






在开始之前,先了解下nvidia jetson设备开发中常涉及到的一些概念,请参考博主的这篇文章。
nvidia jetson agx orin开发者套件初始的jetpack包括jetson linux ubuntu20.04和cuda等各类组件,可以根据项目需要使用sdkmanager进行手动刷机以更换jetpack版本及ubuntu版本,刷机教程可参考NVIDIA官网教程和这篇博文。本项目需要用到ROS2-humble和Autoware,故在jetson agx orin上安装jetpack sdk6.0(ubuntu22.04、cuda12.2)。
1.安装浏览器
sudo apt update
sudo apt install chromium-browser
2.安装中文输入法
(1)在系统设置的语言中添加中文选项
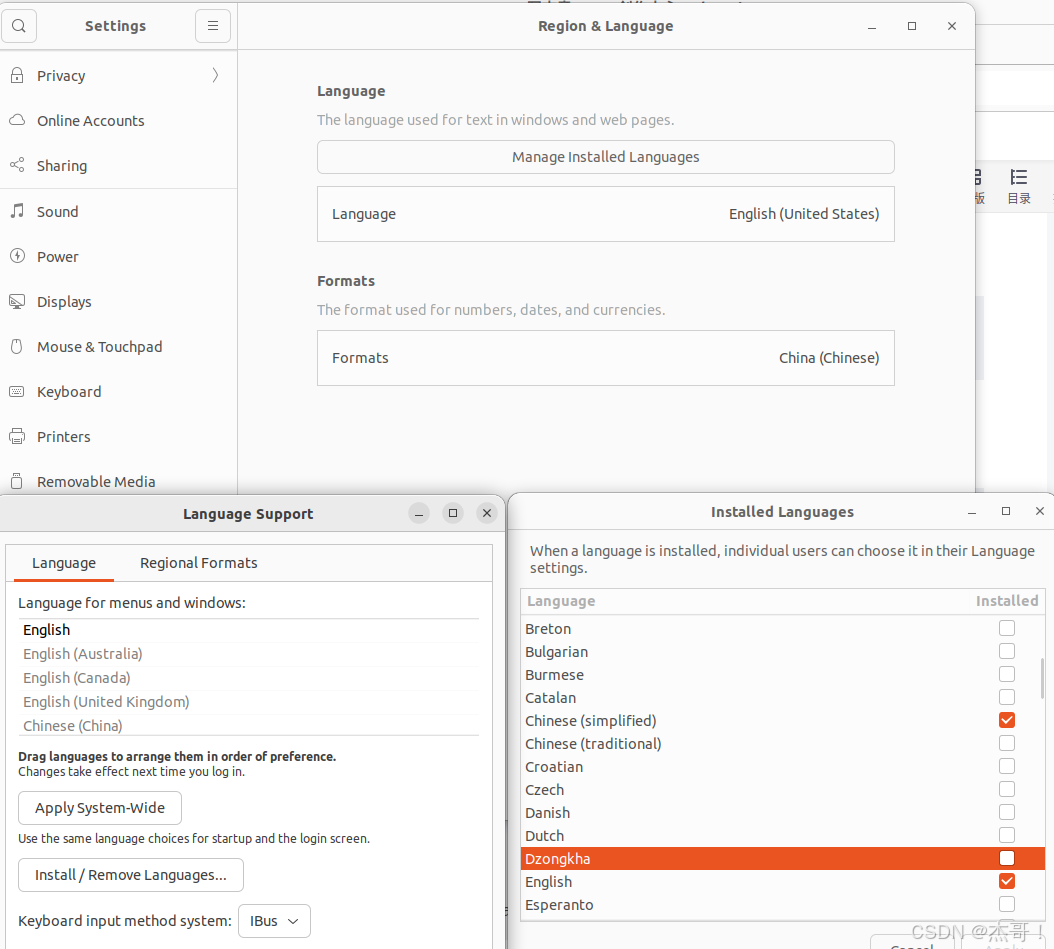
(2)安装中文输入法
sudo apt update
sudo apt install ibus-pinyin
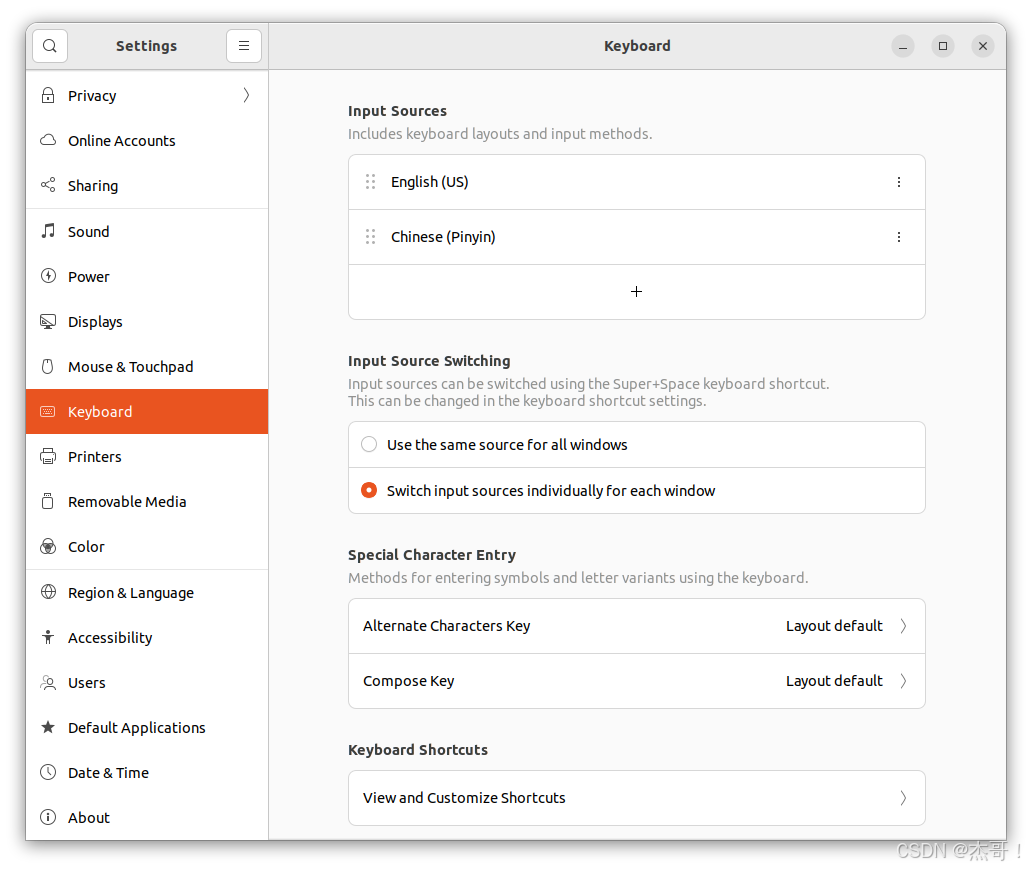
(3)配置中文输入法
ibus-daemon --xim --replace --daemonize
gsettings set org.gnome.desktop.input-sources sources "[('xkb', 'us'), ('ibus', 'pinyin')]"
3.安装JetPack
检查L4T版本
cat /etc/nv_tegra_release
安装JetPack组件
sudo apt update
sudo apt dist-upgrade
sudo reboot
sudo apt install nvidia-jetpack
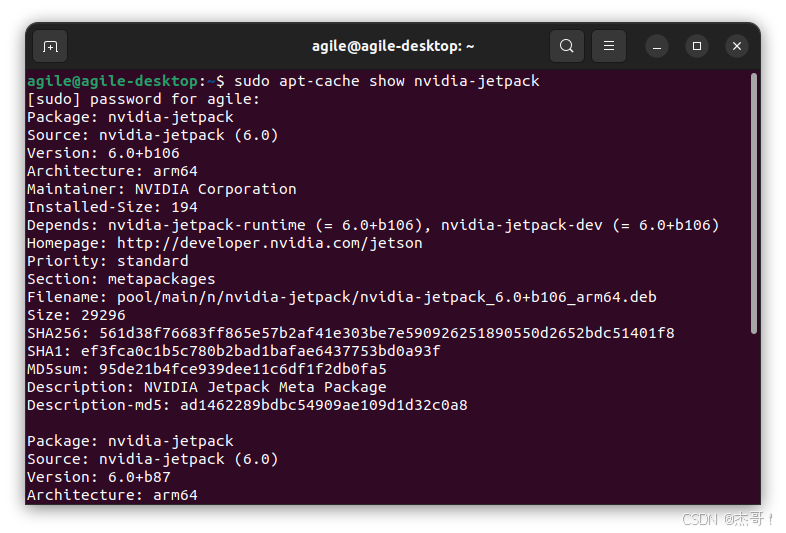
查看JetPack版本信息,输出如下图所示
sudo apt-cache show nvidia-jetpack
4.安装jtop
jtop是jetson系列特有的系统监控工具,安装方法如下:
sudo apt install python3-pip
sudo -H pip3 install -U pip
sudo -H pip install jetson-stats
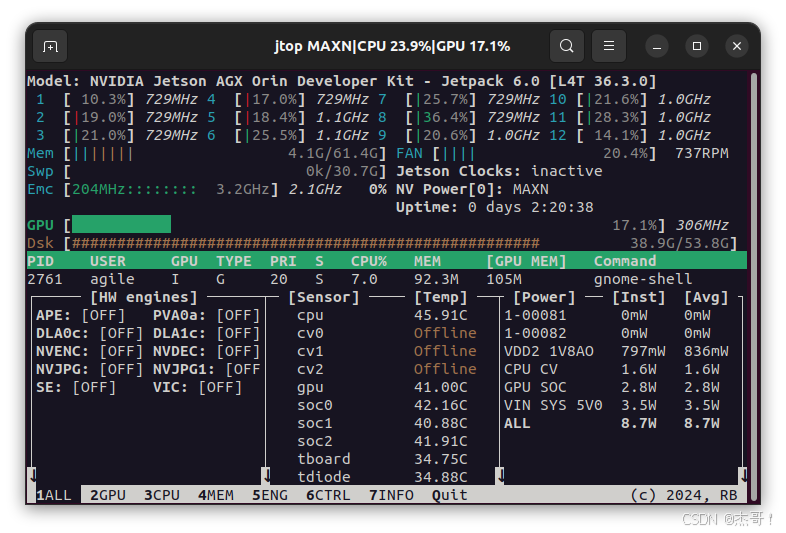
在终端输入jtop,运行jtop,输出如下图所示。
jtop
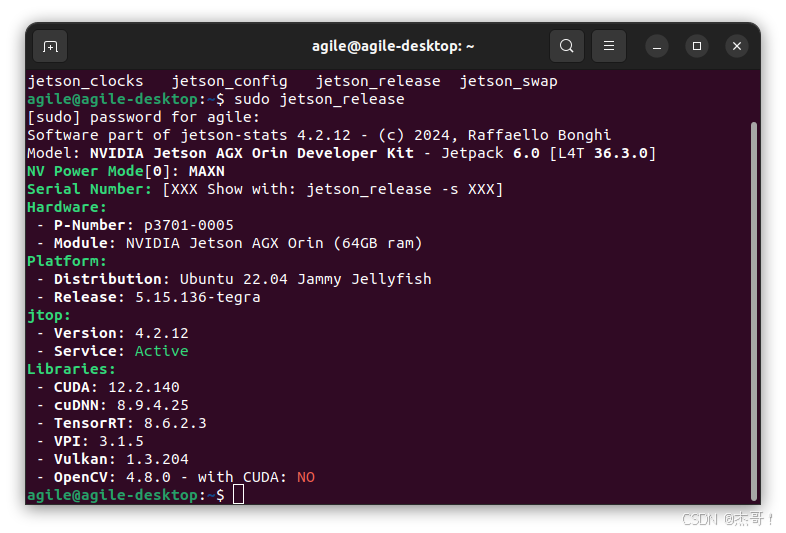
可以使用sudo jetson_release命令查看当前jetson设备信息,输出如下图所示
sudo jetson_release
5.安装PyTorch、torchvision和torchaudio
PyTorch需要根据jetpack版本下载对应的NVIDIA提供的whl文件进行安装,下载链接如下:
PyTorch for Jetson - Announcements - NVIDIA Developer ForumsBelow are pre-built PyTorch pip wheel installers for Jetson Nano, TX1/TX2, Xavier, and Orin with JetPack 4.2 and newer. Download one of the PyTorch binaries from below for your version of JetPack, and see the installat…![]() https://forums.developer.nvidia.com/t/pytorch-for-jetson/72048
https://forums.developer.nvidia.com/t/pytorch-for-jetson/72048
下载完成后使用pip进行安装,在文件保存目录下打开终端,使用以下命令进行安装
pip install torch-2.3.0-cp310-cp310-linux_aarch64.whl
pip install torchaudio-2.3.0+952ea74-cp310-cp310-linux_aarch64.whl
pip install torchvision-0.18.0a0+6043bc2-cp310-cp310-linux_aarch64.whl
6.安装ROS
使用鱼香ROS一键安装ROS,不要清理第三方源!!!
wget http://fishros.com/install -O fishros && . fishros

















 3035
3035

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









