







环境准备
- MatLab2021b
基础准备
打开Matlab,在帮助文档里面搜索step motor,我们这里选择如下模型
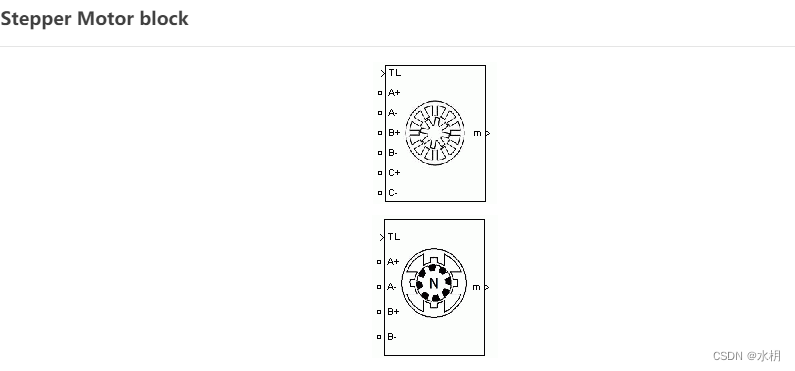
该模型实现了一个通用的步进电机模型:
- 可变磁阻步进电机
- 永磁或混合步进电机
下面我们看下永磁步进电机,其余介绍参考matlab的help文档
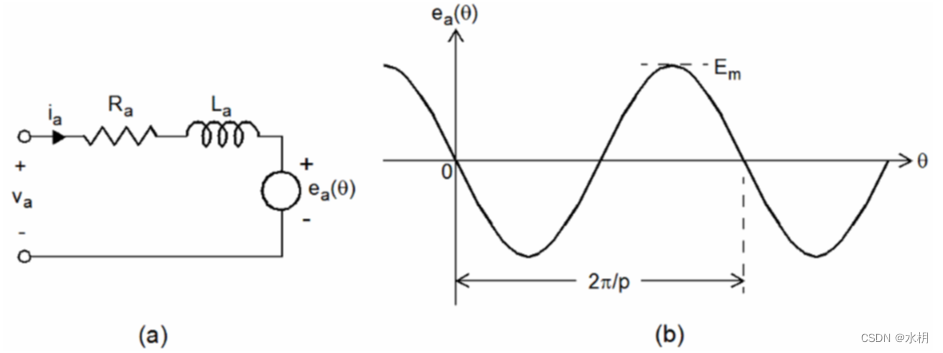
上图显示了永磁 (PM) 或混合步进电机中一相的等效电路:
在该模型中,Ra 和 La 分别代表 A 相绕组的电阻和电感。 由于磁体引入的气隙值较大,PM 或混合式步进电机的绕组电感可以被认为与转子位置无关。 电压源 ea(θ) 表示电机反电动势 (EMF),它是转子位置的正弦函数:
e
a
(
θ
)
=
−
p
ψ
m
s
i
n
(
p
θ
)
d
θ
d
t
e_a(\theta) = -p\psi_msin(p\theta){d\theta\over dt}
ea(θ)=−pψmsin(pθ)dtdθ
p 是极对数。 极对数 p 由 p = Nr/2 给出。
ψm 是电机最大磁通量。
注意,在参考位置 (θ = 0),转子上的北极与 A 轴极完全对齐,以实现 A 相反电动势的零值。
两相 PM 或混合式步进电机产生的电磁转矩等于相电流和磁铁产生的磁通量相互作用产生的转矩与转子凸极产生的制动转矩的总和.
模型参数
这里以永磁/混合为例进行说明:
| 参数 | 说明 |
|---|---|
| 电机类型 | 选择永磁/混合(默认)以实现 PM 或混合步进电机 |
| 相数 | 选择 2(默认)或 4 相 |
| 绕组电感 | 每相绕组的电感 La,以 H 为单位。默认值为 10e-3。 |
| 绕组电阻 | 每相绕组的电阻 Ra,单位为欧姆。默认值为 1.2。 |
| 步距角 | 转子运动的步距角,以度为单位。默认值为 30。 |
| 最大磁链 | 由磁铁产生的最大磁链 ψm,以 V.s 为单位。默认值为 0.04。 |
| 最大定位扭矩 | 最大制动扭矩,Tdm,以 N.m 为单位,由转子的凸极产生。默认值为 0.02。 |
| 总惯量 | 电机和负载的总惯性动量 J,以 kg.m2 为单位。默认值为 1e-4/5。 |
| 总粘性摩擦系数 | 电机和负载的总粘性摩擦系数 B,单位为 N.m.s。默认值为 1e-3。 |
| 初速度 | 初始旋转速度,ω0,以 rad/s 为单位。默认值为 0。 |
| 初始位置 | 初始转子位置,Θ0,以度为单位。默认值为 0。 |
| 采样时间(-1 表示继承) | 指定步进电机采样时间,以 s 为单位。指定 –1 以继承模型中 powergui 模块的采样时间。默认值为 –1。 |
输入和输出
TL:机械负载扭矩,单位 N.m TL 在电动机运行时为正,在发电机运行时为负。
| Signal | Definition | Units | Symbol |
|---|---|---|---|
| 1 | Phase | voltage | V |
| 2 | Phase | current A | Iph |
| 3 | Electromagnetic | torque | N.m |
| 4 | Rotor speed | rad/s | w |
| 5 | Rotor position | rad | Theta |
模块的 Simulink® 输出是一个包含五个信号的向量。 您可以使用 Simulink 库中提供的 Bus Selector 模块对这些信号进行解复用。
仿真原理图

负载为0时进行仿真:


增加负载扭矩到8T.m,再次观察波形:
















 859
859











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









