






目的:最近写C++代码,遇到求矩阵的逆。Eigen库有方法计算。但是因为再求导过程中,需要求逆的具体方式。因此自己实现了求矩阵的逆。具体代码如下,对于公式部分后续再补,更新。
//更新公式部分
维基百科的定义:
在线性代数中,一个方形矩阵的伴随矩阵(英语:adjugate matrix)是一个类似于逆矩阵的概念。如果矩阵可逆,那么它的逆矩阵和它的伴随矩阵之间只差一个系数。然而,伴随矩阵对不可逆的矩阵也有定义,并且不需要用到除法。
假设
A
\bm{A}
A的伴随矩阵记作
a
d
j
(
A
)
adj(\bm{A})
adj(A)或者
A
∗
\bm{A}^*
A∗
因为在项目中通常需要
3
×
3
3\times 3
3×3的矩阵,它可以定义为:
A
=
[
a
11
a
12
a
13
a
21
a
22
a
23
a
31
a
32
a
33
]
\bm{A}=\begin{bmatrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{bmatrix}
A=⎣
⎡a11a21a31a12a22a32a13a23a33⎦
⎤
它的伴随矩阵是:
a d j ( A ) = [ + ∣ a 22 a 23 a 32 a 33 ∣ − ∣ a 12 a 13 a 32 a 33 ∣ + ∣ a 12 a 13 a 22 a 23 ∣ − ∣ a 21 a 23 a 31 a 33 ∣ + ∣ a 11 a 13 a 31 a 33 ∣ − ∣ a 11 a 13 a 21 a 23 ∣ + ∣ a 21 a 22 a 31 a 32 ∣ − ∣ a 11 a 12 a 31 a 32 ∣ + ∣ a 11 a 12 a 21 a 22 ∣ ] adj(\bm{A})=\begin{bmatrix} +\begin{vmatrix} a_{22} & a_{23} \\ a_{32} & a_{33} \end{vmatrix} & -\begin{vmatrix} a_{12} & a_{13} \\ a_{32} & a_{33} \end{vmatrix} & +\begin{vmatrix} a_{12} & a_{13} \\ a_{22} & a_{23} \end{vmatrix} \\ \\ -\begin{vmatrix} a_{21} & a_{23} \\ a_{31} & a_{33} \end{vmatrix} & +\begin{vmatrix} a_{11} & a_{13} \\ a_{31} & a_{33} \end{vmatrix} & -\begin{vmatrix} a_{11} & a_{13} \\ a_{21} & a_{23} \end{vmatrix} \\ \\ +\begin{vmatrix} a_{21} & a_{22} \\ a_{31} & a_{32} \end{vmatrix} & -\begin{vmatrix} a_{11} & a_{12} \\ a_{31} & a_{32} \end{vmatrix} & +\begin{vmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{vmatrix} \end{bmatrix} adj(A)=⎣ ⎡+∣ ∣a22a32a23a33∣ ∣−∣ ∣a21a31a23a33∣ ∣+∣ ∣a21a31a22a32∣ ∣−∣ ∣a12a32a13a33∣ ∣+∣ ∣a11a31a13a33∣ ∣−∣ ∣a11a31a12a32∣ ∣+∣ ∣a12a22a13a23∣ ∣−∣ ∣a11a21a13a23∣ ∣+∣ ∣a11a21a12a22∣ ∣⎦ ⎤
其中
∣
a
i
m
a
i
n
a
j
m
a
j
n
∣
=
d
e
t
[
a
i
m
a
i
n
a
j
m
a
j
n
]
=
d
e
t
∣
a
i
m
a
i
n
a
j
m
a
j
n
∣
\begin{vmatrix} a_{im} & a_{in} \\ a_{jm} & a_{jn} \end{vmatrix} =det \begin{bmatrix} a_{im} & a_{in} \\ a_{jm} & a_{jn} \end{bmatrix}=det \begin{vmatrix} a_{im} & a_{in} \\ a_{jm} & a_{jn} \end{vmatrix}
∣
∣aimajmainajn∣
∣=det[aimajmainajn]=det∣
∣aimajmainajn∣
∣
从上面公式可以看出,伴随矩阵是余因子矩阵的转置。
伴随矩阵可以用来计算矩阵的逆:
A
−
1
=
a
d
j
(
A
)
d
e
t
(
A
)
=
A
∗
∣
A
∣
\bm{A}^{-1}=\cfrac{adj(\bm{A})}{det(\bm{A})}=\cfrac{\bm{A}^*}{|\bm{A}|}
A−1=det(A)adj(A)=∣A∣A∗
其中
A
∗
\bm{A}^*
A∗为伴随矩阵;
∣
A
∣
|\bm{A}|
∣A∣为矩阵的行列式。
其中行列式计算可以参考我的blog
https://blog.csdn.net/weixin_43851636/article/details/125999210?spm=1001.2014.3001.5502
下面是通过伴随矩阵计算矩阵的逆的C++代码,它和Eigen库中的求逆一样。
c++代码
#include<Eigen/Eigen>
#include<iostream>
#include<vector>
#include<string>
/*
m=[n1,
n2,
n3]
*/
Eigen::Matrix3f ConstructMatrix3fFromVectors(Eigen::Vector3f& n1, Eigen::Vector3f& n2, Eigen::Vector3f& n3)
{
Eigen::Matrix3f m;
m.block<1, 3>(0, 0) = n1;
m.block<1, 3>(1, 0) = n2;
m.block<1, 3>(2, 0) = n3;
return m;
}
Eigen::Matrix3f ConstructAdjugateMatrix3f(Eigen::Matrix3f& m)
{
Eigen::Matrix3f adju_m;
adju_m(0, 0) = m(1, 1)*m(2, 2) - m(2, 1)*m(1, 2);
adju_m(0, 1) = -(m(0, 1)*m(2, 2) - m(2, 1)*m(0, 2));
adju_m(0, 2) = m(0, 1)*m(1, 2) - m(1, 1)*m(0, 2);
adju_m(1, 0) = -(m(1, 0)*m(2, 2) - m(2, 0)*m(1, 2));
adju_m(1, 1) = m(0, 0)*m(2, 2) - m(2, 0)*m(0, 2);
adju_m(1, 2) = -(m(0, 0)*m(1, 2) - m(1, 0)*m(0, 2));
adju_m(2, 0) = m(1, 0)*m(2, 1) - m(2, 0)*m(1, 1);
adju_m(2, 1) = -(m(0, 0)*m(2, 1) - m(2, 0)*m(0, 1));
adju_m(2, 2) = m(0, 0)*m(1, 1) - m(1, 0)*m(0, 1);
return adju_m;
}
Eigen::Vector3f ComputeKVector(Eigen::Matrix3f& adjm, Eigen::Vector3f& b)
{
Eigen::Vector3f k;
k = adjm*b;
return k;
}
//test adjugate matrix
int main(int argc, char** argv)
{
Eigen::Vector3f n1 = Eigen::Vector3f(1, 2, 3);
Eigen::Vector3f n2 = Eigen::Vector3f(2, 1, 3);
Eigen::Vector3f n3 = Eigen::Vector3f(2, 2, 1);
Eigen::Matrix3f m = ConstructMatrix3fFromVectors(n1, n2, n3);
Eigen::Matrix3f m_i = m.inverse();
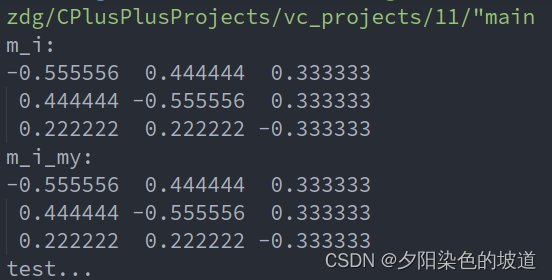
std::cerr << "m_i: \n" << m_i << std::endl;
Eigen::Matrix3f adju_m = ConstructAdjugateMatrix3f(m);
float det = m.determinant();
Eigen::Matrix3f m_i_my = adju_m/det;
std::cerr << "m_i_my: \n" << m_i_my << std::endl;
std::cerr<<"end test..."<<std::endl;
return 0;
}
运行的结果如下:它和eigen计算一样的。
贴上维基百科的超链接为:
https://zh.m.wikipedia.org/zh-sg/%E4%BC%B4%E9%9A%8F%E7%9F%A9%E9%98%B5

















 1192
1192

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









