







以下为本人自学时摸索的简单原理,可能缺乏一些专业性,一些地方可能存在问题,仅供查考,如果可以请多多指教,麻烦指出告知。
主要原理:投影原理
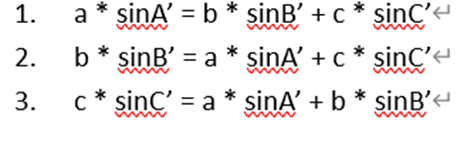
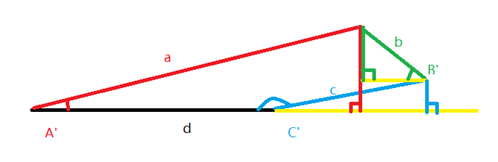
关于机械手的姿态,个人利用投影原理推断为以下三种姿态:
补充:A’,B’以及C’的引入目的是为了投影,所以其值由投影决定。(有段时间没接触了,看到之前数据,发现自己也有点懵)。
注意:以下草图为了更加容易观测,a,b和c比例不准确(即三轴长度比例不统一),实验使用的是a > b > c ( b ≈ c且a>>b+c )。
草图比较简单,请见谅。
- a * sinA’ = b * sinB’ + c * sinC’

*注意:为了观
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1413
1413











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









