







系列文章目录
北科天绘 16线3维激光雷达开发教程
基于Rplidar二维雷达使用Hector_SLAM算法在ROS中建图
Nvidia Jetson Nano学习笔记–串口通信
Nvidia Jetson Nano学习笔记–使用C语言实现GPIO 输入输出
Autolabor ROS机器人教程
从零搭建一台基于ROS的自动驾驶车-----1.整体介绍
前言
在整个智能车中运动控制是最基础也是最为重要的一步,本文主要的内容有:
1.ROS通过串口与STM32实现通信,继而控制智能车运动
2.在ROS中通过键盘运动控制节点来实现小车的运动
主要参考:基于ROS平台的STM32小车–汇总
一、串口通信
ros中有现成的串口功能包来通信。
1.首先创建一个ROS功能空间
mkdir -p ros_car(自定义空间名称)/src
cd roscar
catkin_make
上述命令,首先会创建一个工作空间以及一个 src 子目录,然后再进入工作空间调用 catkin_make命令编译。
2.下载ROS串口通信的功能包
cd ~/ros_car/src
git clone https://github.com/ncnynl/teleop_twist_keyboard.git
3.编译
cd ~/catkin_ws
catkin_make
4.编写主要程序
$ cd ~/ros_car/src
$ catkin_create_pkg base_controller roscpp
$ cd ros_car/src/base_controller
$ mkdir src
$ touch src/base_controller.cpp
$ gedit src/base_controller.cpp
/*
基于串口通信的ROS小车基础控制器,功能如下:
1.实现ros控制数据通过固定的格式和串口通信,从而达到控制小车的移动
2.订阅了/cmd_vel主题,只要向该主题发布消息,就能实现对控制小车的移动
3.发布里程计主题/odm 串口通信说明:
1.写入串口 (1)内容:左右轮速度,单位为mm/s (2)格式:10字节,[右轮速度4字节][左轮速度4字节][结束符"\r\n"2字节]
2.读取串口 (1)内容:小车x,y坐标,方向角,线速度,角速度,单位依次为:mm,mm,rad,mm/s,rad/s (2)格式:21字节,[X坐标4字节][Y坐标4字节][方向角4字节][线速度4字节][角速度4字节][结束符"\n"1字节]
*/
#include "ros/ros.h" //ros需要的头文件
#include <geometry_msgs/Twist.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
//以下为串口通讯需要的头文件
#include <string>
#include <iostream>
#include <cstdio>
#include <unistd.h>
#include <math.h>
#include "serial/serial.h"
/****************************************************************************/
using std::string;
using std::exception;
using std::cout;
using std::cerr;
using std::endl;
using std::vector;
/*****************************************************************************/
float ratio = 1000.0f ; //转速转换比例,执行速度调整比例
float D = 0.2680859f ; //两轮间距,单位是m
float linear_temp=0,angular_temp=0;//暂存的线速度和角速度
/****************************************************/
unsigned char data_terminal0=0x0d; //“/r"字符
unsigned char data_terminal1=0x0a; //“/n"字符
unsigned char speed_data[10]={0}; //要发给串口的数据
string rec_buffer; //串口数据接收变量
//发送给下位机的左右轮速度,里程计的坐标和方向
union floatData //union的作用为实现char数组和float之间的转换
{
float d;
unsigned char data[4];
}right_speed_data,left_speed_data,position_x,position_y,oriention,vel_linear,vel_angular;
/************************************************************/
void callback(const geometry_msgs::Twist & cmd_input)//订阅/cmd_vel主题回调函数
{
string port("/dev/ttyUSB0"); //小车串口号
unsigned long baud = 115200; //小车串口波特率
serial::Serial my_serial(port, baud, serial::Timeout::simpleTimeout(1000)); //配置串口
angular_temp = cmd_input.angular.z ;//获取/cmd_vel的角速度,rad/s
linear_temp = cmd_input.linear.x ;//获取/cmd_vel的线速度.m/s
//将转换好的小车速度分量为左右轮速度
left_speed_data.d = linear_temp - 0.5f*angular_temp*D ;
right_speed_data.d = linear_temp + 0.5f*angular_temp*D ;
//存入数据到要发布的左右轮速度消息
left_speed_data.d*=ratio; //放大1000倍,mm/s
right_speed_data.d*=ratio;//放大1000倍,mm/s
for(int i=0;i<4;i++) //将左右轮速度存入数组中发送给串口
{
speed_data[i]=right_speed_data.data[i];
speed_data[i+4]=left_speed_data.data[i];
}
//在写入串口的左右轮速度数据后加入”/r/n“
speed_data[8]=data_terminal0;
speed_data[9]=data_terminal1;
//写入数据到串口
my_serial.write(speed_data,10);
}
int main(int argc, char **argv)
{
string port("/dev/ttyUSB0");//小车串口号
unsigned long baud = 115200;//小车串口波特率
serial::Serial my_serial(port, baud, serial::Timeout::simpleTimeout(1000));//配置串口
ros::init(argc, argv, "base_controller");//初始化串口节点
ros::NodeHandle n; //定义节点进程句柄
ros::Subscriber sub = n.subscribe("cmd_vel", 20, callback); //订阅/cmd_vel主题
/*
ros::Publisher odom_pub= n.advertise<nav_msgs::Odometry>("odom", 20); //定义要发布/odom主题
static tf::TransformBroadcaster odom_broadcaster;//定义tf对象
geometry_msgs::TransformStamped odom_trans;//创建一个tf发布需要使用的TransformStamped类型消息
nav_msgs::Odometry odom;//定义里程计对象
geometry_msgs::Quaternion odom_quat; //四元数变量
//定义covariance矩阵,作用为解决文职和速度的不同测量的不确定性
float covariance[36] = {0.01, 0, 0, 0, 0, 0, // covariance on gps_x
0, 0.01, 0, 0, 0, 0, // covariance on gps_y
0, 0, 99999, 0, 0, 0, // covariance on gps_z
0, 0, 0, 99999, 0, 0, // large covariance on rot x
0, 0, 0, 0, 99999, 0, // large covariance on rot y
0, 0, 0, 0, 0, 0.01}; // large covariance on rot z
//载入covariance矩阵
for(int i = 0; i < 36; i++)
{
odom.pose.covariance[i] = covariance[i];;
}
*/
ros::Rate loop_rate(10);//设置周期休眠时间
while(ros::ok())
{
/*
rec_buffer =my_serial.readline(25,"\n"); //获取串口发送来的数据
const char *receive_data=rec_buffer.data(); //保存串口发送来的数据
if(rec_buffer.length()==21) //串口接收的数据长度正确就处理并发布里程计数据消息
{
for(int i=0;i<4;i++)//提取X,Y坐标,方向,线速度,角速度
{
position_x.data[i]=receive_data[i];
position_y.data[i]=receive_data[i+4];
oriention.data[i]=receive_data[i+8];
vel_linear.data[i]=receive_data[i+12];
vel_angular.data[i]=receive_data[i+16];
}
//将X,Y坐标,线速度缩小1000倍
position_x.d/=1000; //m
position_y.d/=1000; //m
vel_linear.d/=1000; //m/s
//里程计的偏航角需要转换成四元数才能发布
odom_quat = tf::createQuaternionMsgFromYaw(oriention.d);//将偏航角转换成四元数
//载入坐标(tf)变换时间戳
odom_trans.header.stamp = ros::Time::now();
//发布坐标变换的父子坐标系
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_footprint";
//tf位置数据:x,y,z,方向
odom_trans.transform.translation.x = position_x.d;
odom_trans.transform.translation.y = position_y.d;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
//发布tf坐标变化
odom_broadcaster.sendTransform(odom_trans);
//载入里程计时间戳
odom.header.stamp = ros::Time::now();
//里程计的父子坐标系
odom.header.frame_id = "odom";
odom.child_frame_id = "base_footprint";
//里程计位置数据:x,y,z,方向
odom.pose.pose.position.x = position_x.d;
odom.pose.pose.position.y = position_y.d;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
//载入线速度和角速度
odom.twist.twist.linear.x = vel_linear.d;
//odom.twist.twist.linear.y = odom_vy;
odom.twist.twist.angular.z = vel_angular.d;
//发布里程计
odom_pub.publish(odom);
*/
ros::spinOnce();//周期执行
loop_rate.sleep();//周期休眠
}
//程序周期性调用
//ros::spinOnce(); //callback函数必须处理所有问题时,才可以用到
}
return 0;
}
在上面的代码中主要是订阅了cmd_vel这个话题,将cmd_vel这个话题的数据就是控制小车运动的数据,将其解算一下,通过my_serial.write(speed_data,10); 将数据发送给串口来控制小车运动,注释掉的代码其作用是采集串口反馈回来的小车的速度,通过odom这个话题发送出去,但是在目前是用不到这段代码的。
主要用到了X轴的线速度和Z轴的角速度。
5.修改 CMakeLists.txt
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
serial
tf
nav_msgs
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES base_controller
CATKIN_DEPENDS roscpp rospy std_msgs
# DEPENDS system_lib
)
include_directories(
${catkin_INCLUDE_DIRS}
${serial_INCLUDE_DIRS}
)
add_executable(base_controller src/base_controller.cpp)
target_link_libraries(base_controller ${catkin_LIBRARIES})
编译完,运行这个ros节点,该节点会订阅cmd_vel这个话题, 继而控制小车运动。
需要注意的是设备的串口号和波特率需要根据实际情况进行修改。
二、键盘控制
键盘控制节点只需要发送cmd_vel这个话题给base_controller这个节点就可以实现键盘控制小车运动。
1.下载键盘控制的ROS包
cd ~/ros_car/src
git clone https://github.com/ncnynl/teleop_twist_keyboard.git
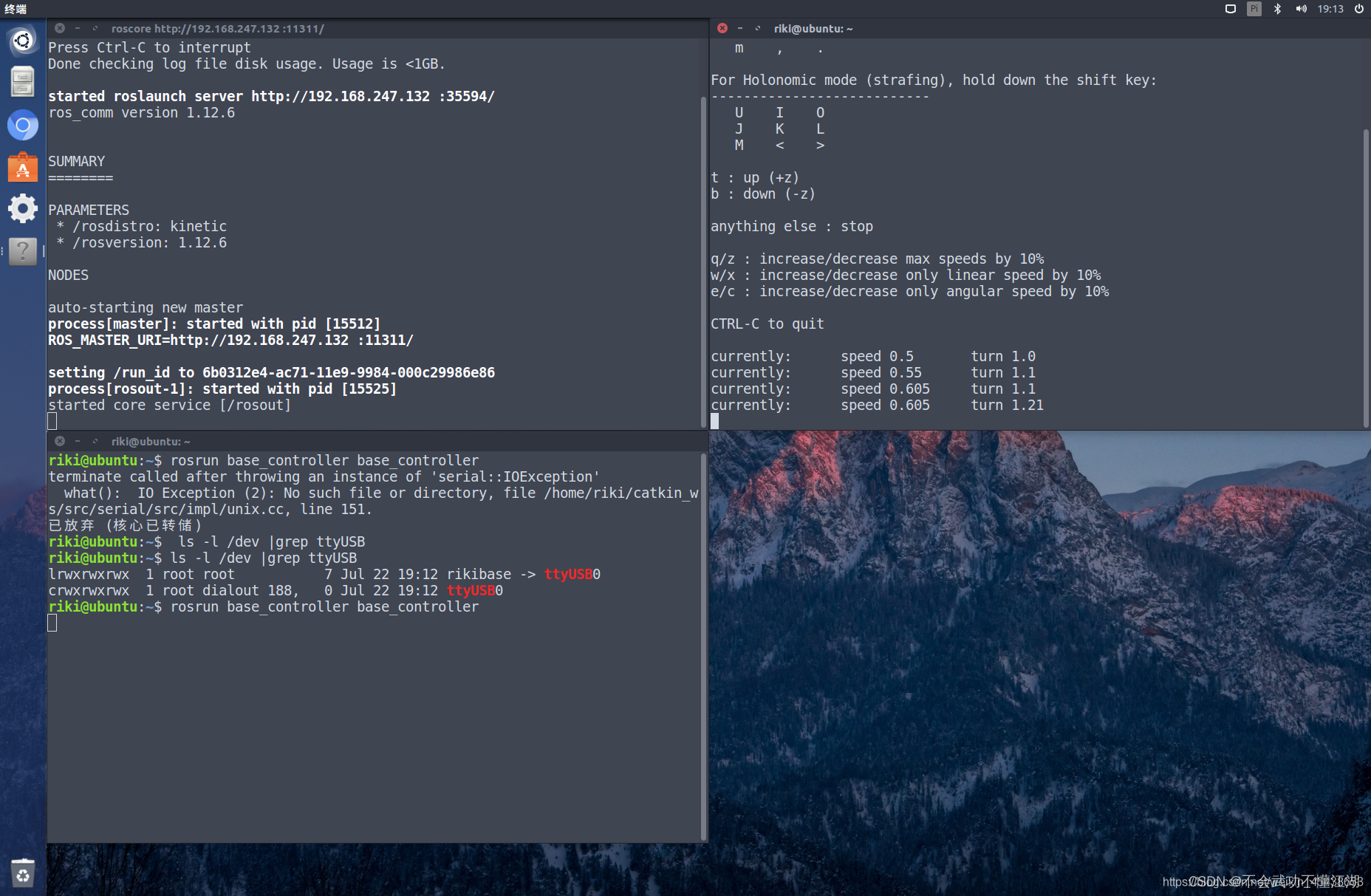
2.启动键盘控制节点
$cd ~/ros_car
$catkin_make
$ roscore
$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
$ rosrun base_controller base_controller















 3539
3539











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











