不变,即实部为0,虚部的部分
- 投影过后,在ij平面的单位圆,在纸片人“小菲”的空间保持不变,即实部为0,虚部的部分
那么投影过后,在ijk空间的单位球,在我们三维人的空间保持不变
所以我们在三维空间看到的单位球,代表着四维超球投影到我们空间时,不变的那一部分,即实部为0,虚部的部分。
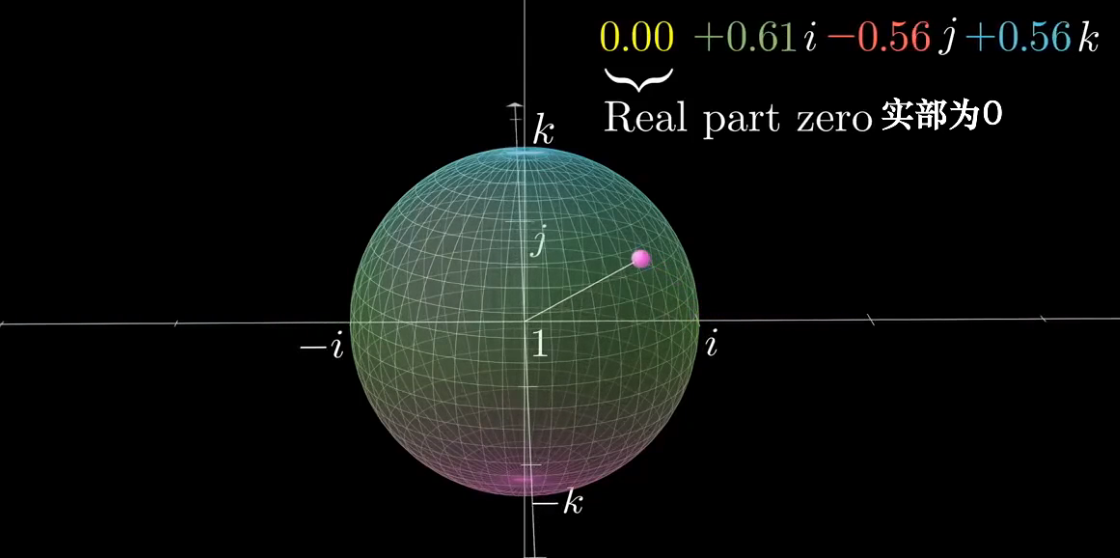
这个单位球代表着四维超球上所有实部为0的四元数,也被数学界称为单位向量
- 那些实部为0到1的单位四元数,投影到了球的内部,靠近中央的1
- 实部从-1到0的单位四元数,则投影到球的外部
- -1这个点坐落在无穷远处,从任意一个方向都能走到
- 整个三维空间,都是一个四维单位超球的投影,只包括了满足四个分量的平方和等于1的四元数。
所以三维空间上的每一点,所对应的四元数都有着同样的模,即在四维,它到0的距离都是1。 - 除此以外的其他四元数,我们看不到
- 与之前纸片人一样,每一个线,代表了一个过-1的圆
- 每一个平面,代表了四维超球上的一个三维球
- 如果他正好是通过了1,i,j,-i,-j,以及-1的三维球,那么他就会被投影到我们所谓的xy平面
- 正如同过-1和1的圆,变成了过中心的所有直线→过-1,1的三维球的投影,就是过中心的所有平面。
- 由此也知道了,所有平面,都是四维单位超球上,过-1的三维球的投影。
1.3.3 四元数的乘法
现在取一个单位四元数,左乘另一个四元数,这种作用可以被理解为,两个独立的二维旋转,互相垂直,同时发生。
- 第一个例子 i乘以一个四元数
我们已经知道,i·1=i,也就是一维上,1这个点,会运动到i的位置(二维上的含义是,1这个点旋转到i),同样的i·i=-1等等
我们把他们看成数轴上的运动,1移到i,移到无穷远,移到-i,移回1
在上文“小莱”部分已经讲过,不再赘述
即数轴的移动,代表了经过球极投影的,在一个平面内的旋转
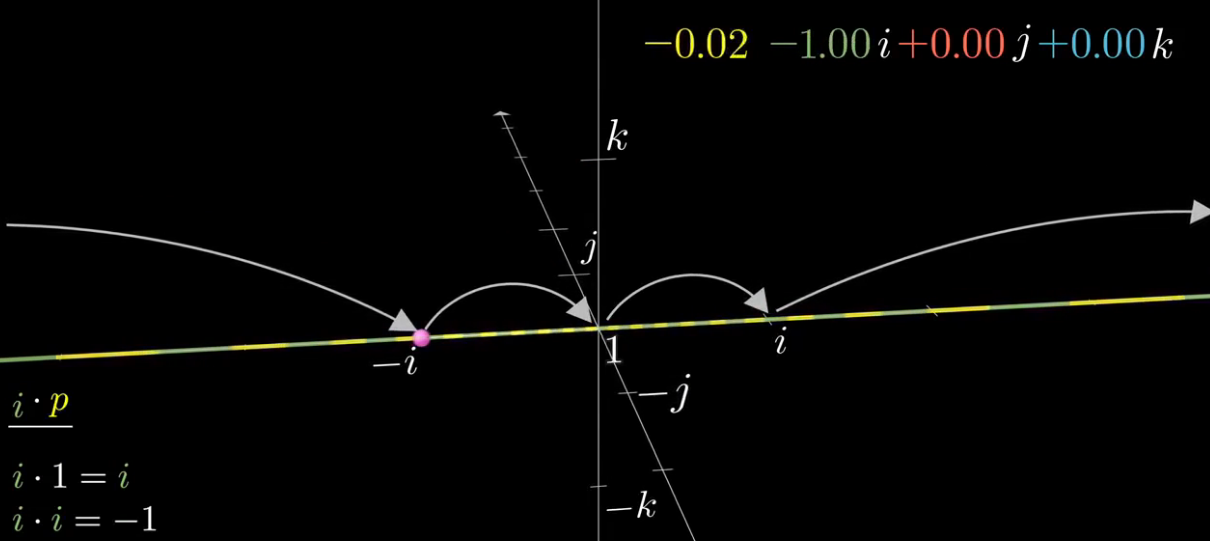
- 我们再来看通过j,k的圆,它垂直于通过1,i的圆(因为四维每两个面都互相垂直)
我们把这个通过1,i的圆,投影变成了一条直线(因为这个圆在实数轴和i轴的平面里,二维到一维投影完就是i轴,在四维到三维的投影中依然是i轴)。
在虚平面上的j,k圆,依然像个圆,但是复平面上的圆,就是一个线了。
所以以下是,两个圆的投影图
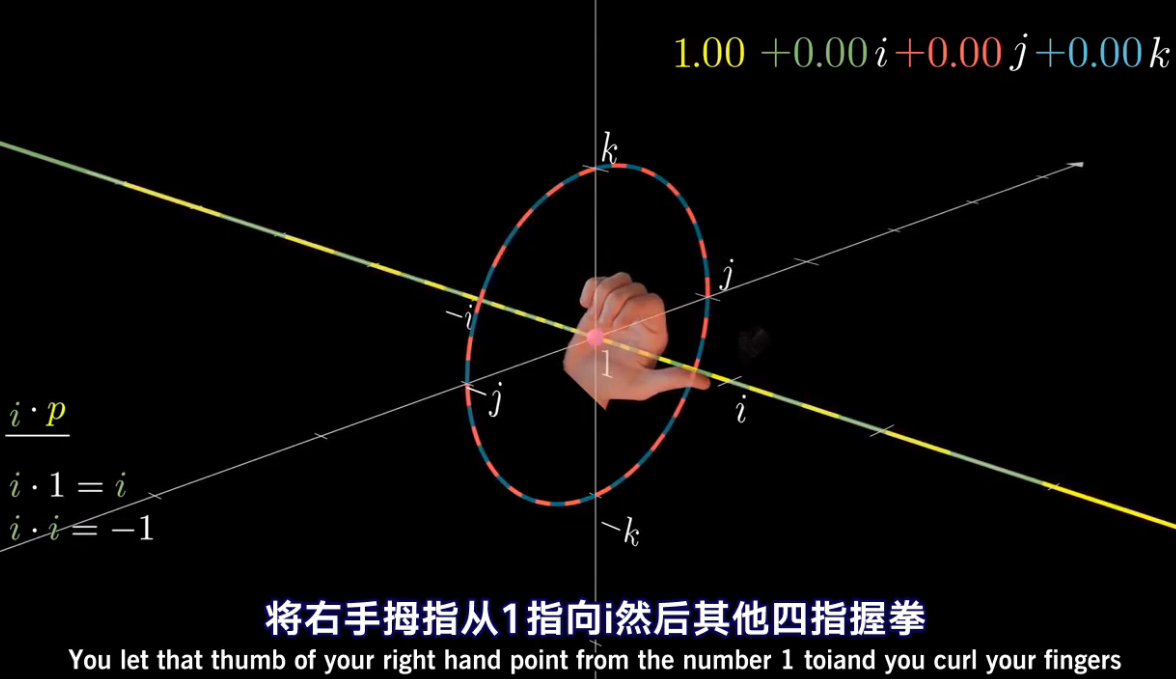
- 这就形成了一种很像右手定则的东西。
在这里我们先缓一下
一个二维的旋转,是两个互相垂直同时发生的一维的旋转
一个三维的旋转,也可以看成三个一维的旋转,或者一个二维的平面旋转加上一个一维旋转(如欧拉角)
一个四维旋转,可以看成两个互相垂直同时发生的二维旋转。
即上图中的两个投影出来的互相垂直的圆,同时发生旋转,一个在转,一个在数轴上移动
(为什么不选其他两个虚轴的圆呢,因为那样就没有右手定则似的东西了嘛~) - 所以此时我们再看四元数的乘法法则
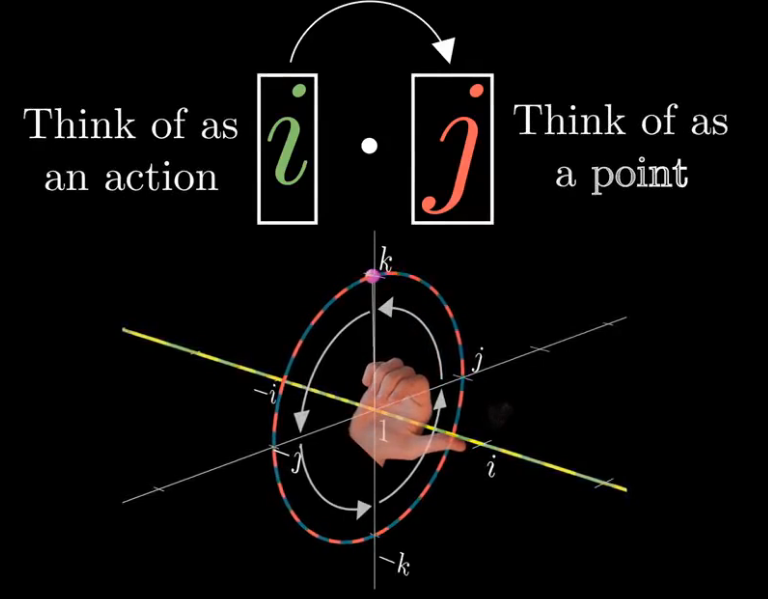
i·j=k 对j应用 i这个四元数旋转 会得到k
拆解成刚才的图,红圈j点转到k点转了90度,并且底下的线也进行90度代表的移动
i·k=-j i·-j=-k i·-k=j - 从计算方面
如果我们知道了一个四元数对1,i,j,k会做什么,那么我们也就知道了它会对任意四元数做什么,因为满足分配律。
线性代数的方法来说就是,1 i j k是四维空间的基,我们知道了对基的变换,也就知道了这个空间的变换。(线性代数也可以去看3b1b大佬的视频)
几何上,一个四维生物可以看到这个两个互相垂直的旋转的作用效果,并且它能知道这两个旋转唯一确定了一个四维超球的刚体运动。
到三维的投影就是一个球被里外里外的翻转了(在移动放大的同时在转)
经过四次迭代会回到原来的位置
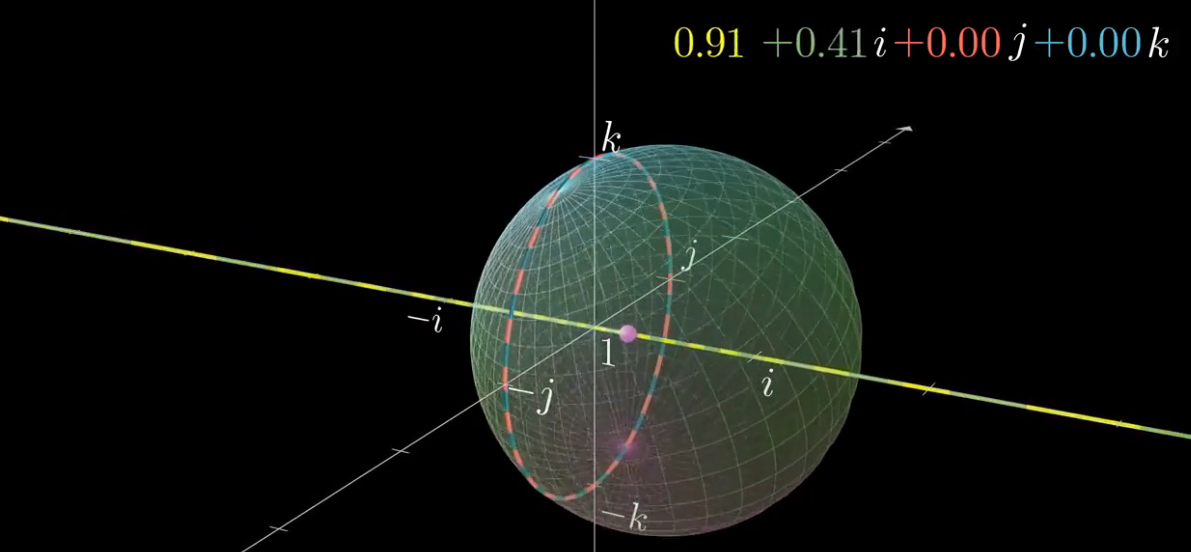
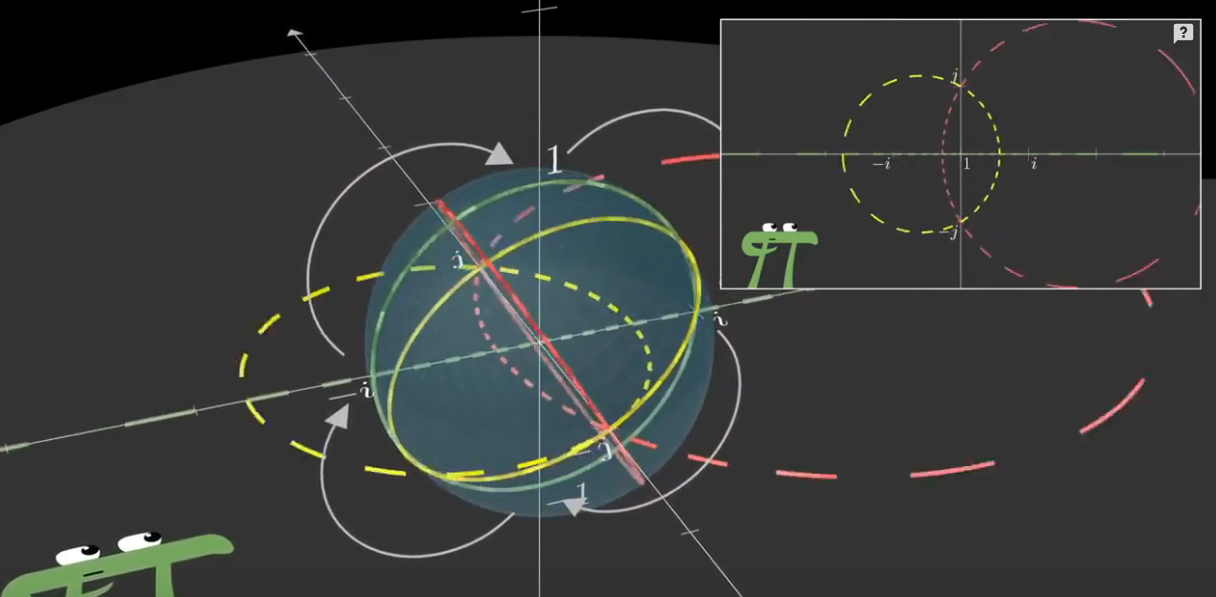
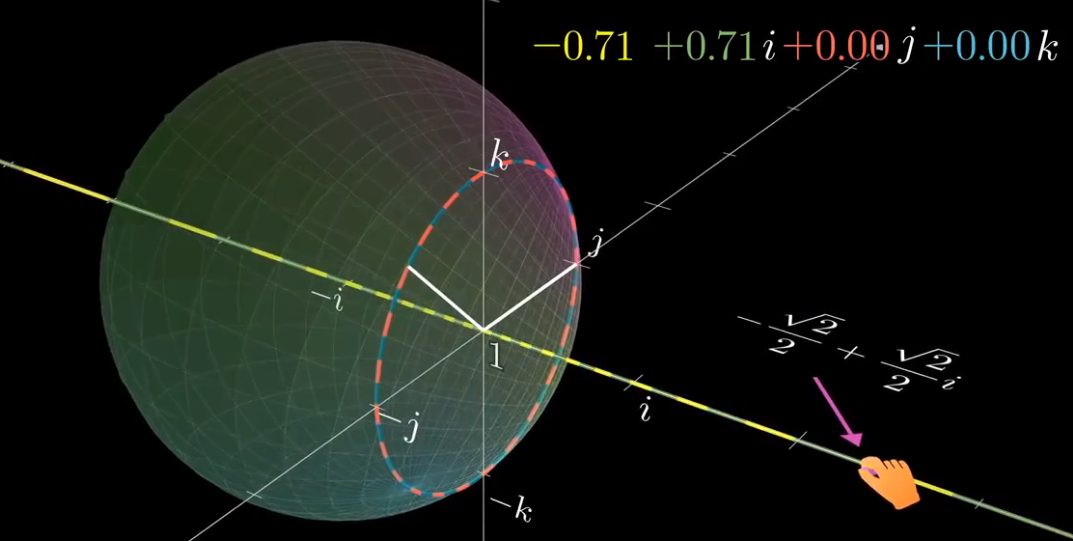
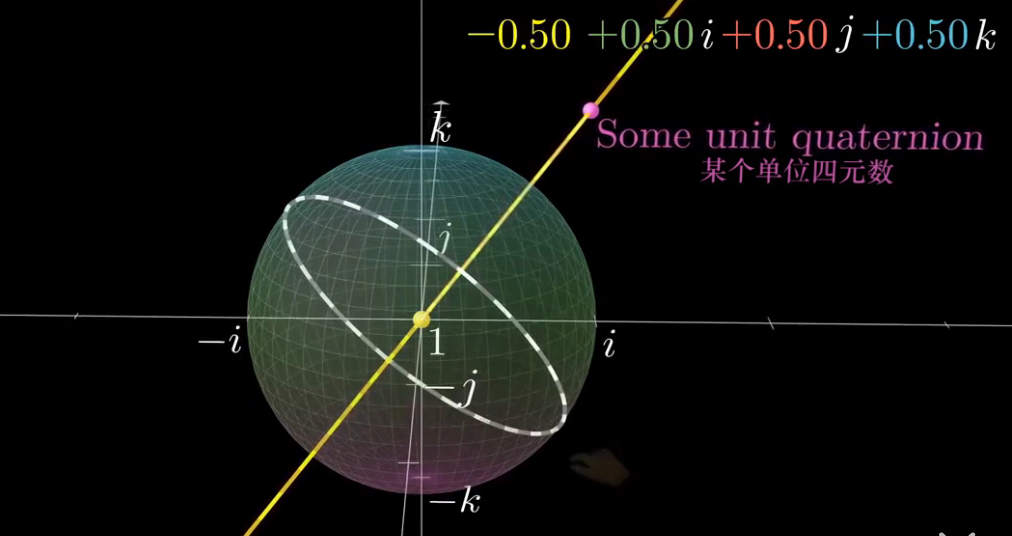
比如对下图中手旁边的这个四元数(注意,这是被投影过的,所以是数轴上的点,它本来是实轴和i轴这个复平面上的点)
这个四元数给其他乘上它的四元数所带来的变换,在我们看来是把1拉到它这个位置的投影,并且jk圆按照右手法则旋转了135度。
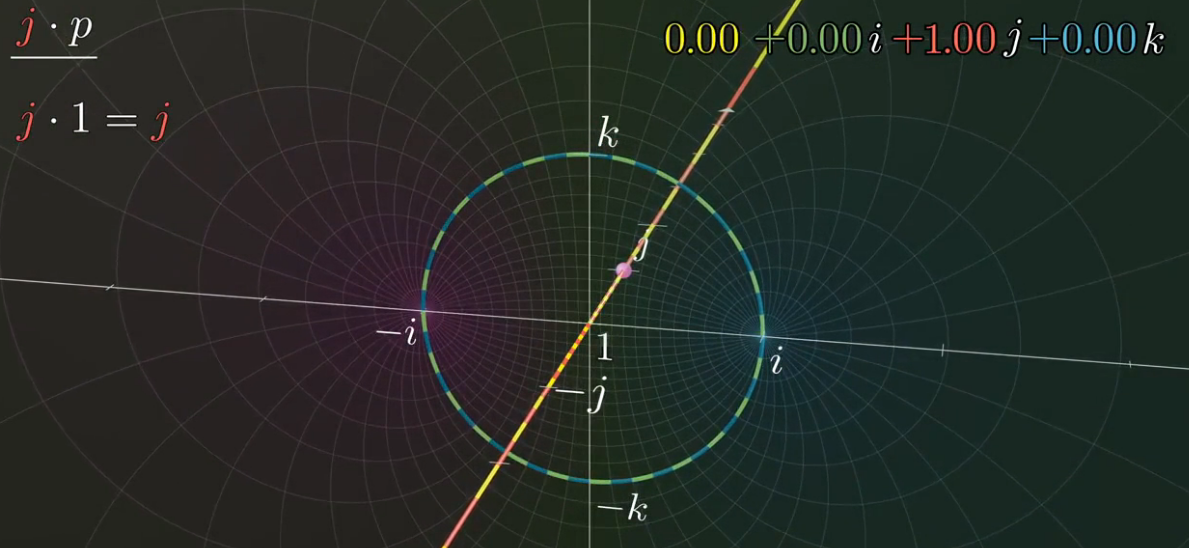
再比如j来左乘,1这个点要移到j,
对应的j轴代表的圆,它会有个垂直的圆在ik上
1到j,然后ik圆右手定则,产生了k到i的90度旋转
投影从三维球被拉成了一个平面
因为j·1=j k·i=j 这两个垂直方向上在同时进行,这样才能确定一个四元数的旋转
- 通过右手定则,可以看着这个虚轴的3d图,把乘法规则记下来。
比如j·i=?
对i进行j的变换,我们先看看j的变换代表什么
从1到j,右手定则i会被移动到-k,即这个变换的结果是-k
所以j·i=-k. - 这也意味着,四元数上乘法没有交换律
类比来说,旋转也没有交换律
对于任意的单位四元数q
首先我们在四维空间画一个过1 q -1的圆,对应过来就是一个过原点的直线
然后在单位球上画一个垂直它的单位圆
旋转这个圆,并且让1带动拉伸到q,这就是这个四元数代表的变换。
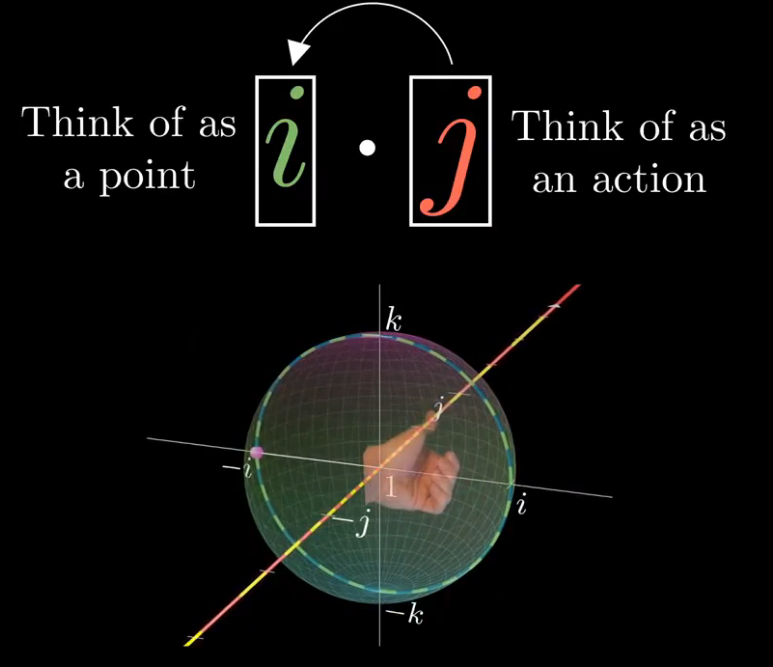
目前展示了把四元数作为左乘作用的理解方式,即把i视为一个函数,扭曲了整个空间,j只是一个点
但是如果用右乘的方式来理解,就要用到左手了,理解左手的法则,对于如何用单位四元数描述三维旋转很有用,这也是下一节的内容。
2 四元数与三维转动
在上一节结束后,可能会怀疑,为什么要发明这种数学体系,和外星人用的一样。
其实它对描述3d方位提供了一个很好的方法,而不会受到其他方法带来的错误以及边界效应。
其他方法描述旋转也有,而且易于想像,比如线性代数的旋转矩阵,并且我们构建旋转矩阵时,往往是想像三根垂直的柱子,他们的旋转角也被叫做欧拉角
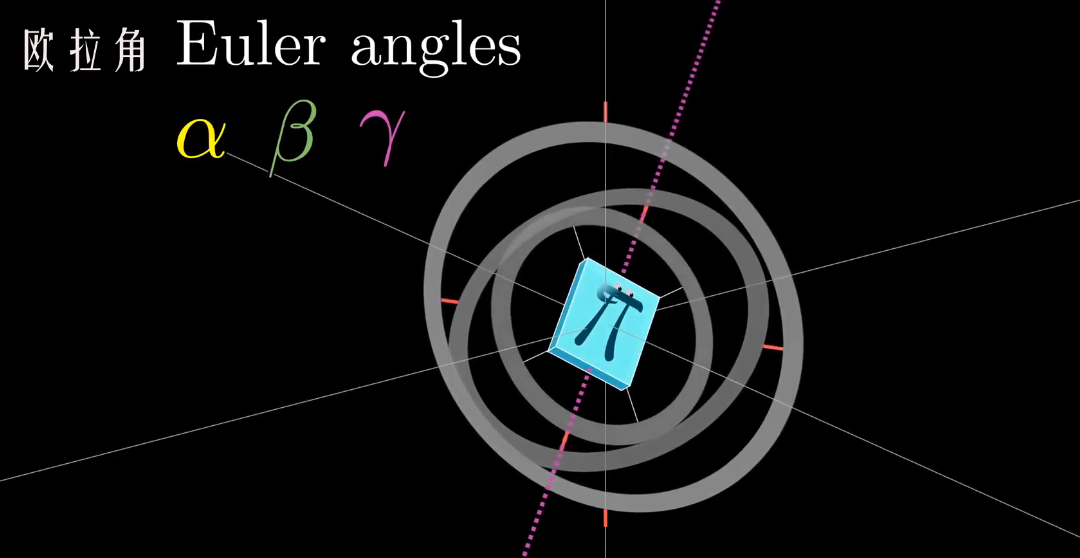
它的问题是万向节锁,也就是两条旋转轴重合时,系统会失去一个自由度,并且在两个不同方向上插值的时候,也会造成困难(关于这些问题网上也有很多资源描述)
四元数不仅避免了万向节锁,而且也提供了三维方位中插值的平滑方法,避免了欧拉角的歧义,也避免了两个旋转矩阵中插值会出现的数值精度和整化问题。
下面开始介绍用用四元数描述旋转
- 首先用一个单位向量定义想要旋转的这个轴,并且i j k 归一化处理,平方和为1
- 用想要旋转的角构建四元数q,用半角的余弦作为实部,半角的正弦乘上虚部
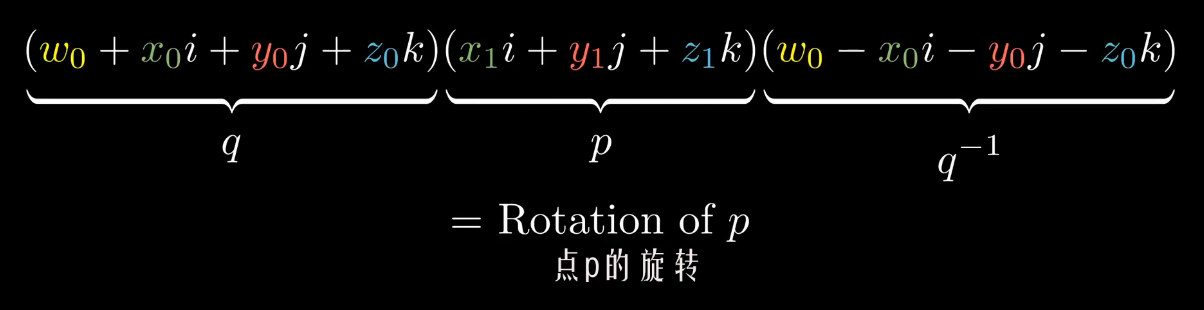
- 取一个三维点p,用i j k表示,如果想知道将这个点绕某个轴旋转某个角度以后会出现在哪里
那么我们会用 q ⋅ p ⋅ q − 1 \ q·p·q^{-1} q⋅p⋅q−1,展开算式就是结果了
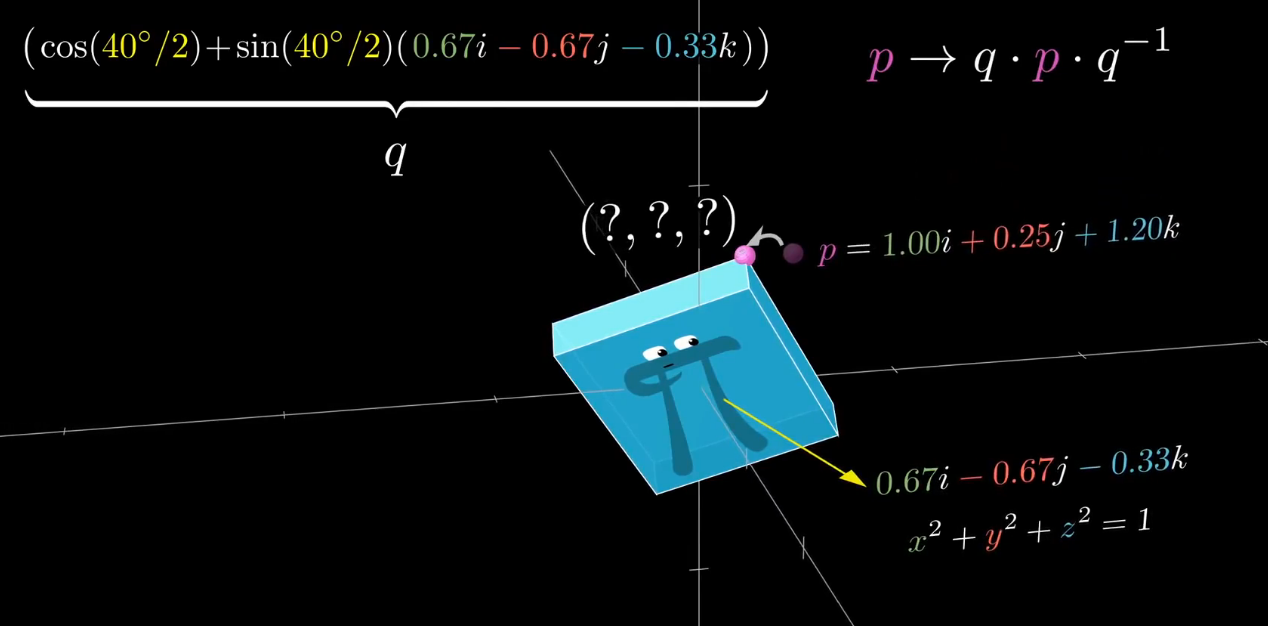
强烈建议去视频它推荐的那个互动视频去实操一遍
2.1 公式如何产生?
我们知道,一个单位四元数代表的变换,可以拆分成这个三维投影球的旋转与垂直方向的拉伸两个部分,我们需要把旋转部分拿出来,而不进行拉伸。
提到旋转就会想到角度与三角函数,而三角函数和复数的关系,我们就想到了欧拉公式。
首先利用欧拉公式对四元数进行推广
- 欧拉公式在复变函数中的证明,是从 e x e^x ex的麦克劳林公式中,把 x x x换成 i x ix ix,然后根据 i i i的运算规则与 c o s cos cos和 s i n sin sin的麦克劳林公式,证明得到 e i x = c o s x + i s i n x e^ix=cosx+isinx e
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









