







 本文详细介绍了OriginCar的硬件安装过程,包括主板和旭日x3派镜像的烧录,以及软件调试,如串口和SSH连接,摄像头启动,以及底盘和键盘驱动的操作。
本文详细介绍了OriginCar的硬件安装过程,包括主板和旭日x3派镜像的烧录,以及软件调试,如串口和SSH连接,摄像头启动,以及底盘和键盘驱动的操作。
OriginCar的首次安装、调试、碰撞
1 . 硬件安装
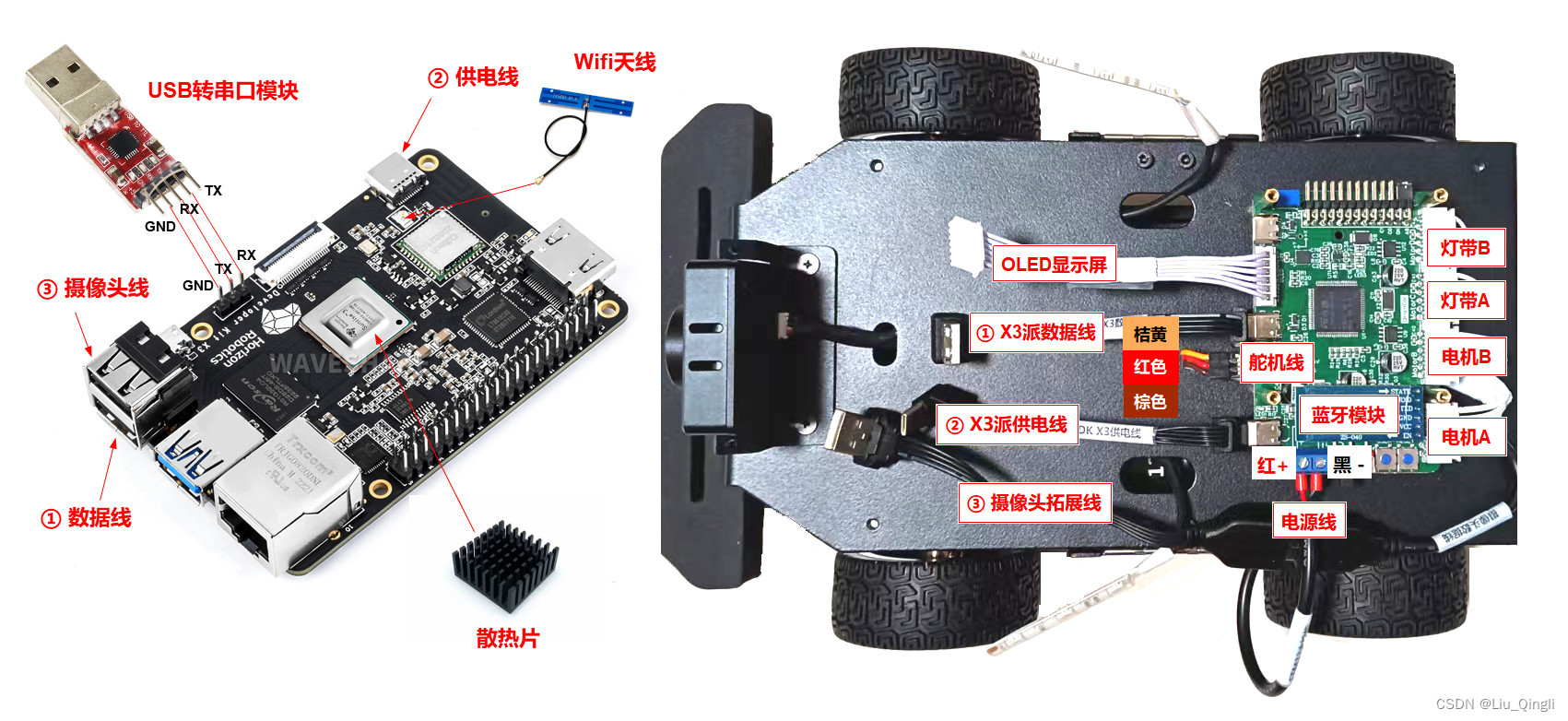
安装如图,不说闲话,直接上图↑↑↑
2 . 软件安装
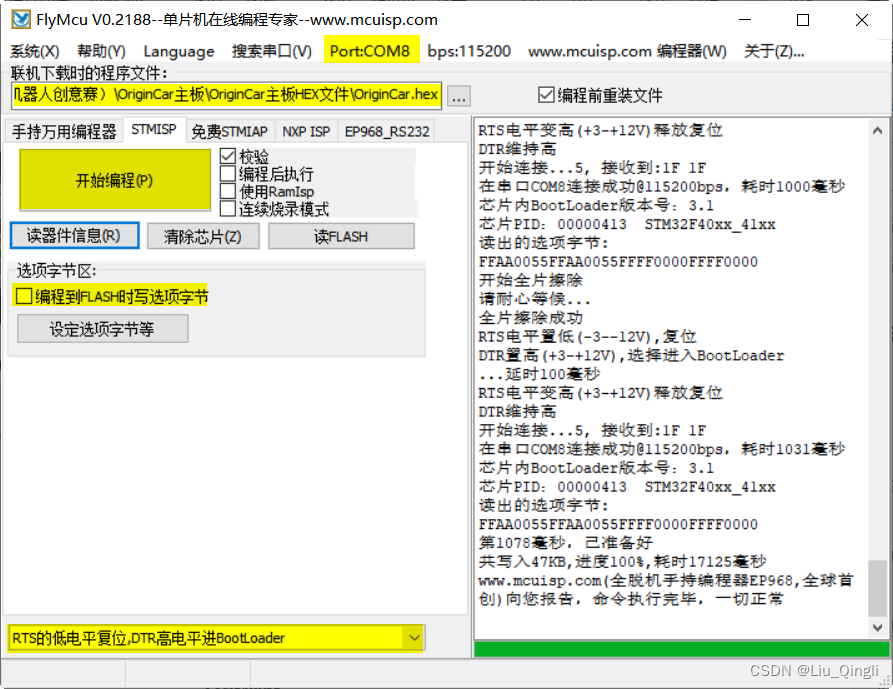
2.1 FlyMcu2188:烧录主板HEX文件OriginCar.hex
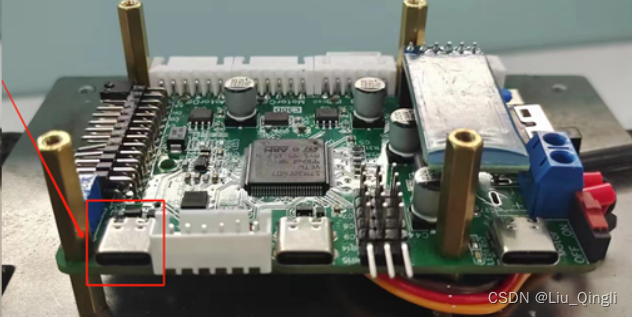
(1)电脑USB连接主板
(2) 打开FlyMcu2188软件,加载OriginCar.hex文件,设置如下图。
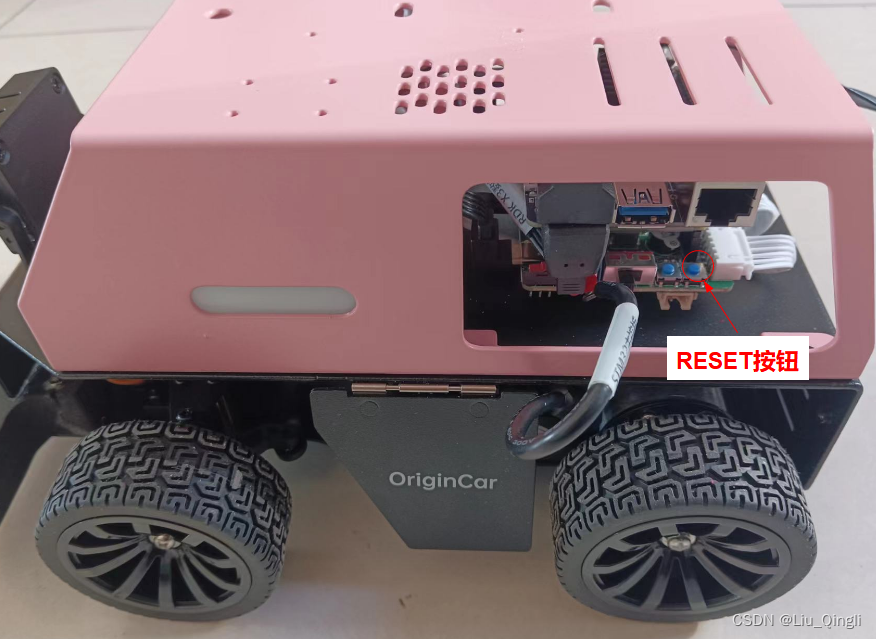
(3)在烧录时,按下主板上的RESET复位按钮。
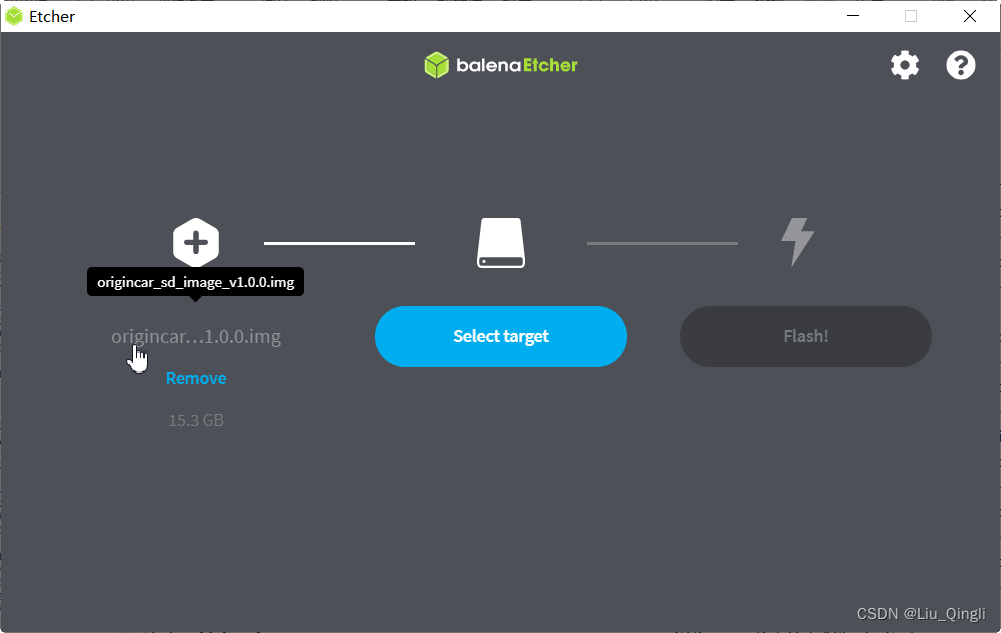
2.2 烧录旭日x3派(RDK X3)镜像
将MicroSD卡插入读卡器,用balenaEtcher工具烧录旭日x3派镜像文件origincar_sd_image_v1.0.0.img。
3 . OriginCar调试
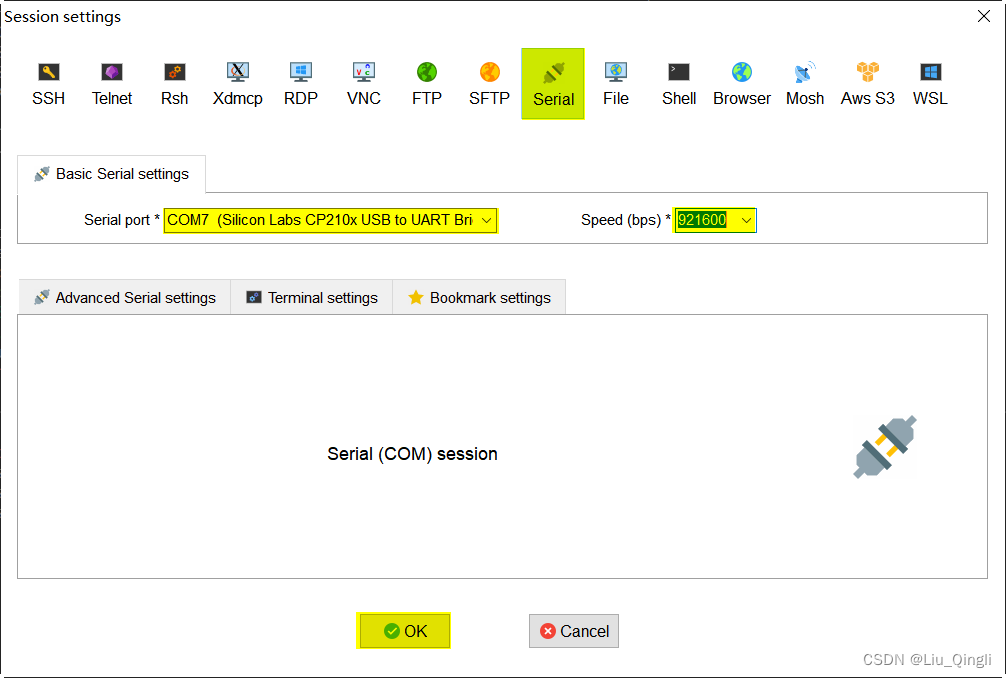
3.1 串口调试
(1)MobaXterm设置:将烧录好的MicroSD卡插入RDK X3,用连接好的USB转串口模块(见安装图)插入电脑USB口,运行MobaXterm,拨动主板电源开关,启动RDK X3。
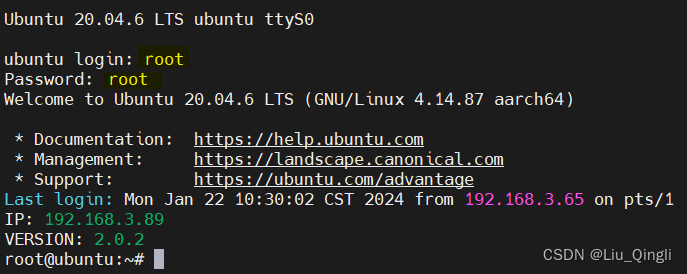
(2)登录名root,密码root
(3)RDK X3连接无线网络,命令行输入以下代码,查看已有wifi网络
sudo nmcli device wifi
(4)命令行输入连接wifi命令
sudo nmcli device wifi connect ‘名称’ password ‘密码’
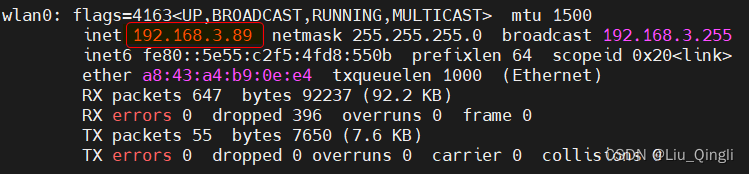
(5)ifconfig查询RDK X3的IP地址
ifconfig
查询无线IP地址,如“192.168.3.89”
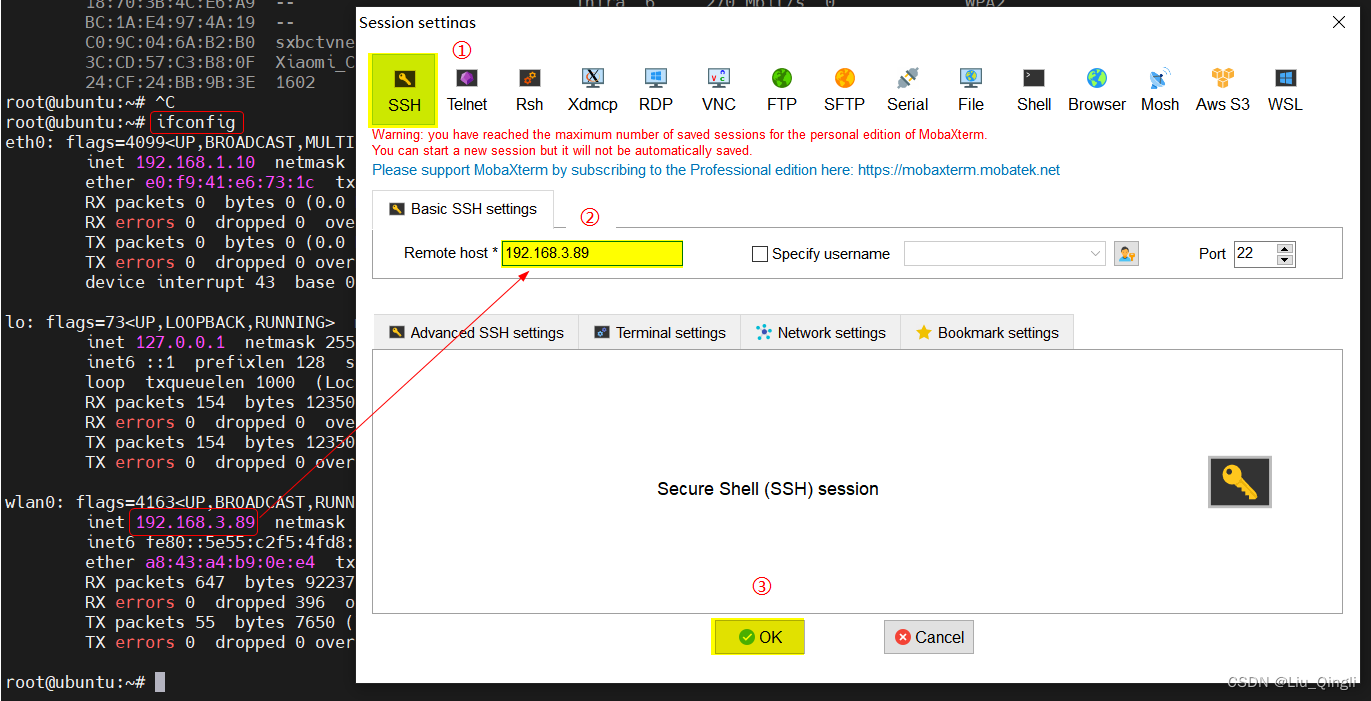
3.2 SSH调试
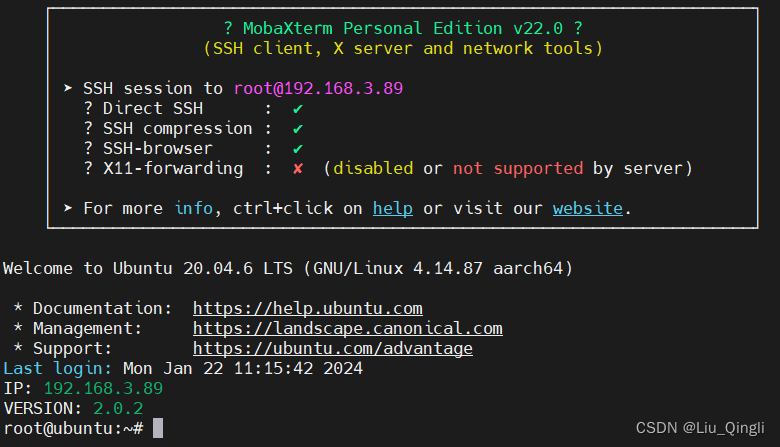
现在RDK X3已经连上wifi了,所以我们可以通过MobaXterm软件,通过SSH方式访问RDK,登录名和密码均为root,我们以后就可以无线连接OriginCar。现在可以拔掉USB串口模块,OriginCar重获自由。
连接成功画面如下:
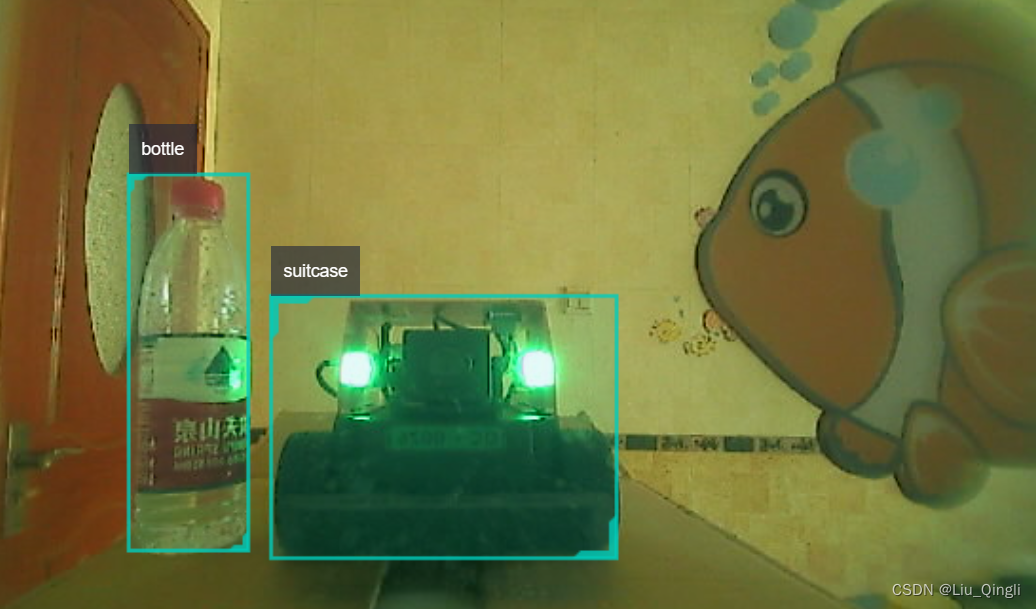
3.3 让OriginCar睁开眼睛
现在,我们可以调用OriginCar的摄像头,你猜Car baby第一眼会看到谁。
(1)终端运行以下指令,启动摄像头:
ros2 launch origincar_bringup usb_websocket_display.launch.py
(2)网页浏览器输入RDK X3的IP地址(本人的IP为192.168.3.89):
注意:电脑和RDK必须在同一局域网段,即:必须连接同一个wifi名


(3)OriginCar睁开眼,看到了什么?其实我们最难看懂的不是别人,而是自己,何况机器人呢?
3.4 让OriginCar动起来
(1)底盘驱动,打开一个新的终端,输入命令行:
ros2 launch origincar_base origincar_bringup.launch.py
(2)键盘驱动,打开一个新的终端,输入命令行:
ros2 run teleop_twist_keyboard teleop_twist_keyboard
可以看到小车控制按键的提示:
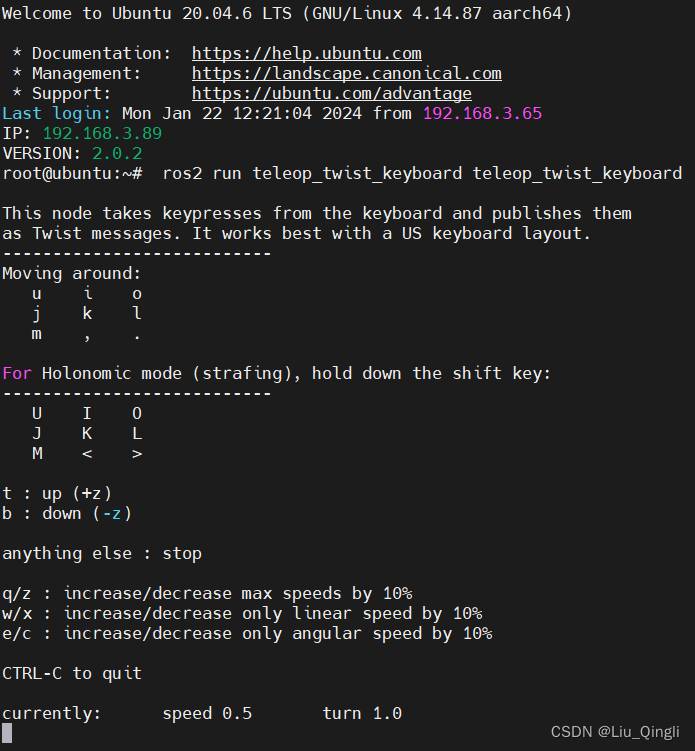
测试发现:低电量时可能无法驱动,“u、i、o”是前进,“j、k、l”是停止,“m , .”是后退,按“i”前进,停止时不要忘记按“k”,当然您也可以和OriginCar碰撞一下,键盘操作可不会自动避障。















 819
819











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









