







文章目录
1. What is TogetherROS?
TogetherROS是地平线基于ROS2 Foxy版本二次开发的机器人操作系统,旨在提升基于地平线芯片平台机器人开发的效率。
2. How to install TogetherROS?
2.1 准备工作
① 旭日x3派开发板(已经安装好天线)
② Ubuntu20.04操作系统烧录完毕,本文采用使用不带图形桌面的Ubuntu Server版本(服务版)
参考链接: 旭日,从地平线升起——旭日X3派开箱测试
③ 调试工具MobaXterm
④ 准备一根网线,笔记本电脑与旭日x3派组成局域网互联
⑤ Wifi联网正常
2.2 局域网连接
2.2.1 网线互联
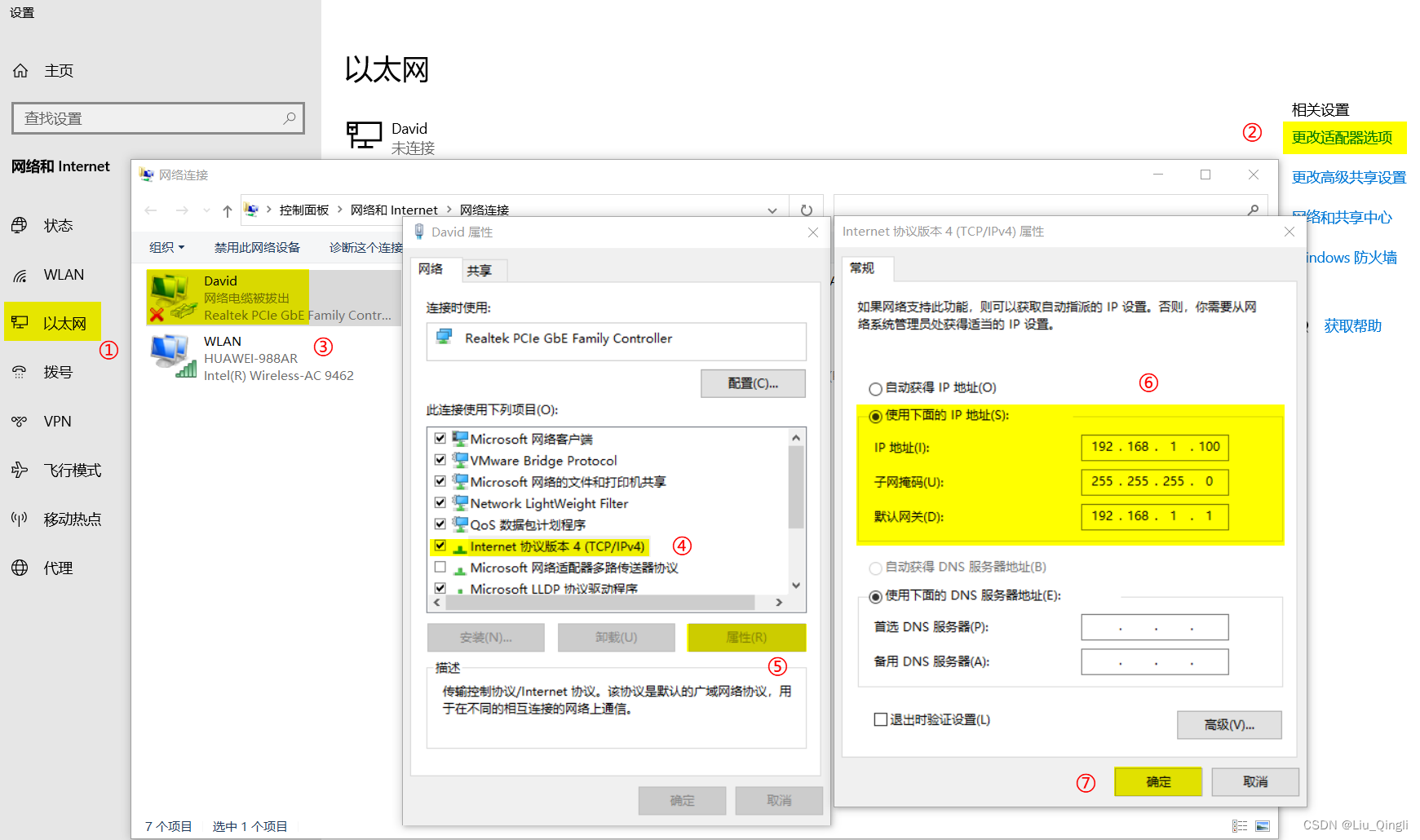
网线一端连接笔记本电脑(Win10操作系统)网口,另一端连接旭日派网口。旭日x3派系统默认静态ip为:192.168.1.10,为了能够与旭日派组成局域网,可以将笔记本电脑的ip地址设置为192.168.1.100,以便与旭日派的ip设置在同一网段。
设置笔记本电脑以太网ip地址:Windows设置“网络和Internet”,选择“以太网”,在网络设置选项中,将IPv4地址设置为:192.168.1.100,网关:192.168.1.1,具体操作步骤如下:
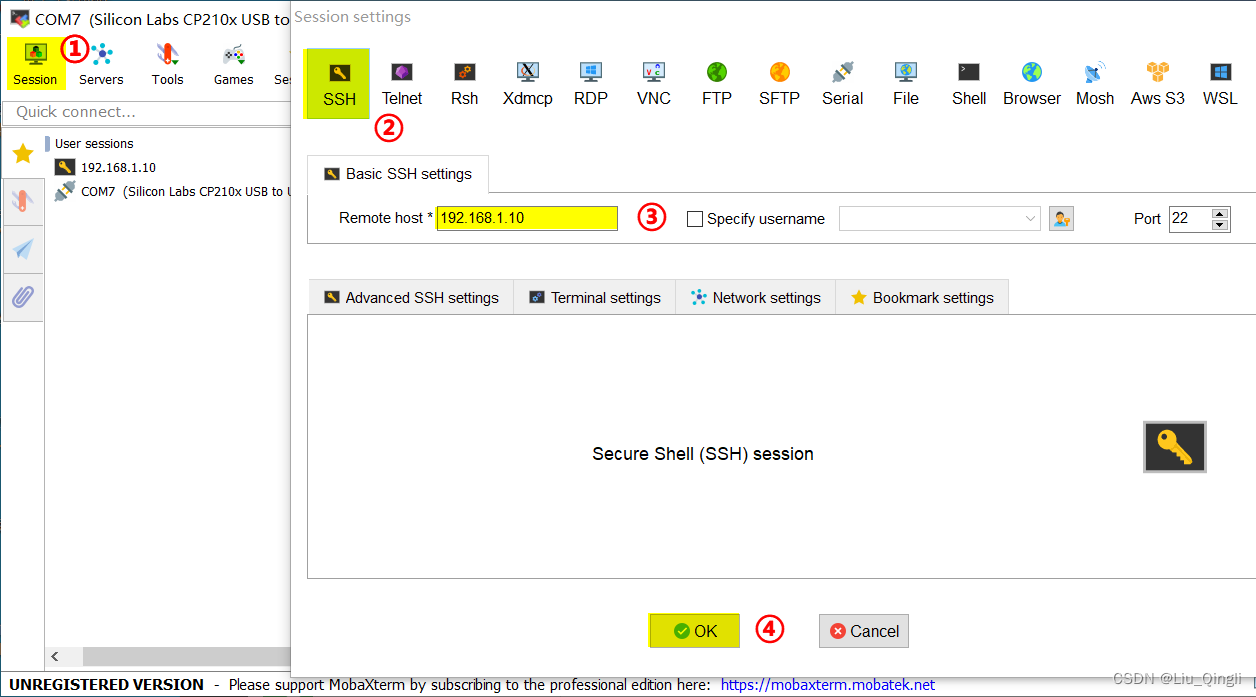
2.2.2 通过SSH局域网连接旭日开发板
① 笔记本电脑运行MobaXterm,单击Session→SSH→Remote host→“192.168.1.10”→OK
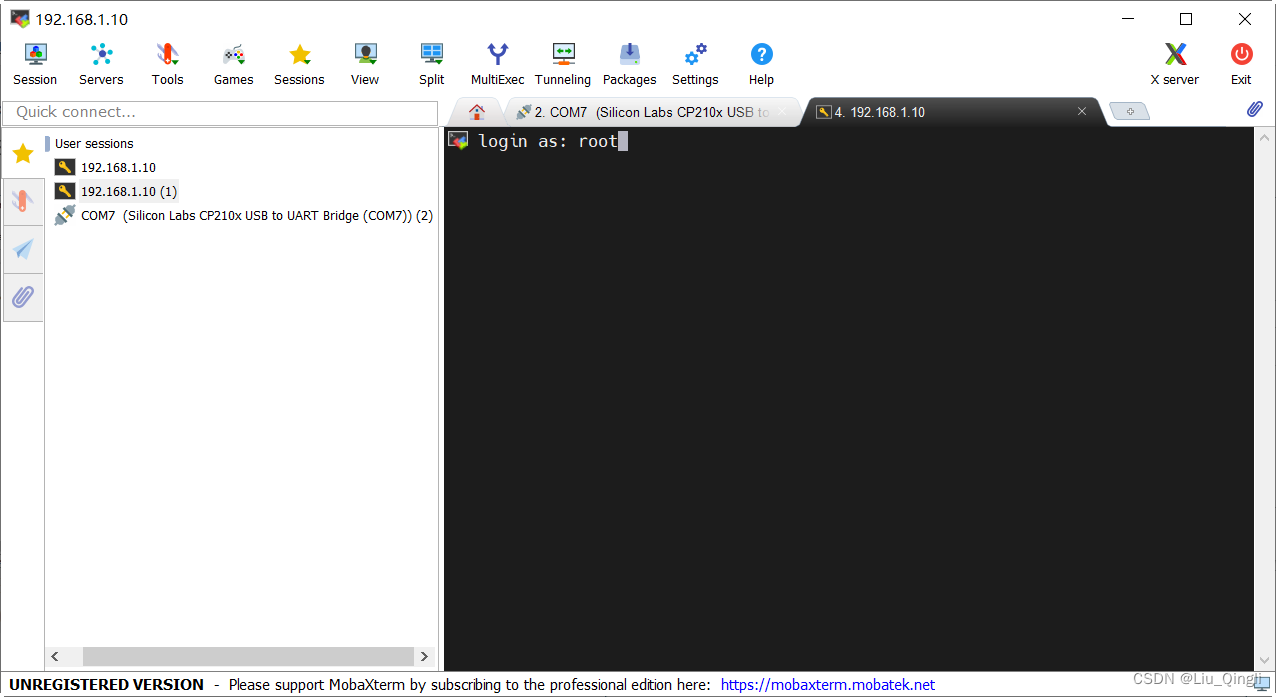
② 通过SSH登录旭日开发板
login as : root
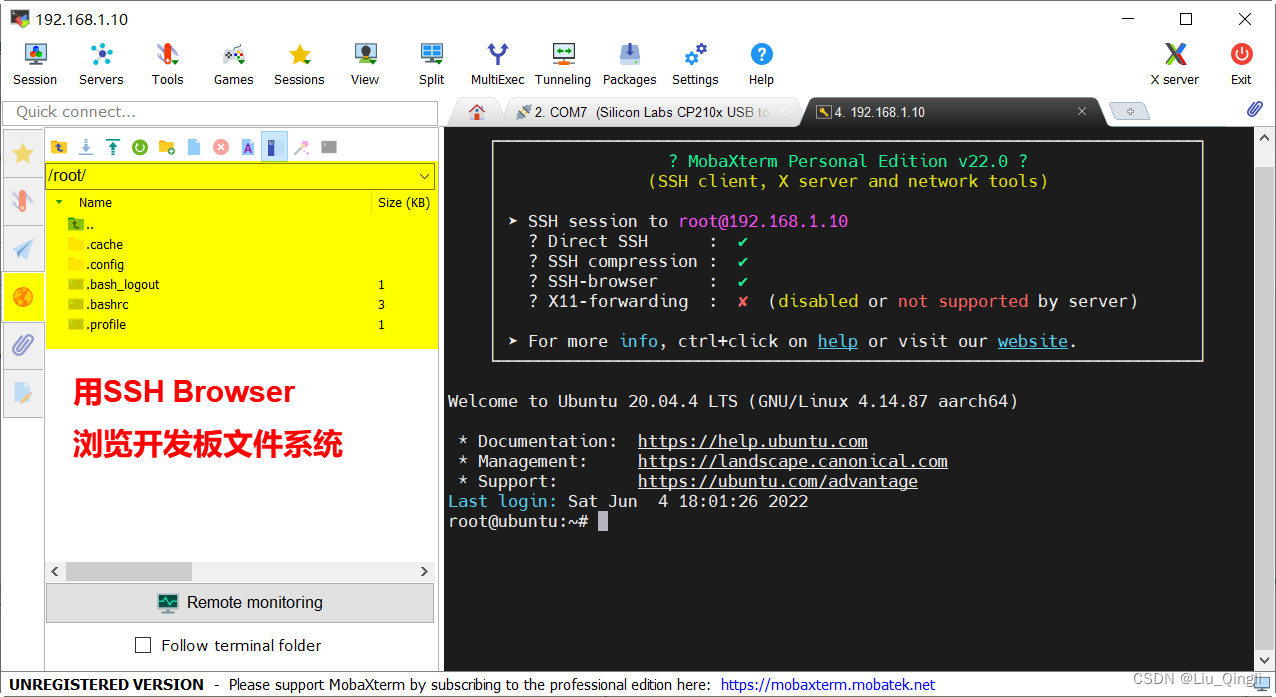
2.2.3 用SSH Browser浏览旭日开发板的文件系统
SSH连接成功后,就可以用MobaXterm的SSH Browser工具浏览并访问旭日开发板的文件系统了。
2.3 下载并安装DEB包
2.3.1 从官网下载HHP.deb文件
将HHP.deb下载到笔记本电脑,下载链接:https://pan.horizon.ai/index.php/s/M5NgJPFoWxB8kmS
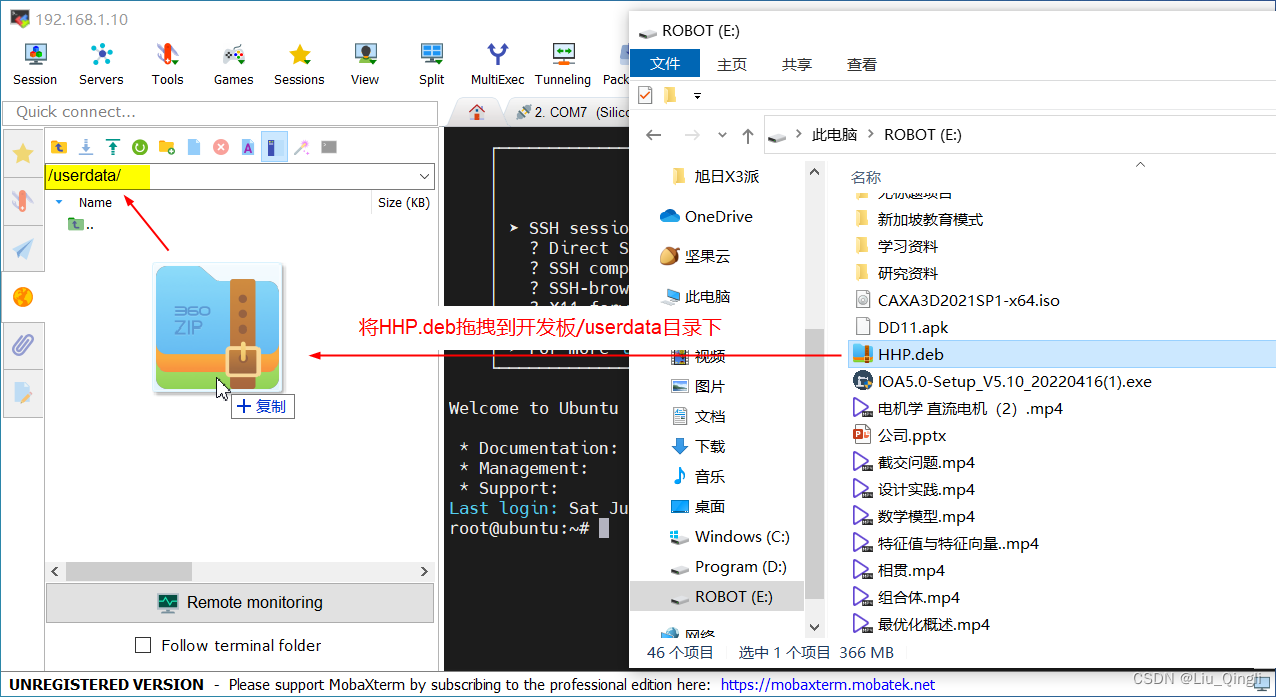
2.3.2 将HHP.deb传送给开发板
① 利用MobaXterm的SSH Browser工具,浏览并打开旭日x3派开发板根目录下的userdata文件夹,按住鼠标左键,直接拖拽HHP.deb到旭日开发板的userdata目录下
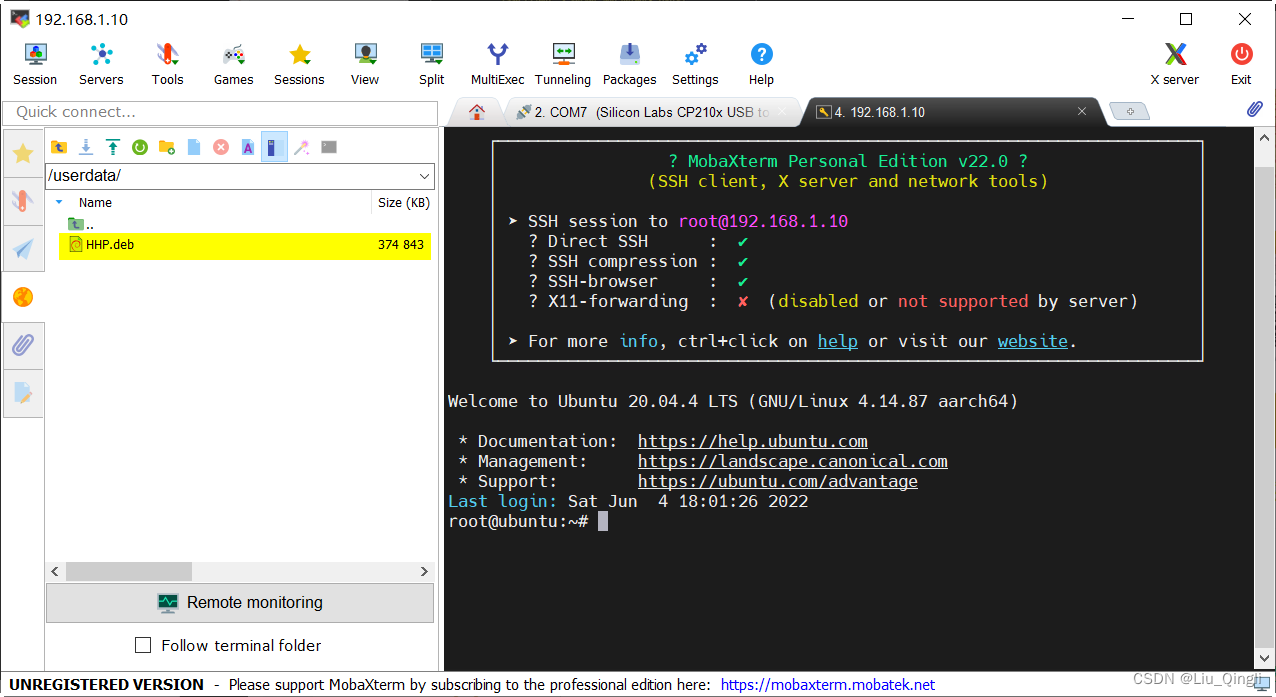
② 查看旭日开发板/userdata目录下的HHP.deb文件
2.3.3 安装HHP.deb
① 进入userdata文件夹
MobaXterm通过SSH模式进入开发板的Ubuntu系统,用户名Boot登录,输入cd /userdata 指令
cd /userdata
② 运行HHP.deb
sudo dpkg -i HHP.deb
③ 完成安装
root@ubuntu:~# cd /userdata
root@ubuntu:/userdata# sudo dpkg -i HHP.deb
Selecting previously unselected package hhp.
(Reading database ... 91162 files and directories currently installed.)
Preparing to unpack HHP.deb ...
Unpacking hhp (1.0.0) ...
Setting up hhp (1.0.0) ...
Generating locales (this might take a while)...
en_US.ISO-8859-1... done
en_US.UTF-8... done
Generation complete.
root@ubuntu:/userdata#
这样,我们用网线将笔记本电脑与旭日x3派开发板互连并组成局域网,将安装文件HHP.deb传送到开发板,再利用SSH登录开发板的Ubuntu系统,完成了TogetherROS的安装,系统文件会自动安装在/opt文件夹下。
2.4 配置旭日x3派的wifi无线网络
接下来,我们需要对开发板的ROS环境进行配置,配置过程中,旭日开发板必须连接外网下载或更新,可以采用有线和无线两种连接方式,下面介绍wifi无线连接方法。
2.4.1 查找wifi
sudo nmcli device wifi rescan
nmcli device wifi list
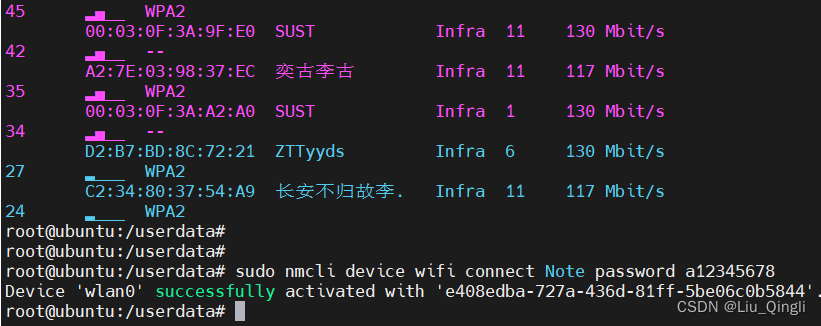
2.4.2 连接wifi
sudo nmcli device wifi connect Note password a12345678
上面指令行中,Note为wifi名称,a12345678为密码,用户要根据自己要连接的wifi名称和密码进行修改,如果wifi连接成功,会有successfully activated提示。
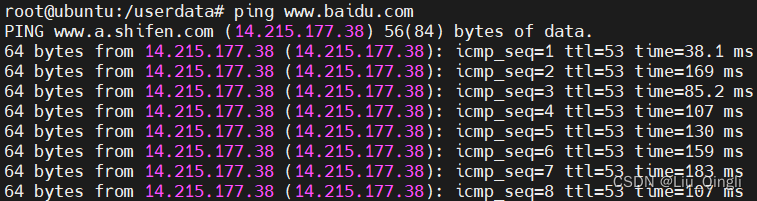
我们可以试着ping一下百度的网站
ping www.baidu.com
可以看到网站的延时数据,说明wifi连接正常,按Ctrl+C退出ping状态。
2.5 更新Ubuntu系统
sudo apt update
sudo apt full-upgrade
2.6 安装ROS2功能包
2.6.1 配置Github服务器ip
安装ROS2需要从Github服务器下载软件,由于Github服务器在国外,为了保证连接有效,可以将Github服务器ip地址提前配置一下hosts:
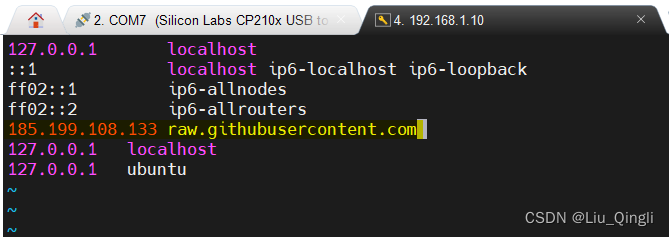
vi /etc/hosts
一般没有使用过vim编辑器的用户,会比较懵,注意vim操作方法:
① 键盘输入“i”,vim界面左下角会切换成“INSERT”模式;
② 键盘↑↓←→键移动光标到指定位置,添加以下Github服务器ip地址行;
185.199.108.133 raw.githubusercontent.com
添加完毕,如下图所示。
③ 键盘按ESC键,此时INSERT提示消失;
④ 键盘输入“:”,再输入wq,退出vim编辑器。
其实本来不想拓展解释vim编辑器,但是为了防止旭友踩坑,借助网友的总结,让大家也能系统了解一下vim的指令集:
:q
//退出
:q!
//退出且不保存(:quit!的缩写)
:wq
//保存并退出
:wq!
//保存并退出即使文件没有写入权限(强制保存退出)
:x
//保存并退出(类似:wq,但是只有在有更改的情况下才保存)
:exit
//保存并退出(和:x相同)
:qa
//退出所有(:quitall的缩写)
:cq
//退出且不保存(即便有错误)
————————————————
版权声明:本文为CSDN博主「许我葳蕤」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_43768851/article/details/121629428
2.6.2 更新软件源和下载工具
sudo apt update && sudo apt install curl gnupg2 lsb-release
2.6.3 设置ROS2软件源密钥
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
注:请双击代码,拷贝完整命令行
2.6.4 设置ROS软件源
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
注:请双击代码,拷贝完整命令行
2.6.5 更新系统
sudo apt update
2.6.6 安装ROS2及常用工具
根据用户的实际需求,可以选择安装完整版或是基础版ROS2:
① 完整版ROS2
sudo apt install ros-foxy-desktop
② 基础版ROS2+Demo例程
sudo apt install ros-foxy-ros-base ros-foxy-demo-nodes-cpp
③ Colcon编译工具
sudo apt install python3-colcon-common-extensions
④ Git工具
sudo apt install git
2.7 创建TogetherROS与ROS2之间的软连接
TogetherROS提供了一个软连接的脚本create_soft_link.py,方便调用ROS2的功能:
① 进入TogetherROS文件夹
cd /opt/tros/
② 运行create_soft_link.py脚本
python3 create_soft_link.py --foxy /opt/ros/foxy/ --tros /opt/tros/
③ 设置环境变量脚本
Source一下local_setup.bash
source /opt/tros/local_setup.bash
3. Hello World!Run TogetherROS!
我们测试一下TogetherROS的通信功能,主要思路是:
① 创建两个终端;
② 在终端1中,发布信息;
③ 在终端2中,订阅信息;
④ 若两者同步,说明 TogetherROS运行正常。
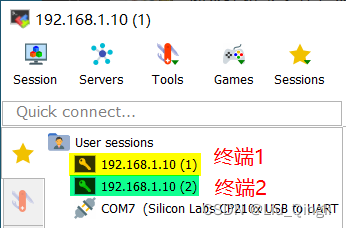
3.1 创建两个SSH终端
打开MobaXterm,新建两个SSH终端,也可以通过复制已有的终端实现,如图所示。
3.2 在终端1中,发布信息
在终端1中,依次运行以下命令行,发布信息:
source /opt/tros/local_setup.bash
ros2 run examples_rclcpp_minimal_publisher publisher_member_function
3.3 在终端2中,订阅信息
在终端2中,依次运行以下命令行,订阅信息:
source /opt/tros/local_setup.bash
ros2 run examples_rclcpp_minimal_subscriber subscriber_member_function
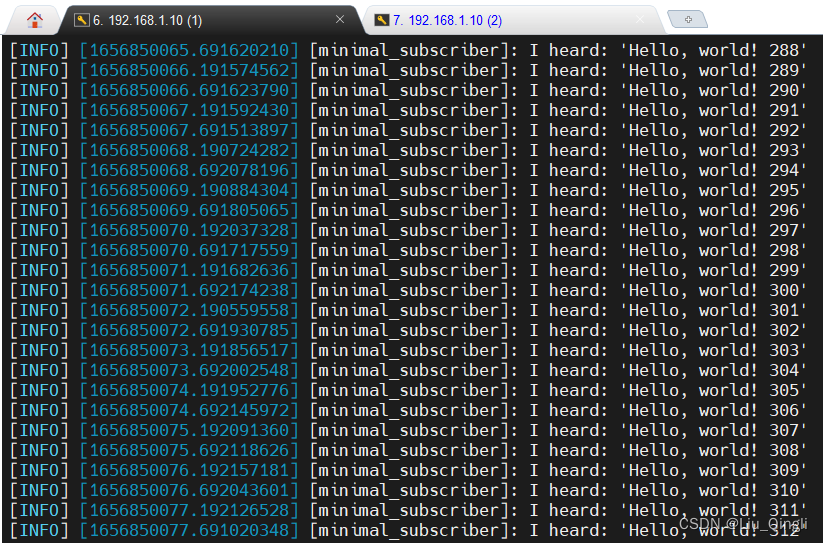
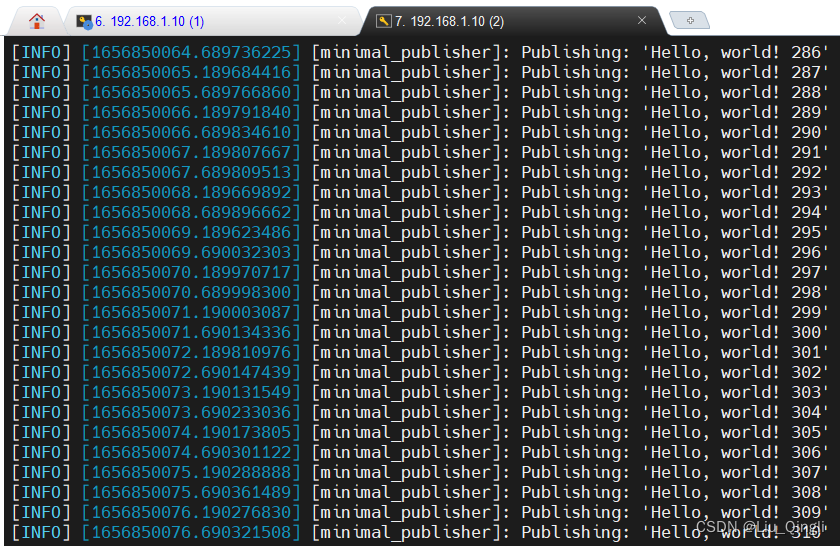
3.4 两个终端同步显示Helloworld
旭日x3派开发板系列文章:
001_旭日X3派初探——开箱测试
参考文献:
【1】地平线机器人平台用户手册:
https://developer.horizon.ai/api/v1/fileData/TogetherROS/index.html
【2】古月居旭日x3派定制课程:
https://class.guyuehome.com/detail/p_62a6def6e4b01a48520bd6c0/8
【3】旭日X3派——ros2 foxy配置记录:
https://developer.horizon.ai/forumDetail/98129598155420818
【4】如何退出Vim编辑器:
https://blog.csdn.net/qq_43768851/article/details/121629428

















 1462
1462

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









