









前言
DFSPH是目前图形学领域最新最快的压力求解SPH算法,值得被首先关注。
我们将分为三部分来讲解DFSPH
- 学原理:论文讲解
- 读代码:splishsplash源码剖析
- 动手实践:在taichi上从零开始实践该算法
本文属于学原理
DFSPH 原理
在原理方面,参考文献为(摘抄自Splishsplash):
-
[BK15] Jan Bender and Dan Koschier. Divergence-free smoothed particle hydrodynamics. In ACM SIGGRAPH / Eurographics Symposium on Computer Animation, SCA '15, 147-155. New York, NY, USA, 2015. ACM. URL: http://doi.acm.org/10.1145/2786784.2786796
-
[BK17] Jan Bender and Dan Koschier. Divergence-free SPH for incompressible and viscous fluids. IEEE Transactions on Visualization and Computer Graphics, 23(3):1193-1206, 2017. URL:http://dx.doi.org/10.1109/TVCG.2016.2578335
-
[KBST19] Dan Koschier, Jan Bender, Barbara Solenthaler, and Matthias Teschner. Smoothed particle hydrodynamics for physically-based simulation of fluids and solids. In Eurographics 2019 - Tutorials. Eurographics Association, 2019. URL: https://interactivecomputergraphics.github.io/SPH-Tutorial
参考网站(就是第三个参考文献里的,里面还包含了PPT)
https://interactivecomputergraphics.github.io/SPH-Tutorial/
我们今天就关注第一篇论文,就是Jan Bender & Dan Koschier 2015年发表的论文。这是最早的文献。
所谓DFSPH算法,关注的是如何快速求解压力。
首先从NS方程入手
∇
⋅
v
=
0
\nabla \cdot v=0
∇⋅v=0
D
v
/
D
t
=
−
(
1
/
ρ
)
∇
p
+
ν
∇
2
v
+
f
/
ρ
Dv/Dt = - (1/\rho) \nabla p + \nu \nabla^2 v +f /\rho
Dv/Dt=−(1/ρ)∇p+ν∇2v+f/ρ
上面NS方程组,未知量是v。但是我们不知道的还有两个量:密度和压力。
两者是相互关联的。求出一个,就能求出另一个。但是关联的关系并不是显式的,而是很复杂的。此外,我们发现两个方程是很难联立解的。一种办法就是把第一个方程改造改造,带入到第二个方程里。
怎么改造第一个方程呢?我们不妨改造改造,把它当作一种限制条件好了。由于它恰好是“速度的散度等于0”这一数学含义。我们就称这种限制条件为无散度条件。下面我们会详细讲怎么改造。改造之后,我们的第一个方程(连续性方程)将变换为关于压力的方程,被称为压力泊松方程(PPE)。这是重点1。
另一方面,怎么把另一个未知量密度改造一下呢?我们知道,在不可压缩流体之中(大致认为速度<30%音速的流体为不可压缩的),密度是不可能改变的。所以我们应该限制密度,这种限制条件被称为常密度条件。
于是我们就把压力和密度这两个未知量改造成了两个限制条件。
- 无散度条件–压力
- 常密度条件–密度
施加这两个条件,都会造成一些代价。在流体力学中,这个代价就是引入数值上的代价。
无散度条件:造成体积损失
常密度条件:造成密度震荡
体积损失的原因:首先,无散度条件即速度的散度为0。而速度的散度恰好就是体积增量。(如果不明白,想想高斯定理。如果还不明白,想象一个正方体,它的六个面都向外有通量,而为了保证质量守恒净通量一定为0,也就是进出动态平衡。)而在施加限制条件的时候,一定会造成某些数值上的截断误差,这些误差会随着迭代不断积累,要么造成体积增大了,要么造成体积减少了。而一般是体积减少(因为体积增大是不能忍受的,空间中不能凭空产生物质,宁可减少也不能增大)。
密度震荡原因:这个好理解。就是因为你在限定的时候,一定会出现超调的情况。比如我想要密度为1000,而现在密度为1200,那么我就减少他。但是减少多少是很难把控的。例如我乘以0.8,就得到了960,就导致调的过小了。于是再次调大,乘以1.05,得到1008。如此往复,虽然有时候能够震荡着逐渐收敛,但是有时候就会一直震荡。
我们接下来分别具体讲怎么改造两个限制条件的。
我们分别称其为:
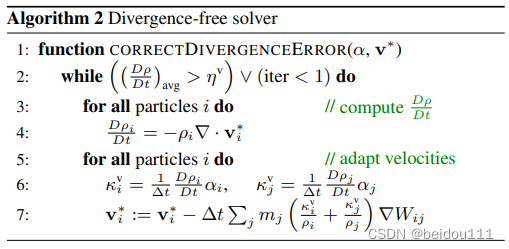
divergence-free solver
constant density solver
divergence free solver
我们的目的就是保证
∇
⋅
v
=
0
\nabla \cdot v = 0
∇⋅v=0
无散度条件还有另外一种形式 D ρ / D t = 0 D\rho / Dt = 0 Dρ/Dt=0 这个形式和上面的形式完全等价,不信你看:
D ρ / D t = ∂ ρ / ∂ t + ρ ∇ ⋅ v = 0 D\rho / Dt = \partial \rho/\partial t + \rho \nabla \cdot v = 0 Dρ/Dt=∂ρ/∂t+ρ∇⋅v=0
这是对密度的全导数(或者叫物质导数material derivitive)。第一项是密度随时间的变化。第二项是由于流动所造成的密度变化,也称之为对流导数(convective derivative),或者叫平流导数(advective derivative)。
where ∂ ρ / ∂ t = 0 \partial \rho/\partial t = 0 ∂ρ/∂t=0 是因为密度不变。 于是两边再除以rho,即得到了第一个方程。
证毕。
我们的目的就是消除这个误差。让它在迭代中接近0。
怎么让它接近0呢?我们想到,流体粒子之所以不会过密的原因是:一旦过近,他们就会产生排斥力。这个力正是保证不可压缩性的根源。而这个力,正是压力梯度力。
所以思路是:只要我们找到正确的压力梯度力,让粒子的疏密程度恰好满足无散度条件就好了。
单位体积的压力梯度力正是
f
i
p
=
−
∇
p
i
f_i^p=-\nabla p_i
fip=−∇pi
为什么会有负号呢?因为粒子从压力高的地方被推向压力低的地方。
从而我们只要找到正确的
∇
p
i
\nabla p_i
∇pi
就可以了。
那去哪找呢?理想气体状态方程给了我们思路。我们知道,对一个物体施加的压力越大,密度越大。因为它被挤压了嘛!但是这个关系显然不是简单的线性关系。(WCSPH把它简化为线性关系,所以简单却又有问题)
虽然不是线性关系,但是我们在计算机中,早晚要转化为线性关系。不如引入暂且把它当成线性的,后面可以动态变化!这样即使不是线性的关系,也能有个简单好用的方案。这就比用一个常数得到了极大的进步。
后面是推导过程。我们这里先不讲。有空再说。我们直接给出结论。
我们的目的是建立如下类似线性的关系
∇
p
i
=
κ
i
v
∇
ρ
i
\nabla p_i = \kappa_i^v \nabla \rho_i
∇pi=κiv∇ρi
一定要记住其中的kappa是动态的!不是一个常数!
我们暂且称kappa为stiffness parameter。我们这里直接给出结论,跳过推导过程:
κ
i
v
=
(
1
/
Δ
t
)
(
D
ρ
i
/
D
t
)
α
i
\kappa^v_i = (1/\Delta t) (D\rho_i /Dt) \alpha_i
κiv=(1/Δt)(Dρi/Dt)αi
α
i
=
ρ
i
∣
∑
j
m
j
∇
W
i
j
∣
2
+
∑
j
∣
m
j
∇
W
i
j
∣
2
\alpha_i = \frac{\rho_i}{|\sum_j m_j \nabla W_{ij}|^2+\sum_j|m_j \nabla W_{ij}|^2}
αi=∣∑jmj∇Wij∣2+∑j∣mj∇Wij∣2ρi
注意到alpha分母两项的唯一区别在于:先求和再平方vs.先平方再求和
我们把kappa带回压力梯度那个公式。就得到了正确的压力梯度力。
值得注意的是,因为压力梯度力是对称力,即粒子i施加给粒子j之后,粒子j也应该等值反向地施加回粒子i。这就是牛顿第三定律。这就要用对称形式的SPH离散公式。
于是粒子i所受的压力梯度力就应该等于
f
i
p
=
−
m
i
∑
j
m
j
(
κ
i
v
ρ
i
+
κ
j
v
ρ
j
)
∇
W
i
j
f^p_i = -m_i \sum_j m_j (\frac{\kappa^v_i}{\rho_i}+\frac{\kappa^v_j}{\rho_j})\nabla W_{ij}
fip=−mij∑mj(ρiκiv+ρjκjv)∇Wij
加速度就是力除以质量,所以下一时刻的速度应该更新为:
v
i
:
=
v
i
−
Δ
t
f
i
p
/
m
i
v_i :=v_i -\Delta t f^p_i/m_i
vi:=vi−Δtfip/mi
这个kappa不可能一次就是正确的,为此我们要用一个迭代循环把他保住,直到速度散度很小
算法流程就总结为如下表格
constant density solver
这一部分与上面类似。
我们的目标是
ρ
i
∗
−
ρ
0
=
0
\rho_i^* - \rho_0 = 0
ρi∗−ρ0=0
其中rho0是静止密度,也就是物理上真实的密度。而rho*只是计算过程中的一个计算值而已。我们要让计算出来的密度尽量接近静止密度rho0。
我们的思路是:找到正确的压力梯度力,使密度接近静止密度。
那么同样是改造压力梯度力,让它乘以一个动态的系数后,得到密度。
我们同样跳过推导过程,直接给出结论。
κ i = 1 Δ t 2 ( ρ i ∗ − ρ 0 ) α i \kappa_i = \frac{1}{\Delta t^2} (\rho_i^* - \rho_0)\alpha_i κi=Δt21(ρi∗−ρ0)αi
关键就在于:这个alpha和上面的alpha是一样的!所以我们可以重用以节约大量计算量。这正是DFSPH速度快的核心原因之一。
下面带回压力梯度力的公式是完全一致的,这里就不写了。直接写出算法流程。
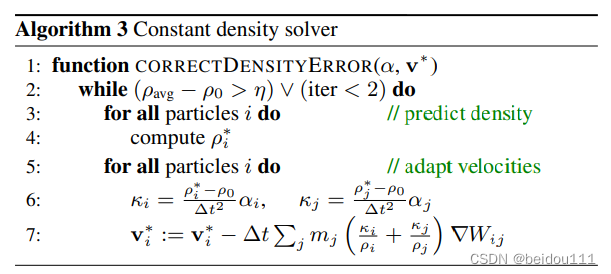
值得一提的是,第4步是预测一个密度rho*,这个rho*就是迭代跳出的条件。
它的公式如下

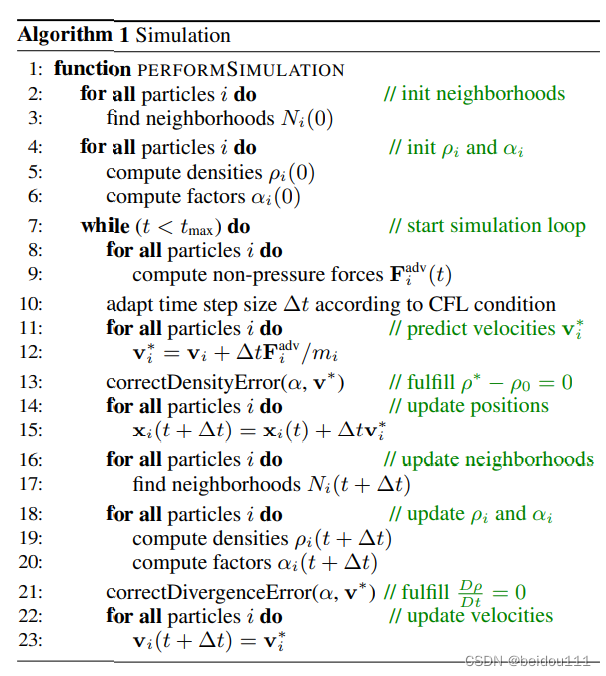
整个算法流程
DFSPH整个算法流程和其他的压力求解器没有太大的区别。
可以粗略地分为几大步:
- 邻域搜索
- 计算密度
- 计算非压力梯度力
- 更新无压力驱动的速度位置
- 计算alpha
- constant density solver
- divergence-free solver
- 更新有压力驱动的速度位置
如果采用自适应时间步长,可以加到第4步以后














 308
308











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









