







一、前言
之前写过一篇文章(相机内参、外参、畸变系数简介),感觉应该把这几个东西说的还算明白,但是里边并没有深究该如何进行标定,正好在这次学习中进行补充。
我面试时的体验就是,如果你没有那种一眼吊的科研成果,那么项目中再大的创新也就那么样,不如把时间花在了解项目细节上,比如内参标定到底是怎么实现的,而不是面试官问起你这个问题,你只能跟我一样傻笑道我调了opencv的库。。。。。。接着面试官又问,函数的每个输入输出都是什么?对不起,沉默是今晚的康桥。。。。。。哥们都是现用现百度。
二、内参标定流程
-
标定板准备
标定板种类有很多种,棋盘格、圆点阵、ChArUco板。为了避免歧义性——指定的3D角点坐标与算法输出的角点像素坐标存在多种对应关系,棋盘格和圆点阵的关键点阵列尺寸都是奇数×偶数,并且圆点阵是非对称排列的,以保证匹配的唯一性。ChArUco板长很像是一堆二维码,不像前两种板需要所有关键点都出现在视野中,ChArUco板允许出现遮挡。

我只用过前两种,实际用下来感觉精度没有很大差别?但是由于我的应用场景是机器人的手眼标定,所以更喜欢使用棋盘格,因为棋盘格更容易验证标定精度。至于到底哪个更好,好像也没个确切结论,大多数人可能是因为opencv里说非对称圆点阵更好就认为它更好,但是一篇论文中说可能棋盘格会是更好的选择?观点来源
至于标定板的制作,需要考虑到你的精度要求。你当然可以自己打印贴在板子上,但据我自己经验,打印出来的尺寸总跟我设计的尺寸有点差别,不清楚是不是打印设置的原因,还得用尺子去量,并且贴在板子上也不会完全平整,这都引入了误差,只适合于用在一些低精度要求的场景下。也可以直接淘宝解君愁,你会猛的发现,高精度的标定板居然可以那么贵。。。。。
-
拍摄标定图像
在不同位置或角度下,使用相机拍摄多张包含标定板的图像,尽量覆盖整个图像传感器的视场。我之前搞机器人手眼标定是拿了一块标定板,不断变换机器人位姿去采集图像,为了获得更好的效果,两次采集之间的位姿还有要求,采数据搞得我很痛苦,但现在发现是贫穷限制了我的想象,完全可以固定机器人,在视场中摆放各种标定板。

-
对采集到的图像做特征点提取,获得像素坐标
-
对焦距、主点和镜头畸变进行估计
-
计算重投影误差
这边记录一个问题,计算重投影误差只能评估标定好坏?还是说可以做类似反向传播的过程,进一步优化内参参数。(最开始授课老师说可以,但是后边提到的只是其评估作用,比较疑惑)
比较常用的标定方法是张正友标定法,理论推导可以参考这篇链接,写的很详细参考文章
下面仅作为我自己的简单记录,没啥必要看
1. 将图像视作无畸变计算内外参(先算H,再算B,再算A,再求G)
2. 用内外参将3D坐标(认为指定的)变换成像素坐标,视作无畸变坐标
3. 采集图像中提取出的角点是有畸变坐标,无畸变为输入,有畸变为输出,求解畸变系数
4. 循环几次,直至误差满足要求
注:求解的最低要求是,每张图片上至少4个角点以满足对H的求取(齐次矩阵,8个自由度,每个角点uv提供两个方程)。至少3张标定板图片完成对B的求取(B是 A − T A − 1 A^{-T}A^{-1} A−TA−1,3*3对称,所以有6个自由度)。
三、如何提升标定精度
- 提高数据质量:一方面提高标定板制作精度,另一方面采集的数据也要尽量高质量(不同角度、不同距离的数据都要有;要尽量覆盖全部视野;采集到的数据要完整清晰)
- 选取更高精度的模型:张正友标定模型中只考虑了两项畸变系数,并且也不适用于FOV特别大的鱼眼镜头,当FOV超过170°时可以选用OCamCalib模型
- 标定存在随机性,可以多次标定取平均值
四、精度验证
- 观察图像是否正常
- 计算重投影误差:但重投影误差只能评估标定结果在当前数据集上的表现
- 直线度检测(这地方没看明白怎么做的)

五、内外参联合标定
这部分完全听不懂在干什么,课上说这个方法出自mobileye,得查一下
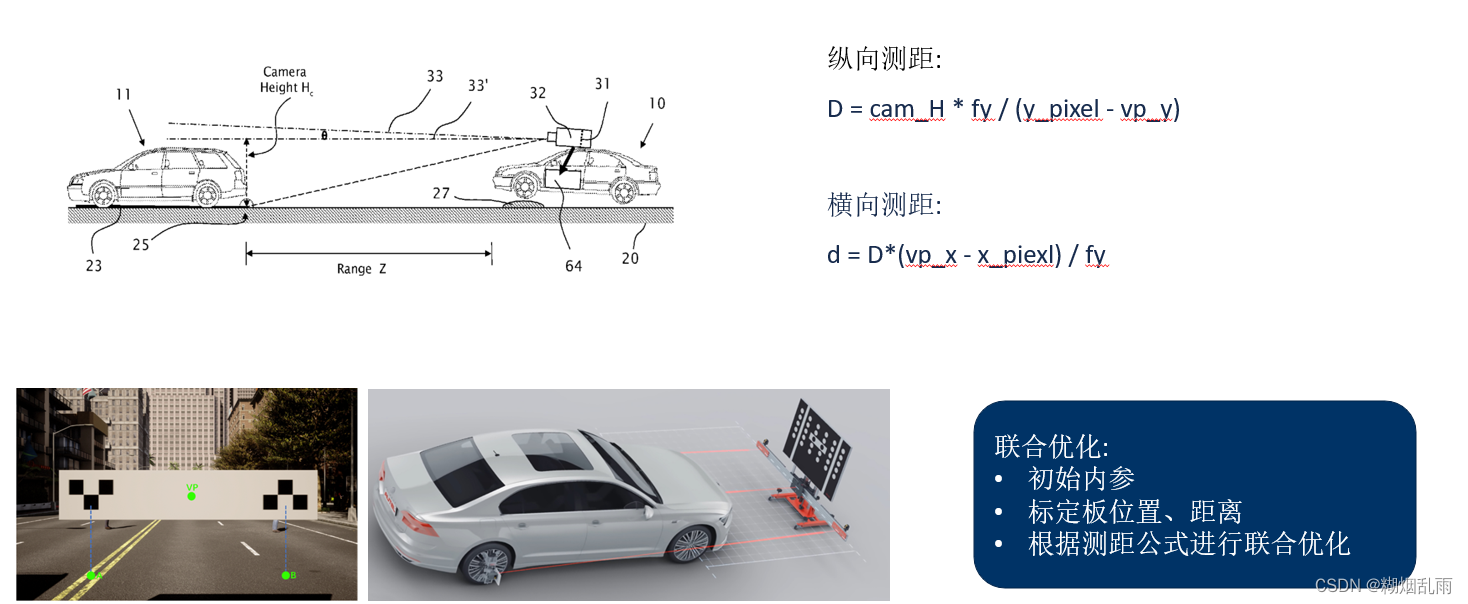
课件里这部分说的是相机和雷达之间的外参,与自车之间的目前还不知道如何标定
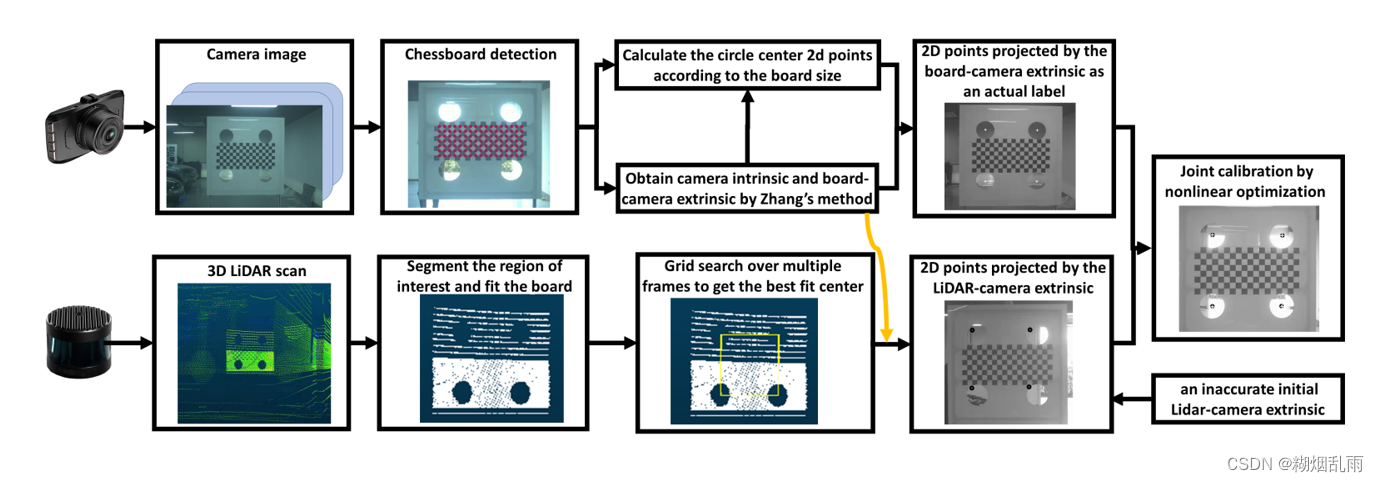
最终目标是希望相机视野中各个区域的像素都能和雷达精确的配准

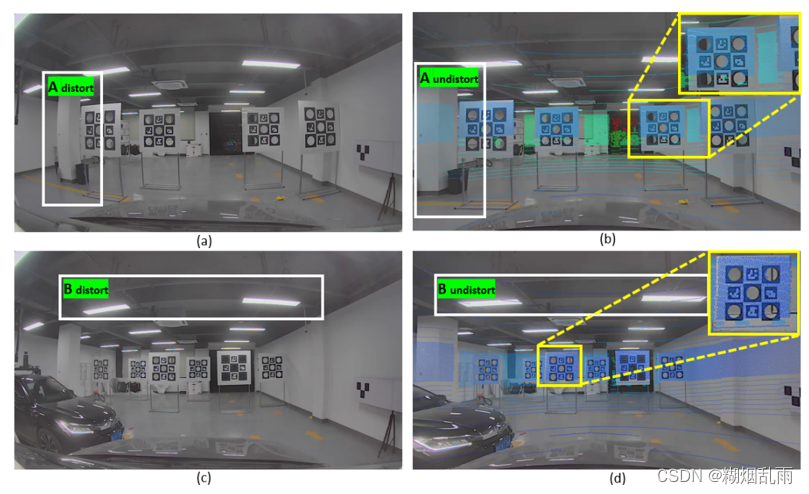
下面的图展示了,分开标定和联合标定的差异,a是分开标定的原图,b是分开标定的结果图,cd是联合标定的图。
尽管b中畸变去除的已经比较好了,但可能是内参标定时候其他系数有误差,导致相机与雷达对不齐。而联合标定会对参数做迭代优化,使得最终结果尽可能对齐。本质上就是开环和闭环的区别喽~
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











