







微分变换——机械臂的基座坐标系或者是末端执行器的坐标系发生微小的旋转和平移运动导致的末端执行器的位姿发生微小变换。
1.1基座坐标系下的变换
1.2末端执行器坐标系的变换
1.3微分运动的等价变换
1.1基座坐标系下的变换
基座坐标系下的微分变换,是指相对于基座坐标系的微小平移或者旋转运动从而导致机械臂末端执行器的位姿发生变化。
T+dt=trans(dx,dy,dz)Rot(f,dθ)T
末端位姿为T trans(dx,dy,dz)表示微分平移,Rot(f,dθ)表示微分旋转,由于是
参照的是基座坐标系,**所以是左乘微分变换矩阵。**
dt=(trans(dx,dy,dz)Rot(f,dθ)-1)T=Δ*T
在这里直接写出变换矩阵Δ
Δ=[0 -δz δy dx;
δz 0 -δx dy;
-δy δx 0 dz;
0 0 0 1;]
1.2末端坐标系的微分变换
同理,是指相对于末端坐标系的微小运动导致的机械臂末端位姿发生变化。
T+dt=T trans(dx,dy,dz)Rot(f,dθ)
由于是相对末端执行器而言(自身),所以是使用矩阵右乘的方法,去求出之间的变换关系。
(T*TΔ)=dt=T(trans(dx,dy,dz)Rot(f,dθ)-1)
这里同样也有变换矩阵(TΔ)
(TΔ)=[0 -Tδz Tδy Tdx;
Tδz 0 -Tδx Tdy;
-Tδy Tδx 0 Tdz;
0 0 0 1;]
1.3微分运动的等价变换
微分变换的等价变换,是指基座坐标系的微分变换到末端执行器的微分变换之间的关系,一篇论文中说到,就是对于机器人末端的相对位姿变化,是从基座坐标系到末端坐标系的微分变换。
公式是(TΔ)=(T^-1)*(Δ)*(T) ,成立的条件是dt=Δ*T,dt=T*(TΔ);当他们等价时,就会成立。
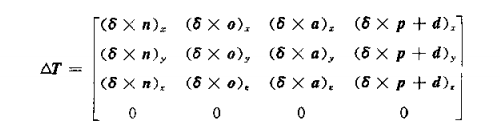
先计算(Δ)(T)

由于(δn)z=-δny+δynz,以此类推,可以得到下面的等式(与上式等价)
然后是计算(T^-1)
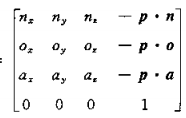
接着根据上面的式子,我们可以的得到:

同样依据等式(左=右)
(TΔ)=[0 -Tδz Tδy Tdx;
Tδz 0 -Tδx Tdy;
-Tδy Tδx 0 Tdz;
0 0 0 1;]
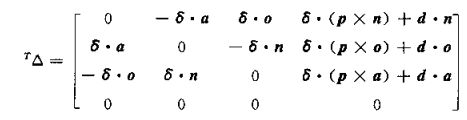
这样子的话,我们就能得到:
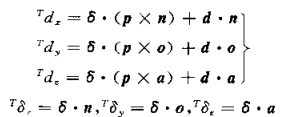
根据上面的式子,我们还可以建立一个矩阵的等式:
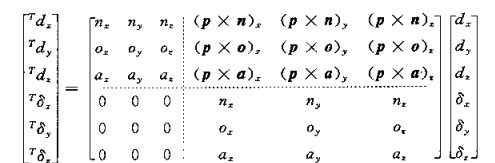
具体是如何使用的,我们下回再讨论。















 1501
1501











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









