







研究后发现Ros与STM32 都是通过串口 TTL转USB 的方式连接到USB
A:有两种形式 一种 使用 ros-kinetic-serial 中的py 包用的ROS的serial功能包
B:另一种则是使用编写的c的liunx底层的驱动方式 通过将ros移植在STM32中通过串口直接订阅
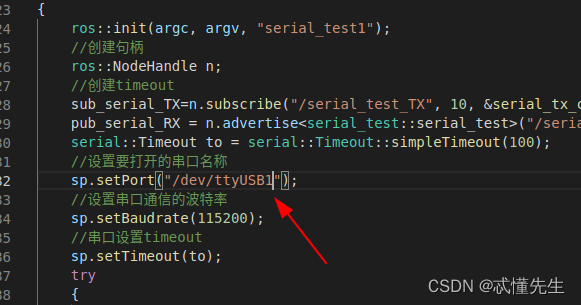
C:前阶段大致的思路是 先绑定 ubantu的串口 usb0 然后打开 然后定义通讯方式
---------------------------------------------------------------------------------------------------------------------------------
本章先从ubantu固定串口开始入手,因为需要不得不再添加一块CH340
在原来的基础上增加一个ttyUSB进行串口通信 也称有线控制
linux系统插入多个USB串口设备时,串口的编号不是固定的,与串口上电的顺序有关。
为了解决每次上电顺序不同,或插入顺序不同的问题,
可以将USB设备固定到某一端口位置,映射成自己的设备名字。
---------------------------------------------------------------------------------------------------------------------------------
首先基本操作查看自己当前设备上的USB
lsusb
lsusb -t查看当前USB1的详细信息
udevadm info -a -n /dev/ttyUSB1
udevadm info --name=/dev/ttyUSB1 --attribute-walk
查看自己当前USB的挂在情况
ls -l /dev |grep ttyUSB赋予当前窗口启动的权限
sudo chmod 777 /dev/ttyUSB0
--------------------------------------------------------------------------------------
绑定串口的方式又存在两种:
A:根据电脑USB硬件端口绑定,只要插入该USB端口即为设定设备名
同类型厂家设备也有效,固定的是工控机本体的端口号,需要固定设备插入位置
<1> 查看usb
lsusb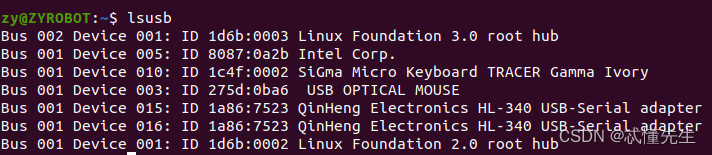
<2> 再插入或打开USB设备,输入
ls /dev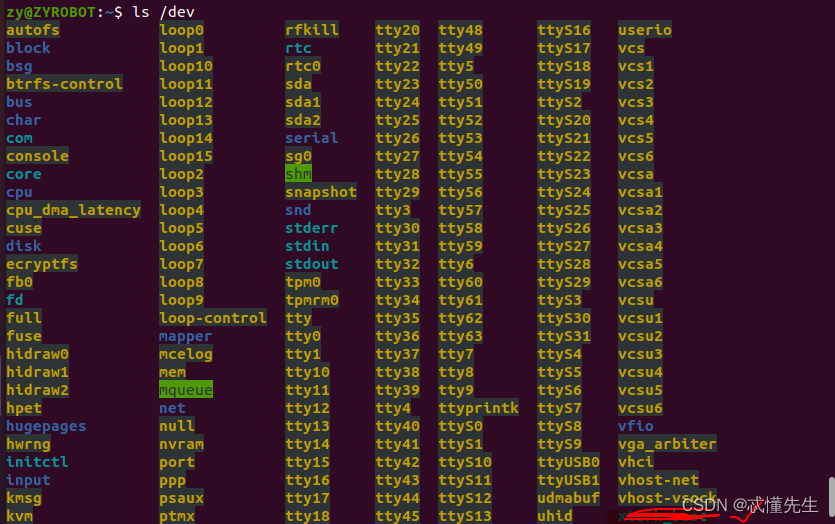
<3> 找到USB设备的名称(确定当前各个设备的串口名字,如机械臂是ttyUSB1,激光雷达是ttyUSB0),然后输入
udevadm info --attribute-walk --name=/dev/ttyUSB1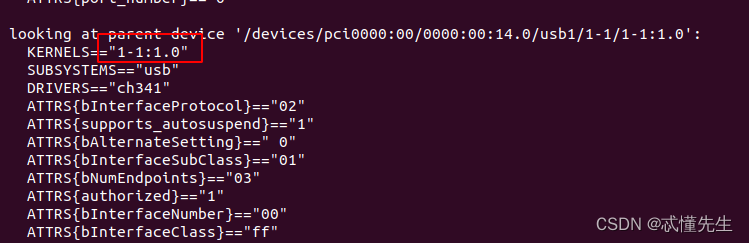
可以得知该设备现在使用的端口号为“1-2.4.4:1.0”,接下来开始编写绑定规则
<4>创建rules文件

<5>第一行是方式二 第二行为加入代码互补冲突互不影响

ACTION=="add",KERNELS=="1-2.4.4:1.0",SUBSYSTEMS=="usb",MODE:="0777", SYMLINK+="rplidar"<6>复制文件到达当前的系统目录下

cp /home/zy/test_ws/src/serial_test/udev/com.rules /etc/udev/rules.d
<7>软件重新装载软件重新开始
service udev reload
service udev restart<8>硬件☕插拔保存文件并重启PC,在终端中输入
ls -l /dev |grep ttyUSB
可以看到这里已经完成了这两个USB的分别输入
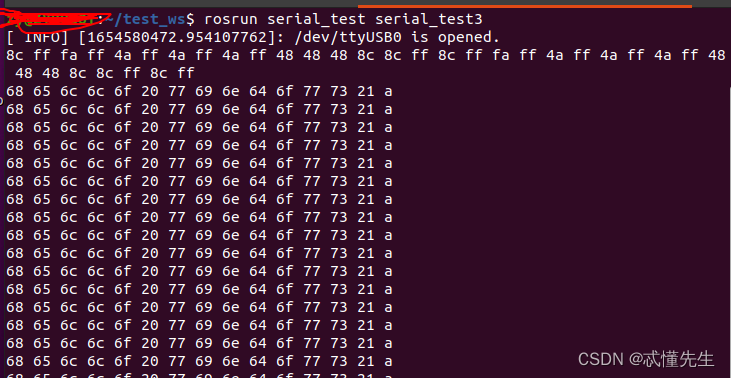
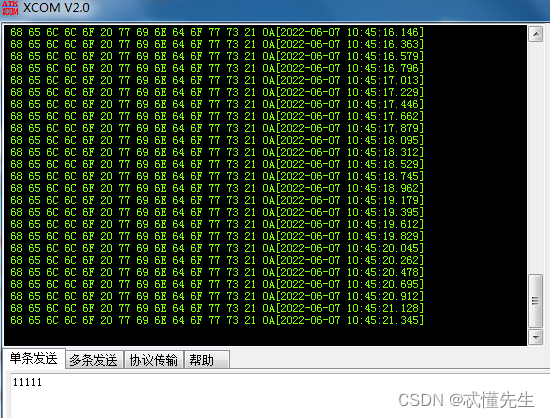
<9>测试一些打开USB1能否接收到STM32发出的信息
PS:因为是绑定固定的端口,所以usb的接口不能随意更换位置,考虑以后在HUB上标注各个位置插的设备。
B:根据设备ID绑定
都是不同类型厂家设备时使用,此方法可以不用固定设备插入的位置
<1>查看当前的端口号
lsusb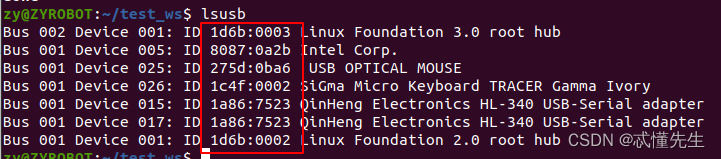
<2>新建一个规则文件:
sudo gedit /etc/udev/rules.d/com_rplidar.rules自定义打开文件写入自定义规则。这里最好新建一个文件,不要覆盖以前的文件了。如果是相同设备还需要额外的辨别参数也可以添加额外的参数。我们只取前面的数值10c4,ea60,,后面的描述不要。
KERNEL=="ttyUSB*" , ATTRS{idVendor}=="10c4",ATTRS{idProduct}=="ea60",MODE:="0777" ,SYMLINK+="ttyRplidar"<3>然后使其作用:
sudo udevadm trigger<4>查看是否成功
ls -l /dev/ttyRplidar
lrwxrwxrwx 1 root root 7 Nov 12 22:22 /dev/ttyRplidar -> ttyUSB0<5>或者
ls /dev/tty*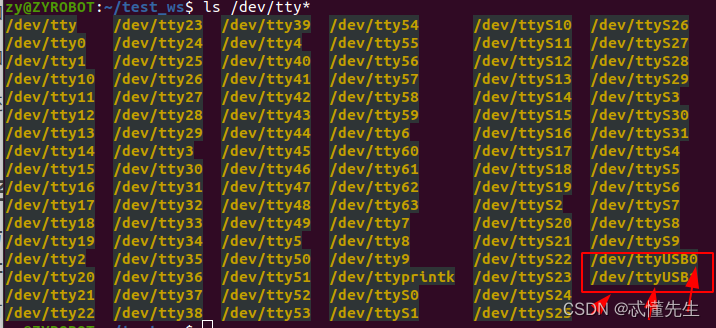
如图,可以看到新增了一个设备,正是我们在规则文件中设置的别名。
如果不行的话先检测规则文件的格式有没有错误,接着将USB拔了再重插。
还有其他额外的设备需要则加一行,方法一样。
补充:
记录USB设备详细信息
udevadm info --name=/dev/ttyUSB0 --attribute-walk这条指令执行后,命令行会打印一大串信息,一直往上翻,找到一快描述如下图所示,
是关于1-1.2的描述,记下其中的ATTRS{idVendor}、ATTRS{idProduct} 和 ATTRS{serial} 的值。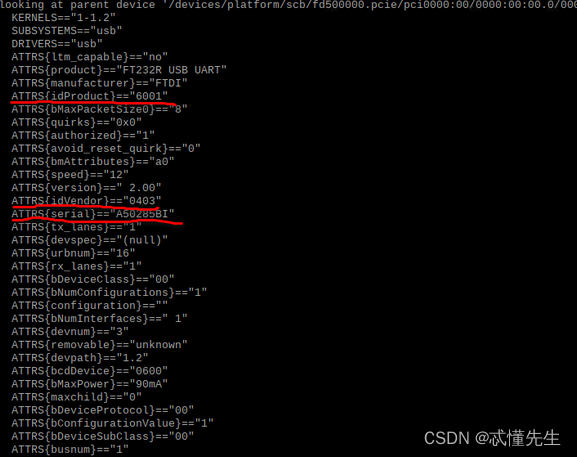
编写USB设备命名规则文件
SUBSYSTEM=="tty",ATTRS{idProduct}=="7523", ATTRS{idVendor}=="1a86", SYMLINK+="RSSICOM"
SUBSYSTEM=="tty",ATTRS{idProduct}=="6001", ATTRS{idVendor}=="0403", ATTRS{serial}=="A50285BI",SYMLINK+="Planectrcom"
SUBSYSTEM=="tty",ATTRS{idProduct}=="6001", ATTRS{idVendor}=="0403", ATTRS{serial}=="AK04WQD8",SYMLINK+="zigbeecom"
其中SUBSYSTEM的内容保持一致,之后的填入之前获取的信息,
最后的SYMLINK的值可以自由发挥,取个自己想要的名字即可。
细心的小伙伴可能已经发现了在第三步编写命名规则的文件中,
第一行并没有写关于ATTRS{serial} 的配置,第二和第三行都写了,
只有在当不同的usb设备的idVendor和idProduct都相同的情况下才需要增加这个参数加以区分。
将新规则应用
sudo udevadm trigger致谢
 http://t.zoukankan.com/miaorn-p-14144854.html
http://t.zoukankan.com/miaorn-p-14144854.html















 294
294











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











