







1. 非误差型车辆横向动力学方程
注:关于轮胎侧偏刚度的正负
- 深蓝课程推导得到的车辆横向动力学返程使用的轮胎侧偏刚度是默认为正数;
- 老王课程推导得到的车辆横向动力学方程使用的轮胎侧偏刚度是默认为负数;
1.1 深蓝课程推导得到的方程:
形式1:
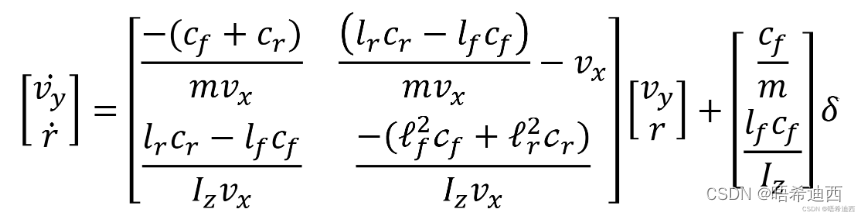
形式2:
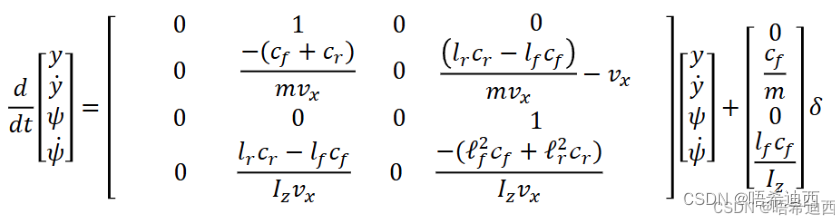
推导过程:第4章:车辆的横向优化控制-CSDN博客
1.2 老王课程推导得到的方程:
形式1:
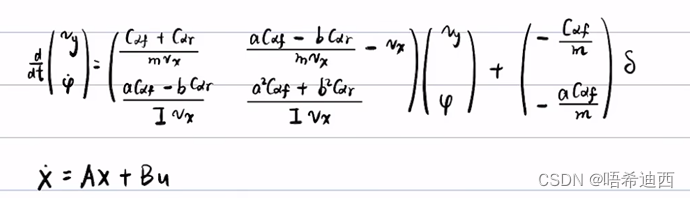
推导过程:如下
1.3 对比形式1的方程
注意:可以发现两个课程所得到的形式1方程,很明显除了轮胎侧偏刚度的正负值取得不一样,其他的一模一样;
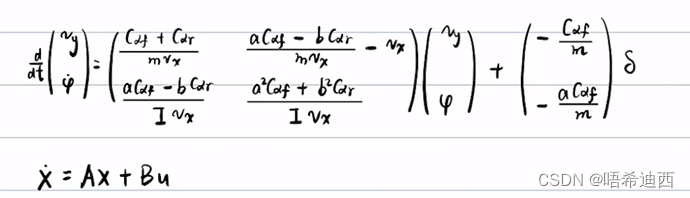
注意:下面我将使用老王课程中的形式1方程 -- 非误差型车辆横向动力学方程,来精确推导出误差型车辆横向动力学方程;
a
a
a
a
a
2. 推导误差型车辆横向动力学方程
注:使用如下方程作为基础开始推导
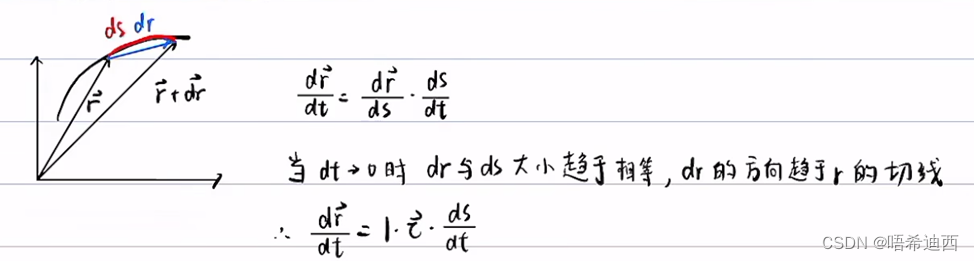
2.1 前导知识:如何计算向量的微分
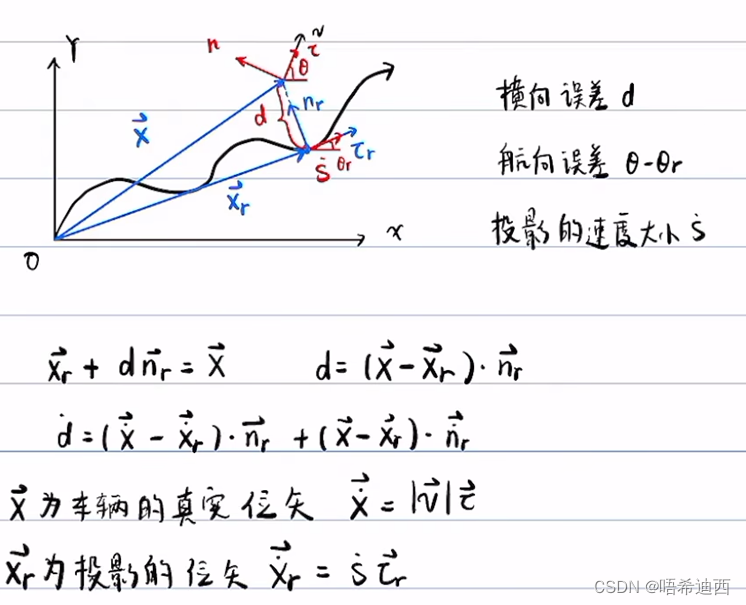
2.2 将非误差型转化为误差型 -- 两个重要公式推导
注:将非误差型转化为误差型有两个重要公式;
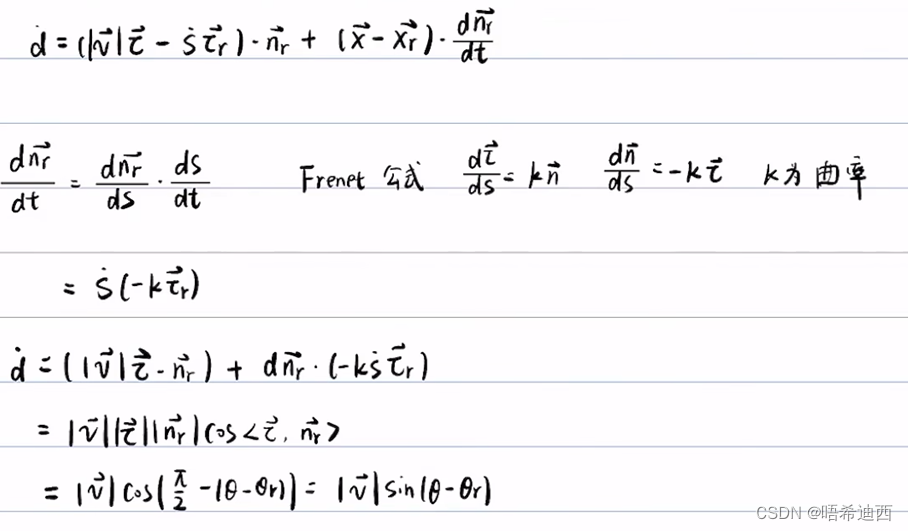
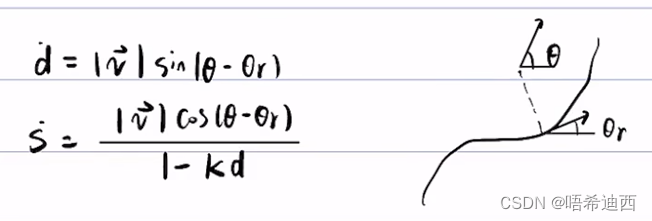
公式1:
a
a
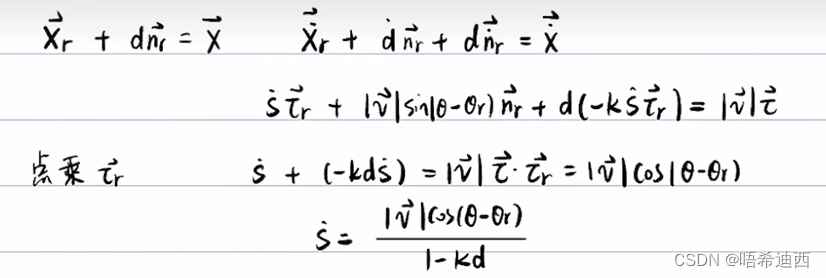
公式2:
a
a
总结:
- 公式中的k是曲率
是投影中车辆速度的大小
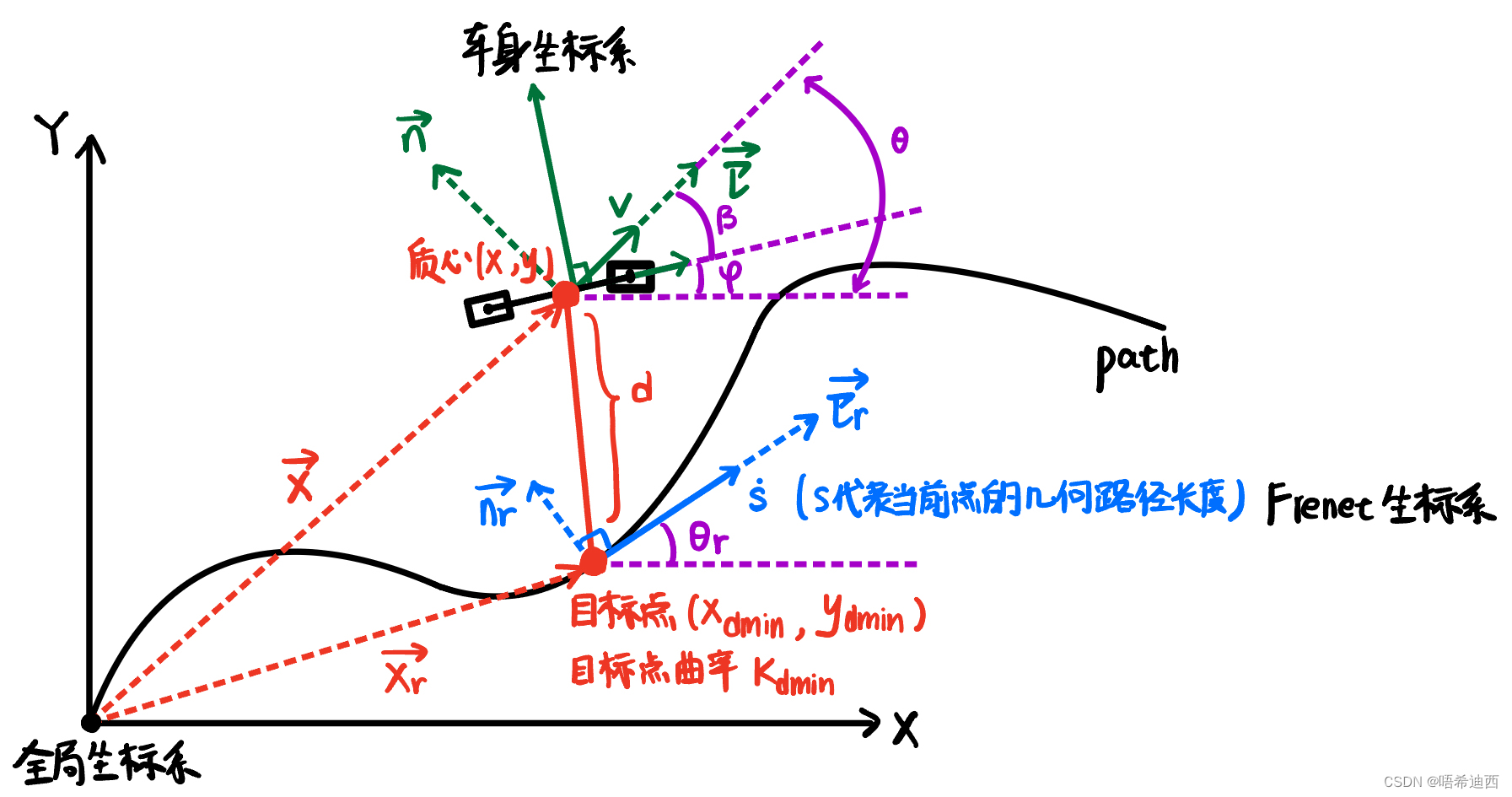
2.3 将非误差型转化为误差型
注:本节主讲如何将 转化为
a
a
Step1:
a
a
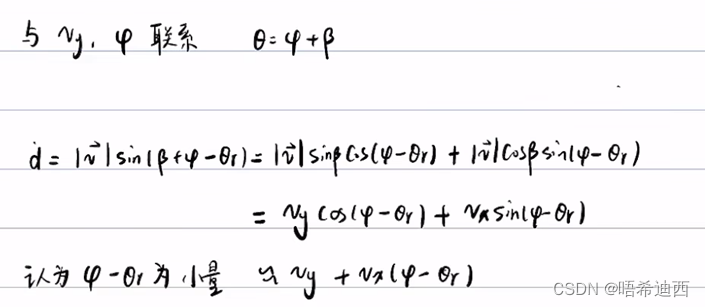
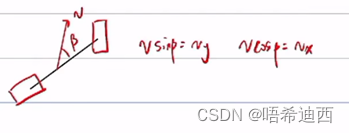
Step2:确定误差型车辆横向动力学方程的状态变量 X 中每个分量的表达式
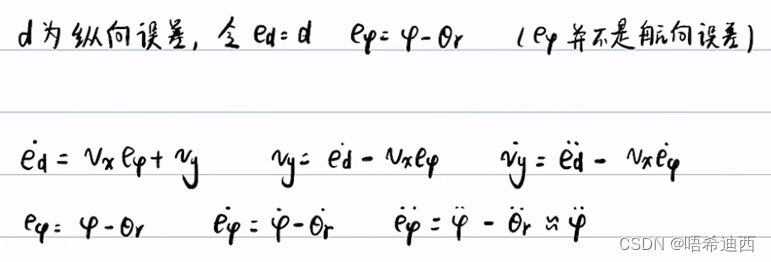
为横向误差
却并不是真正的航向误差,只是近似的航向误差;真正的航向误差应 = φ + β - θr;
解释:上面两步将 Frenet 坐标系中的物理量 /
和车身坐标系中的物理量
/
联系起来了
和
是车身坐标系中的物理量
和
是标量,所以是三个坐标系公用的(
和
是 Frenet 坐标系中定义的物理量,其中
a
a
Step3:开始推导
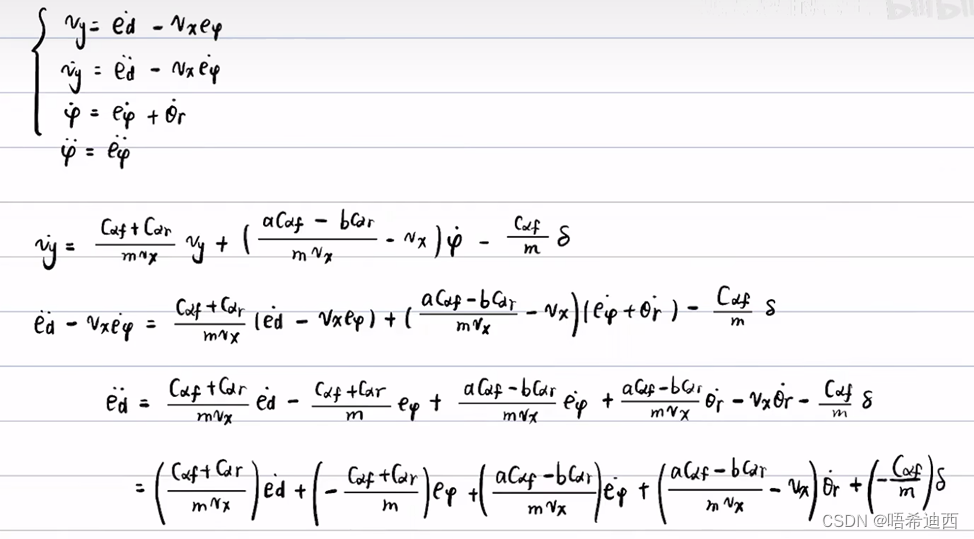
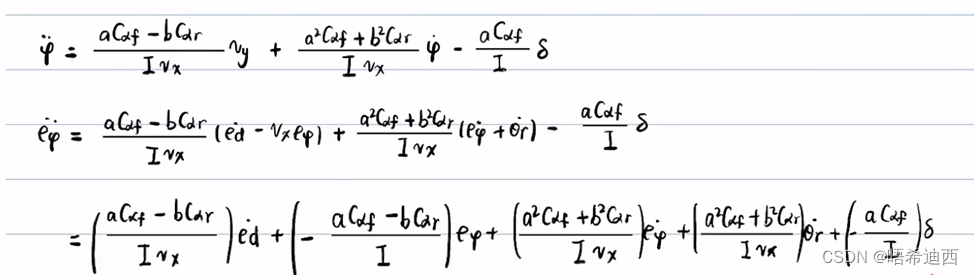
a
a
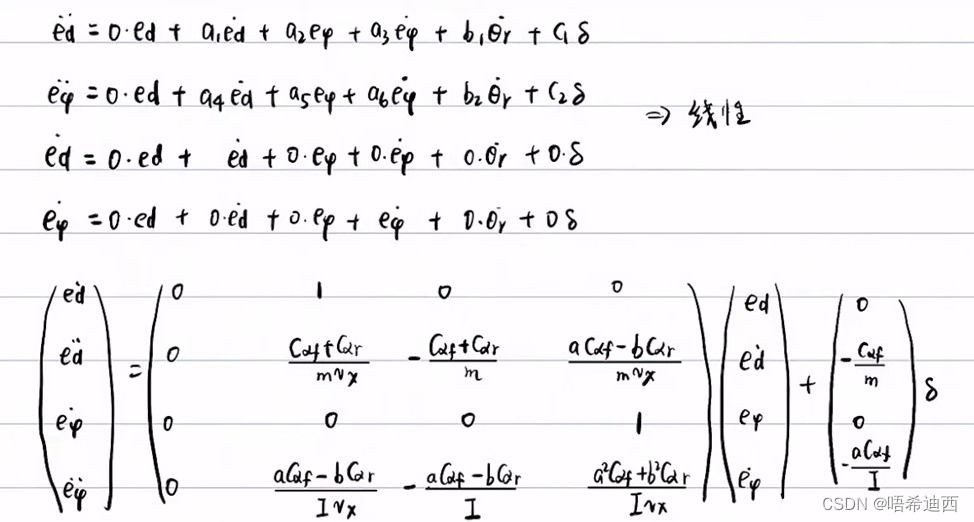
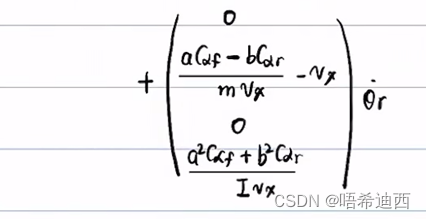
Step4:最终得到误差型的状态空间方程
![]()
2.4 遗留问题
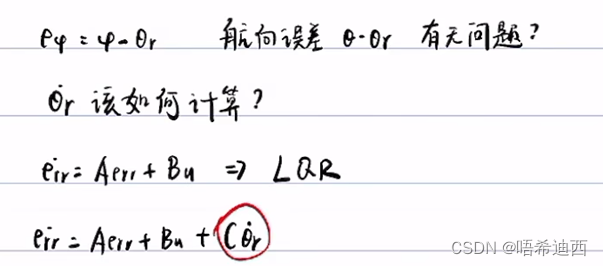
注意:这里因为使用LQR控制而导致留下的小尾巴 ,使用前馈控制来弥补
















 998
998

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









