










前面三个文章讲的是模拟的主流程。而splishsplash作为一个图形学算法开发人员的工具,最大的特点是方便植入和测试新算法,尤其是非压力梯度力算法。
入口
在TimeStepDFSPH.cpp的第125行:
sim->computeNonPressureForces();
这就是非压力梯度力的入口。
F11步进,到Simulation.cpp的496行
fm->computeViscosity();
这里计算粘性力,其中fm是FluidModel类指针
F11再次步进,到FluidModel.cpp的439行,这里判断一下是不是选择了粘性力。如果没选,m_viscosity是个空指针。
if (m_viscosity)
m_viscosity->step();
再次步进
利用多态性,step函数就会跳转到你具体选择的粘性力模型的step函数处。
控制流
从main函数开始,到Viscosity_Weiler2018::step()函数
- main()中调用base->run()
- SimulatorBase::run()中调用runSimulation()
- SimulatorBase::runSimulation()中调用m_gui->run()
- Simulator_GUI_imgui::run()中调用MiniGL::mainLoop()
- MiniGL::mainLoop()中调用idlefunc()
- SimulatorBase::timeStep()中调用Simulation::getCurrent()->getTimeStep()->step()
- TimeStepDFSPH::step()中调用sim->computeNonPressureForces();
- Simulation::computeNonPressureForces()中调用fm->computeViscosity();
- FluidModel::computeViscosity()中调用m_viscosity->step()
- 调用Viscosity_Weiler2018::step()
粘性力的step函数
我们这里选择的粘性力模型是:Viscosity_Weiler2018
进入具体的某个粘性力的step函数以后,一般是先取出一些数据(如粒子数目,支持半径,时间步长等)存储到局部变量里。而取出的方法靠FluidModel类型的指针,一般叫做m_model。
m_model定义于NonPressureForceBase.h的第15行
protected:
FluidModel *m_model;
由于是protected类型,所有派生类都会继承这个成员变量。粘性力也属于NonPressureForceBase类的派生类。
粘性算法
所有的流体仿真问题最后都会变成Ax=b问题
算法分为三部分:
- 准备矩阵A
- 准备矩阵b
- 利用Eigen求解Ax=b
为此我们首先要知道A和b分别代表什么。我们首先看A代表什么?
我们去看Weiler那篇文献: [WKBB18] Marcel Weiler, Dan Koschier, Magnus Brand,
and Jan Bender. A physically consistent implicit viscosity solver for
SPH fluids. Computer Graphics Forum (Eurographics), 2018. URL:
https://doi.org/10.1111/cgf.13349
首先是方程7,计算了拉普拉斯项。这一项乘以粘度mu就是NS方程中的粘性力。
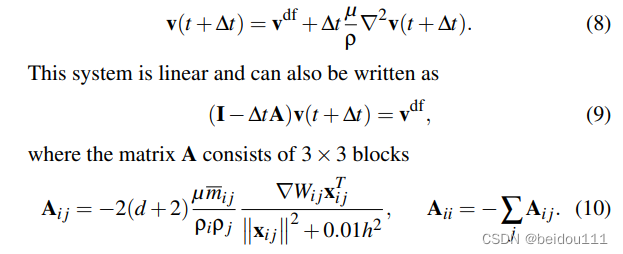
把它时间积分得到方程8
方程8是计算下一时刻的速度的公式。这是要求解的核心公式,下面把它变形成Ax=b的形式。
于是方程9就是变形以后的方程8。
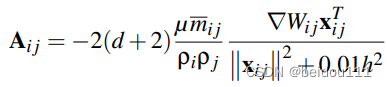
根据方程9,得到了A的表达式,即方程10。
其中下表ij表示粒子i和它的邻居j。mij就是mi和mj的简单平均。
下面是作者的具体讲解,这里懒得翻译了。
大意就是利用CG来求解。并且利用了Jacobi的Preconditioner来加速。还利用了initial
guess来猜测合理初值以加速求解。CG采用matrix free,即一个数一个数地算而不是一下子算一个向量。


我们回到代码
下面这一部分就是准备矩阵A,准备向量b,以及准备preconditioner和initial guess的
MatrixReplacement A(3*m_model->numActiveParticles(), matrixVecProd, (void*) this);
m_solver.preconditioner().init(m_model->numActiveParticles(), diagonalMatrixElement, (void*)this);
m_solver.setTolerance(m_maxError);
m_solver.setMaxIterations(m_maxIter);
m_solver.compute(A);
VectorXr b(3*numParticles);
VectorXr x(3*numParticles);
VectorXr g(3*numParticles);
computeRHS(b, g);
值得指出的是,这些部分都是利用Eigen算矩阵求解的八股文,所以有必要好好研究一下。
其中
MatrixReplacement A(3*m_model->numActiveParticles(), matrixVecProd, (void*) this);
是实例化了一个类MatrixReplacement ,这个类是定义在Eigen中的。它需要三个参数:
- 粒子数*3
- 一个函数指针matrixVecProd
- this指针,指向的是Viscosity类的实例
传递matrixVecProd的这种方法叫函数回调。粗略地讲,函数回调就是做填空题。
我一开始不知道具体要调用的函数是谁。也许是模型A对应的函数,也许是模型B对应的函数。所以我挖个空。等我真正调用的时候,把函数名字填进去。这样就实现了多态性。
总之,这步是准备矩阵A。
其中,
m_solver.preconditioner().init(m_model->numActiveParticles(), diagonalMatrixElement, (void*)this);
是准备preconditioner,与前面类似diagonalMatrixElement也是个函数指针。
其中
m_solver.compute(A);
就是把preconditioner乘到A上,从而完成预处理。
其中
computeRHS(b, g);
就是计算b。
g就是那个initial guess的x0,所以这一步也做了initial guess。
那么,b代表什么呢?我们还是要回到论文。
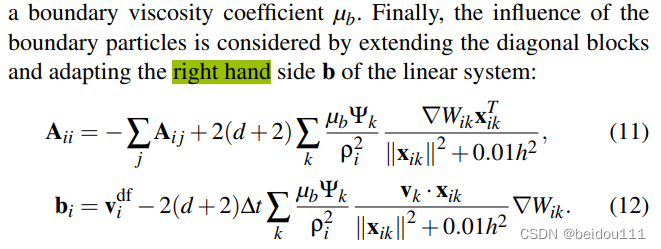
这里指出来,b必须是和边界条件有关系的。由于边界处于粒子缺失(deficientcy,SPH的固有缺陷之一)的特殊状态,粘性也要特殊处理。
他们采用的是Akinci2012的方法。 AKINCI N., IHMSEN M., AKINCI G., SOLENTHALER
B.,TESCHNER M.: Versatile rigid-fluid coupling for incompressible SPH.
ACM Trans. Graph. 31, 4 (2012), 1–8.方程12中的这个b正是我们需要的b
我们现在讲完了准备步骤的1和2.下面就是套八股文用Eigen来计算Ax=b
START_TIMING("CG solve");
x = m_solver.solveWithGuess(b, g);
m_iterations = (int)m_solver.iterations();
STOP_TIMING_AVG;
INCREASE_COUNTER("Visco iterations", static_cast<Real>(m_iterations));
其中
m_iterations = (int)m_solver.iterations();
这一句正是最核心的计算步骤。所有的实际计算在这一步中发生。
当算完以后,最后还差一步将计算好的粘性力加到加速度里。
applyForces(x);
总结一下,大部分都是套用Eigen的八股文,而我们实际关心的部分在于:
- matrixVecProd这个函数准备矩阵A
- computeRHS这个函数准备向量b
- applyForces这个函数将计算好的粘性力加到加速度里
我们现在分别讨论
matrixVecProd这个函数准备矩阵A
值得注意的是,matrixVecProd写了两种版本,一种是有AVX并行加速的(默认开启),一种是没有的。利用#ifdef USE_AVX这个宏来控制开关。
两种代码大同小异。
他们的核心都是这一行
(AVX版本)
delta_ai_avx += V_gradW * ((d_mu_rho0 / density_j_avx) * (vi_avx - vj_avx).dot(xixj) / (xixj.squaredNorm() + h2_001));
(无AVX版本)
ai += d * mu * (model->getMass(neighborIndex) / density_j) * (vi - vj).dot(xixj) / (xixj.squaredNorm() + 0.01*h2) * gradW;
将公式翻译过来就是
∇
W
(
d
μ
ρ
0
/
ρ
j
)
(
v
i
−
v
j
)
⋅
(
x
i
−
x
j
)
∣
∣
(
x
i
−
x
j
)
∣
∣
2
+
0.01
h
2
\nabla W \frac{( d \mu \rho_0 /\rho_j) ( \bold v_i -\bold v_j)\cdot (\bold x_i - \bold x_j)} {||(\bold x_i - \bold x_j)||^2 + 0.01 h^2}
∇W∣∣(xi−xj)∣∣2+0.01h2(dμρ0/ρj)(vi−vj)⋅(xi−xj)
对应论文公式10















 616
616











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









