







1. 形变参数
1.1 形变映射
形变映射 ϕ \phi ϕ :静止材料位置 ↦ \mapsto ↦ 形变材料位置
x d e f o r m e d = ϕ ( x r e s t ) \bold{x_{deformed}} = \phi (\bold{x_{rest}}) xdeformed=ϕ(xrest)
1.2 形变梯度
形变梯度 F \bold{F} F :
F ≔ ∂ x d e f o r m e d ∂ x r e s t \bold{F} \coloneqq \cfrac{\partial \bold{x_{deformed}}}{\partial \bold{x_{rest}}} F:=∂xrest∂xdeformed
Note :
- 平移过程中形变梯度保持不变: ϕ 1 = ϕ ( x r e s t ) \phi_1 = \phi(\bold{x_{rest}}) ϕ1=ϕ(xrest) 和 ϕ 1 = ϕ ( x r e s t ) + c \phi_1 = \phi(\bold{x_{rest}}) + c ϕ1=ϕ(xrest)+c 有相同的形变梯度
1.3 变形/静止体积比
变形/静止体积比 J J J :
J = det ( F ) J = \det(\bold{F}) J=det(F)
Note :
- 三维空间中,矩阵行列式的性质,即体积变化倍数
2. 弹性体
2.1 超弹性体(Hyperelasticity)
超弹性材料:应力 – 应变关系 由 应变能密度函数 定义 :
Ψ = Ψ ( F ) \Psi = \Psi(\bold{F}) Ψ=Ψ(F)
直观理解: Ψ \Psi Ψ 是惩罚形变的势函数。
应力 :材料的内部弹性力。
应变 :现在用 形变梯度 F \bold{F} F 代替。
Note :
- Ψ \Psi Ψ 是应变能量密度函数
- ϕ \phi ϕ 是形变映射
2.2 应力张量
应力:代表材料微元施加在其周围为材料微元的内力。
2.2.1 三种常用的应力张量
- Piola - Kirchhoff 应力张量 (PK1):
P ( F ) = ∂ Ψ ( F ) ∂ F \bold{P(F)} = \cfrac{\partial \Psi(\bold{F})}{\partial \bold{F}} P(F)=∂F∂Ψ(F)
(计算简单,是在静止空间计算,需要变换到形变空间)
- 基尔霍夫应力(Kirchhoff stress) :
τ
\tau
τ
- 柯西应力张量(Cauchy stress tensor) :
σ
\sigma
σ
(对称,因为角动量守恒)
2.2.2 关系式
- τ = J σ = P F T \tau = J\sigma = \bold{PF}^T τ=Jσ=PFT
- P = J σ F − T \bold{P} = J\sigma\bold{F}^{-T} P=JσF−T
Note:
- F − T \bold{F}^{-T} F−T :补偿材料变形
- 用 F − T \bold{F}^{-T} F−T 替代 F − 1 \bold{F}^{-1} F−1 :因为变换的是法向量 n \bold{n} n 而不是 x \bold{x} x
2.2.3 牵引力
- t = σ T n \bold{t} = \sigma^T\bold{n} t=σTn
直观来说,将法向量乘以应力张量即可获得材料向周围微元施加的力。
2.3 弹性模量(各向同性材料)
-
杨氏模量 :应力张量与应变张量的比值
E = σ ϵ E = \cfrac{\sigma}{\epsilon} E=ϵσ -
体积模量 :压强关于体积的变化,常用于液体
K = − V d P d V K = - V \cfrac{dP}{dV} K=−VdVdP -
泊松比 :
ν ∈ [ 0.0 , 0.5 ) \nu \in [0.0,0.5) ν∈[0.0,0.5)
Note :
- 辅助项具有负泊松比;
- 泊松比为 0 时,拉长物体时,截面积不会发生变化;
- 泊松比较大时,物体会尽量保持体积不变,例如在拉长物体时,物体会变细。
拉梅常数(Lamé parameters) :
- Lamé 第一参数:
λ
\lambda
λ
表示材料的压缩性,等价与体弹性模量或者杨氏模量
- Lamé 第二参数:
μ
\mu
μ
表示材料的剪切模量,用 G 表示
换算公式 :
-
K
=
E
3
(
1
−
2
ν
)
K = \cfrac{E}{3(1 - 2\nu)}
K=3(1−2ν)E (常用于可压缩液体)
-
λ
=
E
ν
(
1
+
ν
)
(
1
−
2
ν
)
\lambda = \cfrac{E\nu}{(1 + \nu)(1 - 2\nu)}
λ=(1+ν)(1−2ν)Eν
- μ = E 2 ( 1 + ν ) \mu = \cfrac{E}{2(1 + \nu)} μ=2(1+ν)E
广义胡克定律 :均匀和各向同性的材料
σ = 2 μ ϵ + λ t r ( ϵ ) \sigma = 2 \mu \epsilon + \lambda tr(\epsilon) σ=2μϵ+λtr(ϵ)
3. 常见的超弹性模型
- 经典的 MPM 方法将每个粒子看做材料的一个微元,材料的本构模型会有一个能量密度函数 Ψ \Psi Ψ ;
- 对能量密度函数 Ψ \Psi Ψ 关于整个模型求积分,得到整个材料的势能;
- 势能对材料点的形变梯度进行求导: P ( F ) = ∂ Ψ ∂ F P(\bold{F}) = \cfrac{\partial \Psi}{\partial \bold{F}} P(F)=∂F∂Ψ ;
- 物理意义上来说,势能对位置求导的结果就是力, P ( F ) P(\bold{F}) P(F) 可以看做材料点的受力。
3.1 Neo-Hookean 模型
适用于各向同性材料
-
Ψ
(
F
)
=
μ
2
∑
i
[
(
F
T
F
)
i
i
−
1
]
−
μ
log
(
J
)
+
λ
2
log
2
(
J
)
\Psi(\bold{F}) = \cfrac{\mu}{2} \sum_i [(\bold{F}^T\bold{F})_{ii} - 1] - \mu \log(J) + \cfrac{\lambda}{2} \log^2(J)
Ψ(F)=2μ∑i[(FTF)ii−1]−μlog(J)+2λlog2(J)
- P ( F ) = ∂ Ψ ∂ F = μ ( F − F T ) + λ log ( J ) F − T P(\bold{F}) = \cfrac{\partial \Psi}{\partial \bold{F}} = \mu(\bold{F} - \bold{F}^T) + \lambda\log(J)\bold{F}^{-T} P(F)=∂F∂Ψ=μ(F−FT)+λlog(J)F−T
因为 Neo-Hookean 模型容易造成能量流失,这时可以考虑 Corotated 模型。
FEM 中应用 Neo-Hookean 模型的示例代码 :
dim = 2
E, nu = 1000, 0.3
la = E * nu / ((1 + nu) * (1 - 2 * nu))
mu = E / (2 * (1 + nu))
element_V = 0.01
pars = ti.Vector(dim, dt=real, shape=n_nodes, needs_grad=True)
vels = ti.Vector(dim, dt=real, shape=n_nodes)
total_energy = ti.var(dt=real, shape=(), needs_grad=True)
# 计算势能
@ti.kernel
def compute_total_energy():
for i in range(n_elements):
# get F:见 4.2
......
# NeoHookean
I1 = (F @ F.transpose()).trace()
# 防止 J 的值过小引起错误
J = max(0.2, F.determinant())
element_energy_density = 0.5 * mu * (I1 - dim) - mu * ti.log(J) + 0.5 * la * ti.log(J)**2
total_energy[None] += element_energy_density * element_V
# 渲染循环
while True:
for s in range(30):
# 调用 taichi 的自动微分器
# 定义的损失函数:compute_total_energy()
# 函数值:total_energy
# 变量值:x
# 微分结果(i 点上的力) :x.grad[i]
# f = - \partial (total_energy) / \partial x
with ti.Tape(total_energy):
compute_total_energy()
......
Note :
- 在 FEM 中的势能(后续有详细说明):
U ( e ) = ∫ e Ψ ( F ( x ) ) d x = V e Ψ ( F e ) U(e) = \int_e\bold{\Psi(F(x))\mathrm{d}x} = V_e\bold{\Psi(F_e)} U(e)=∫eΨ(F(x))dx=VeΨ(Fe)
3.2 (Fixed)Corotated 模型
-
Ψ
(
F
)
=
μ
∑
i
(
σ
i
−
1
)
2
+
λ
2
(
J
−
1
)
2
\Psi(\bold{F}) = \mu \sum_i(\sigma_i - 1)^2 + \cfrac{\lambda}{2}(J - 1)^2
Ψ(F)=μ∑i(σi−1)2+2λ(J−1)2
- P ( F ) = ∂ Ψ ∂ F = 2 μ ( F − R ) + λ ( J − 1 ) J F − T P(\bold{F}) = \cfrac{\partial \Psi}{\partial \bold{F}} = 2\mu(\bold{F} - \bold{R}) + \lambda(J - 1)J\bold{F}^{-T} P(F)=∂F∂Ψ=2μ(F−R)+λ(J−1)JF−T
Note :
- σ i \sigma_i σi 是 F \bold{F} F 的奇异值。
3.3 MPM 教程
《The Material Point Method for Simulating Continuum Materials》
4. 有限元基础
有限元法 :建立离散模型的 Galerkin 离散格式。
4.1 微元构建
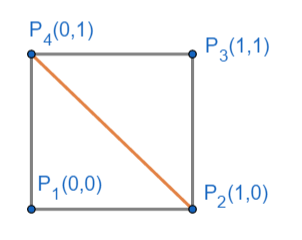
4.1.1 三角形微元
n_nodes_x
n_nodes_y
n_nodes = n_nodes_x * n_nodes_y
n_elements = (n_nodes_x - 1) * (n_nodes_y - 1) * 2
pars = ti.Vector(dim, dt=ti.f32, shape=n_nodes, needs_grad=True)
vels = ti.Vector(dim, dt=ti.f32, shape=n_nodes)
elements = ti.var(dt=ti.i32, shape=(n_elements, dim + 1))
# 微元体积
dx = 1 / 16
# 生成基准点的坐标
init_pos = [0.1, 0.7])
def genMesh():
offset_x = 0.1
get_pid = lambda i, j: i * n_nodes_y + j
for i in range(n_nodes_x):
for j in range(n_nodes_y):
# particle id
pid = get_pid(i, j)
pars[pid] = [init_pos[0] + i * dx * 0.5,
init_pos[1] + j * dx * 0.5 + i * dx * offset_x]
vels[pid] = [0, -1]
# build vertices
for i in range(n_nodes_x - 1):
for j in range(n_nodes_y - 1):
# element id
eid = (i * (n_nodes_y - 1) + j) * 2
elements[eid, 0] = get_pid(i, j)
elements[eid, 1] = get_pid(i + 1, j)
elements[eid, 2] = get_pid(i, j + 1)
eid = (i * (n_nodes_y - 1) + j) * 2 + 1
elements[eid, 0] = get_pid(i + 1, j + 1)
elements[eid, 1] = get_pid(i, j + 1)
elements[eid, 2] = get_pid(i + 1, j)
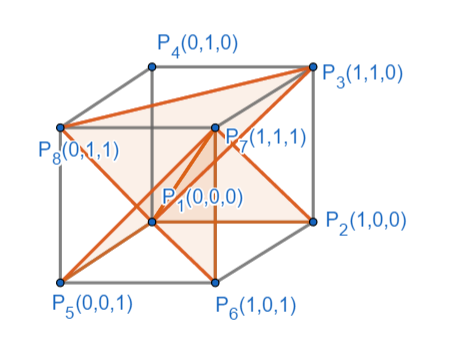
4.1.2 四面体微元
TetGen_Cube.node
......
8 3 0 0
1 0 0 0
2 1 0 0
3 1 1 0
4 0 1 0
5 0 0 1
6 1 0 1
7 1 1 1
8 0 1 1
TetGen_Cube.ele
......
6 4 0
1 6 7 1 5
2 1 8 3 4
3 3 7 1 2
4 1 7 6 2
5 1 7 3 8
6 7 8 1 5
代码示例 :
n_nodes_x
n_nodes_y
n_nodes_z
n_nodes = n_nodes_x * n_nodes_y * n_nodes_z
n_elements = (n_nodes_x - 1) * (n_nodes_y - 1) * (n_nodes_z - 1) * 6
pars = ti.Vector(dim, dt=ti.f32, shape=n_nodes, needs_grad=True)
vels = ti.Vector(dim, dt=ti.f32, shape=n_nodes)
elements = ti.var(dt=ti.i32, shape=(n_elements, dim + 1))
# 微元体积
dx = 1 / 16
# 生成基准点的坐标
init_pos = [0.0, 0.7, 0.0]
def genMeshP():
get_pid = lambda i, j, k: i * n_nodes_y * n_nodes_z + j * n_nodes_z + k
for i in range(n_nodes_x):
for j in range(n_nodes_y):
for k in range(n_nodes_z):
# particle id
pid = get_pid(i, j, k)
pars[pid] = [init_pos[0] + i * dx * 0.5,
init_pos[1] + j * dx * 0.5,
init_pos[2] + k * dx * 0.5]
vels[pid] = [0, -1, 0]
# build vertices
for i in range(n_nodes_x - 1):
for j in range(n_nodes_y - 1):
for k in range(n_nodes_z - 1):
# particle id
# 1 (i, j, k)
# 2 (i + 1, j, k)
# 3 (i + 1, j + 1, k)
# 4 (i, j + 1, k)
# 5 (i, j, k + 1)
# 6 (i + 1, j, k + 1)
# 7 (i + 1, j + 1, k + 1)
# 8 (i, j + 1, k + 1)
# element id
# 0 {6, 7, 1, 5}
eid = ((i * (n_nodes_y - 1) + j) * (n_nodes_z - 1) + k) * 6
elements[eid, 0] = get_pid(i + 1, j, k + 1)
elements[eid, 1] = get_pid(i + 1, j + 1, k + 1)
elements[eid, 2] = get_pid(i, j, k)
elements[eid, 3] = get_pid(i, j, k + 1)
# 1 {1, 8, 3, 4}
eid = ((i * (n_nodes_y - 1) + j) * (n_nodes_z - 1) + k) * 6 + 1
elements[eid, 0] = get_pid(i, j, k)
elements[eid, 1] = get_pid(i, j + 1, k + 1)
elements[eid, 2] = get_pid(i + 1, j + 1, k)
elements[eid, 3] = get_pid(i, j + 1, k)
# 2 {3, 7, 1, 2}
eid = ((i * (n_nodes_y - 1) + j) * (n_nodes_z - 1) + k) * 6 + 2
elements[eid, 0] = get_pid(i + 1, j + 1, k)
elements[eid, 1] = get_pid(i + 1, j + 1, k + 1)
elements[eid, 2] = get_pid(i, j, k)
elements[eid, 3] = get_pid(i + 1, j, k)
# 3 {1, 7, 6, 2}
eid = ((i * (n_nodes_y - 1) + j) * (n_nodes_z - 1) + k) * 6 + 3
elements[eid, 0] = get_pid(i, j, k)
elements[eid, 1] = get_pid(i + 1, j + 1, k + 1)
elements[eid, 2] = get_pid(i + 1, j, k + 1)
elements[eid, 3] = get_pid(i + 1, j, k)
# 4 {1, 7, 3, 8}
eid = ((i * (n_nodes_y - 1) + j) * (n_nodes_z - 1) + k) * 6 + 4
elements[eid, 0] = get_pid(i, j, k)
elements[eid, 1] = get_pid(i + 1, j + 1, k + 1)
elements[eid, 2] = get_pid(i + 1, j + 1, k)
elements[eid, 3] = get_pid(i, j + 1, k + 1)
# 5 {7, 8, 1, 5}
eid = ((i * (n_nodes_y - 1) + j) * (n_nodes_z - 1) + k) * 6 + 5
elements[eid, 0] = get_pid(i + 1, j + 1, k + 1)
elements[eid, 1] = get_pid(i, j + 1, k + 1)
elements[eid, 2] = get_pid(i, j, k)
elements[eid, 3] = get_pid(i, j, k + 1)
4.2 线性四面体(三角形)有限元法
线性四面体有限元(用于弹性)假设 形变映射 p h i phi phi 是一个仿射变换,因此 形变梯度 F \bold{F} F 在单个四面体单元内是恒定的,对单个元素来说:
x d e f o r m e d = F x r e s t + p \bold{x_{deformed}} = \bold{Fx_{rest}} + \bold{p} xdeformed=Fxrest+p
对于每个元素 e e e ,对能量密度函数求体积的积分,可以计算其弹性势能:
U ( e ) = ∫ e Ψ ( F ( x ) ) d x = V e Ψ ( F e ) U(e) = \int_e\bold{\Psi(F(x))\mathrm{d}x} = V_e\bold{\Psi(F_e)} U(e)=∫eΨ(F(x))dx=VeΨ(Fe)
- 其中 形变梯度 F \bold{F} F 在元素 e e e 上是个常数 F e \bold{F_e} Fe ,即 Ψ ( F e ) \bold{\Psi(F_e)} Ψ(Fe) 也为常数,因此可以直接得到积分结果。
4.3 计算形变梯度
x d e f o r m e d = F x r e s t + p \bold{x_{deformed}} = \bold{Fx_{rest}} + \bold{p} xdeformed=Fxrest+p
在 2D 三角形元素(三维空间中是四面体元素)中,设:
- 静止时的顶点位置: a r e s t \bold{a_{rest}} arest , b r e s t \bold{b_{rest}} brest , c r e s t \bold{c_{rest}} crest ;
- 变形后的顶点位置: a d e f o r m e d \bold{a_{deformed}} adeformed , b d e f o r m e d \bold{b_{deformed}} bdeformed , c d e f o r m e d \bold{c_{deformed}} cdeformed 。
因为在线性三角形元素中 F \bold{F} F 是常数,则有:
a d e f o r m e d = F a r e s t + p b d e f o r m e d = F b r e s t + p c d e f o r m e d = F c r e s t + p \begin{aligned} \bold{a_{deformed}} &= \bold{Fa_{rest}} + \bold{p} \\ \bold{b_{deformed}} &= \bold{Fb_{rest}} + \bold{p} \\ \bold{c_{deformed}} &= \bold{Fc_{rest}} + \bold{p} \end{aligned} adeformedbdeformedcdeformed=Farest+p=Fbrest+p=Fcrest+p
消除 p \bold{p} p :
( a d e f o r m e d − c d e f o r m e d ) = F ( a r e s t − c r e s t ) ( b d e f o r m e d − c d e f o r m e d ) = F ( b r e s t − c r e s t ) \begin{aligned} (\bold{a_{deformed}} - \bold{c_{deformed}}) &= \bold{F}(\bold{a_{rest}} - \bold{c_{rest}}) \\ (\bold{b_{deformed}} - \bold{c_{deformed}}) &= \bold{F}(\bold{b_{rest}} - \bold{c_{rest}}) \end{aligned} (adeformed−cdeformed)(bdeformed−cdeformed)=F(arest−crest)=F(brest−crest)
现在 F 2 × 2 \bold{F}_{2\times 2} F2×2 有四个线性约束:
{ B = [ b r e s t − a r e s t ∣ c r e s t − a r e s t ] − 1 D = [ b d e f o r m e d − a d e f o r m e d ∣ c d e f o r m e d − a d e f o r m e d ] F = D B = [ a b ⃗ d e f o r m e d ∣ a c ⃗ d e f o r m e d ] [ a b ⃗ r e s t ∣ a c ⃗ r e s t ] − 1 \begin{cases} \bold{B} &= [\bold{b_{rest}} - \bold{a_{rest}} | \bold{c_{rest}} - \bold{a_{rest}}]^{-1} \\ \bold{D} &= [\bold{b_{deformed}} - \bold{a_{deformed}} | \bold{c_{deformed}} - \bold{a_{deformed}}] \\ \bold{F} &= \bold{D}\bold{B} = [\vec{ab}_{\bold{deformed}} | \vec{ac}_{\bold{deformed}}] [\vec{ab}_{\bold{rest}} | \vec{ac}_{\bold{rest}}]^{-1} \end{cases} ⎩ ⎨ ⎧BDF=[brest−arest∣crest−arest]−1=[bdeformed−adeformed∣cdeformed−adeformed]=DB=[abdeformed∣acdeformed][abrest∣acrest]−1
B = ti.Matrix(dim, dim, dt=real, shape=n_elements)
elements = ti.var(dt=ti.i32, shape=(n_elements, 3))
@ti.func
def compute_D(i):
a = elements[i, 0]
b = elements[i, 1]
c = elements[i, 2]
return ti.Matrix.cols([pars[b] - pars[a], pars[c] - pars[a]])
@ti.kernel
def compute_B():
for i in range(n_elements):
B[i] = compute_D(i).inverse()
@ti.kernel
def compute_total_energy():
for i in range(n_elements):
D = compute_D(i)
F = D @ B[i]
# Neo Hookean :见 3.1
......
同理,对于三维,有:
{ B = [ b r e s t − a r e s t ∣ c r e s t − a r e s t ∣ d r e s t − a r e s t ] − 1 D = [ b d e f o r m e d − a d e f o r m e d ∣ c d e f o r m e d − a d e f o r m e d ∣ d d e f o r m e d − a d e f o r m e d ] F = D B = [ a b ⃗ d e f o r m e d ∣ a c ⃗ d e f o r m e d ∣ a d ⃗ d e f o r m e d ] [ a b ⃗ r e s t ∣ a c ⃗ r e s t ∣ a d ⃗ r e s t ] − 1 \begin{cases} \bold{B} &= [\bold{b_{rest}} - \bold{a_{rest}} | \bold{c_{rest}} - \bold{a_{rest}} | \bold{d_{rest}} - \bold{a_{rest}}]^{-1} \\ \bold{D} &= [\bold{b_{deformed}} - \bold{a_{deformed}} | \bold{c_{deformed}} - \bold{a_{deformed}} | \bold{d_{deformed}} - \bold{a_{deformed}}] \\ \bold{F} &= \bold{D}\bold{B} = [\vec{ab}_{\bold{deformed}} | \vec{ac}_{\bold{deformed}} | \vec{ad}_{\bold{deformed}}] [\vec{ab}_{\bold{rest}} | \vec{ac}_{\bold{rest}} | \vec{ad}_{\bold{rest}}]^{-1} \end{cases} ⎩ ⎨ ⎧BDF=[brest−arest∣crest−arest∣drest−arest]−1=[bdeformed−adeformed∣cdeformed−adeformed∣ddeformed−adeformed]=DB=[abdeformed∣acdeformed∣addeformed][abrest∣acrest∣adrest]−1
@ti.func
def compute_D(i):
a = elements[i, 0]
b = elements[i, 1]
c = elements[i, 2]
d = elements[i, 3]
return ti.Matrix.cols([pars[b] - pars[a], pars[c] - pars[a], pars[d] - pars[a]])
@ti.kernel
def compute_B():
for i in range(n_elements):
B[i] = compute_D(i).inverse()
@ti.kernel
def compute_total_energy():
for i in range(n_elements):
D = compute_D(i)
F = D @ B[i]
# Neo Hookean :见 3.1
......
Note :
- 其中 B \bold{B} B 在整个物理过程中是常数。因此可进行预计算;
- 对于二维微元(三角形),用两条向量 a b ⃗ \vec{ab} ab 和 a c ⃗ \vec{ac} ac 来作为基,通过张成对应的列空间的变换,来表示形变;
- 对于三维微元(四面体),用三条向量 a b ⃗ \vec{ab} ab 、 a c ⃗ \vec{ac} ac 和 a d ⃗ \vec{ad} ad 来作为基,通过张成对应的列空间的变换,来表示形变。
4.4 显式时间积分
v t + 1 , i = v t , i + Δ t f t , i m i x t + 1 , i = x t , i + Δ t v t + 1 , i \begin{aligned} \bold{v}_{t+1,i} &= \bold{v}_{t,i} + \Delta t\cfrac{\bold{f}_{t,i}}{m_i} \\ \bold{x}_{t+1,i} &= \bold{x}_{t,i} + \Delta t\bold{v}_{t+1,i} \end{aligned} vt+1,ixt+1,i=vt,i+Δtmift,i=xt,i+Δtvt+1,i
- v t , i \bold{v}_{t,i} vt,i 和 x t , i \bold{x}_{t,i} xt,i 存储在顶点中。
弹性势能对位置求导,结果的相反值即为顶点的受力:
f t , i = − ∂ U ∂ x i = − ∑ e ∂ U ( e ) ∂ x i = − ∑ e V e ∂ Ψ ( F e ) ∂ F e ∂ F e ∂ x i = − ∑ e V e P ( F e ) ∂ F e ∂ x i \begin{aligned} \bold{f}_{t,i} &= - \cfrac{\partial U}{\partial \bold{x}_i} \\ &= -\sum_e \cfrac{\partial U(e)}{\partial \bold{x}_i} \\ &= -\sum_e V_e \cfrac{\partial\Psi(\bold{F}_e)}{\partial\bold{F}_e} \cfrac{\partial\bold{F}_e}{\partial{\bold{x}_i}} \\ & = -\sum_e V_e \bold{P}(\bold{F}_e)\cfrac{\partial\bold{F}_e}{\partial{\bold{x}_i}} \end{aligned} ft,i=−∂xi∂U=−e∑∂xi∂U(e)=−e∑Ve∂Fe∂Ψ(Fe)∂xi∂Fe=−e∑VeP(Fe)∂xi∂Fe
damping = 6
@ti.kernel
def integrate():
for p in pars:
...... # 碰撞检测
# 显式时间积分
vels[p] = (vels[p] + ((-pars.grad[p] / node_mass) + ti.Vector([0, -10])) * dt) * math.exp(- damping * dt)
pars[p] += dt * vels[p]
- 其中:
v t + 1 , i = ( v t , i + f t , i + m i g m i Δ t ) e − d a m p i n g Δ t \bold{v}_{t+1,i} = \left(\bold{v}_{t,i} + \cfrac{\bold{f}_{t,i}+m_i g}{m_i} \Delta t \right) e^{-damping \Delta t} vt+1,i=(vt,i+mift,i+migΔt)e−dampingΔt
4.5 隐式时间积分
TODO
4.6 自相交处理
4.7 运行结果

5. TetGen
5.1 下载链接
5.1.1 TetGen下载
http://wias-berlin.de/software/index.jsp?id=TetGen&lang=1
5.1.2 TetView 下载
http://wias-berlin.de/software/tetgen/tetview.html
5.2 环境配置
5.2.1 源码编译
使用 CMAKE 编译源码,获得 tetgen.exe 文件:
5.2.2 环境变量
将 tetgen.exe 文件所在目录添加到 系统变量 中的 PATH ,同时可将下载的 tetview.exe 文件也一同放入该目录下。
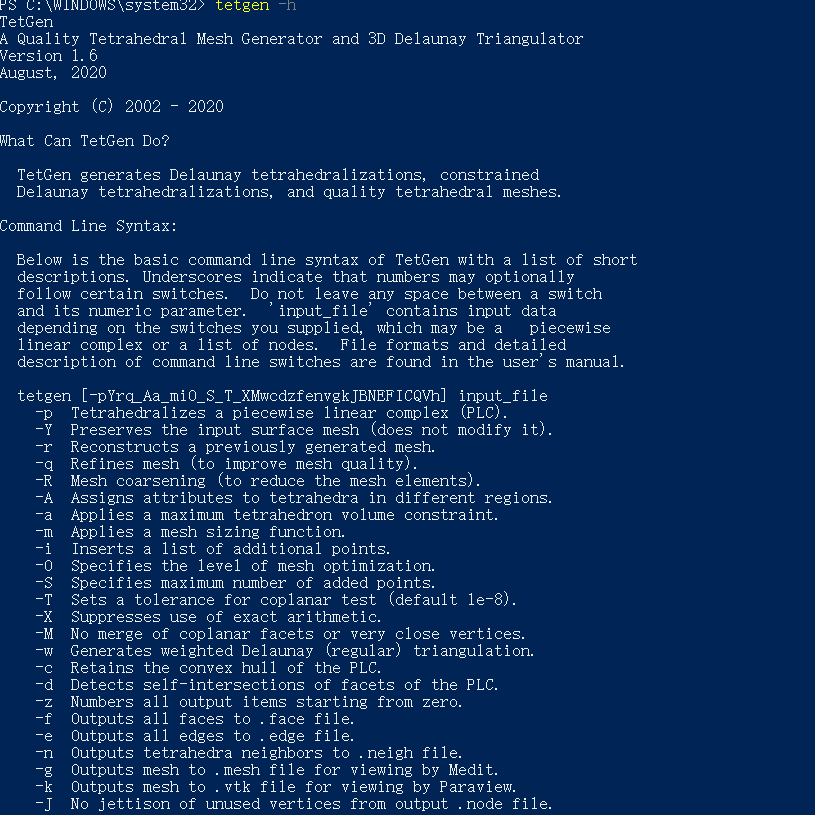
5.2.3 检测路径
用管理员模式打开 powershell ,输入以下命令:
tetgen -h
显示帮助提示,则安装成功:
5.3.1 命令
-p Tetrahedralizes a piecewise linear complex (PLC).
-Y Preserves the input surface mesh (does not modify it).
-r Reconstructs a previously generated mesh.
-q Refines mesh (to improve mesh quality).
-R Mesh coarsening (to reduce the mesh elements).
-A Assigns attributes to tetrahedra in different regions.
-a Applies a maximum tetrahedron volume constraint.
-m Applies a mesh sizing function.
-i Inserts a list of additional points.
-O Specifies the level of mesh optimization.
-S Specifies maximum number of added points.
-T Sets a tolerance for coplanar test (default 1e-8).
-X Suppresses use of exact arithmetic.
-M No merge of coplanar facets or very close vertices.
-w Generates weighted Delaunay (regular) triangulation.
-c Retains the convex hull of the PLC.
-d Detects self-intersections of facets of the PLC.
-z Numbers all output items starting from zero.
-f Outputs all faces to .face file.
-e Outputs all edges to .edge file.
-n Outputs tetrahedra neighbors to .neigh file.
-g Outputs mesh to .mesh file for viewing by Medit.
-k Outputs mesh to .vtk file for viewing by Paraview.
-J No jettison of unused vertices from output .node file.
-B Suppresses output of boundary information.
-N Suppresses output of .node file.
-E Suppresses output of .ele file.
-F Suppresses output of .face and .edge file.
-I Suppresses mesh iteration numbers.
-C Checks the consistency of the final mesh.
-Q Quiet: No terminal output except errors.
-V Verbose: Detailed information, more terminal output.
-h Help: A brief instruction for using TetGen.
5.3.2 使用步骤
- 打开
PowerShell,进入目标模型文件:
cd ......(路径)
- 使用命令调用
tetgen或者tetview:
对 example.poly 进行四面体剖分:
tetgen –p example
可视化:
tetview example.poly
tetview example.ele
5.4 文件格式
详情见《TetGen用户手册》
5.4.1 .node 文件
第一行:<点个数> <维数(3)> <属性个数> <边界标识(0或者1)>
剩下的行为点列表:
<点编号> <x> <y> <z> [属性] [边界标识]
- 一个
.node文件包括三维点列表,每个点有三维坐标(x,y,z),或者有1个或者多个属性和边界标识; .node文件可以作为输入或者输出文件以表示 PLC 点集,或者一个格网的点集,或者嵌入到格网中的附加点集(使用-i参数);- 属性为与点关联的浮点型物理量值(例如:质量、导电性等),并不加修改的复制到格网
中- 如果
-p,-q,-a或者-i是选择的,每个 Steiner 点添加到格网中默认属性值为 0 ; - 如果指明了
-w(权重 Delaunay 四面体剖分)项,第一个属性为相应点的权重; - 如果第一行的第四部分值为1,文件中最后一列为边界标识。边界标识用于识别边界点(点在PLC面上),除了
TetGen禁用了-B了开关,否则TetGen生成的.node文件包含边界标识。
- 如果
文件示例 :
# 节点格式, 3 维, 没有属性, 没有边界标识
8 3 0 0
# 节点编号, 节点坐标
1 0.0 0.0 0.0
2 1.0 0.0 0.0
3 1.0 1.0 0.0
4 0.0 1.0 0.0
5 0.0 0.0 1.0
6 1.0 0.0 1.0
7 1.0 1.0 1.0
8 0.0 1.0 1.0
python 读取示例 :
self.node_data = []
# read nodes from *.node file
with open(filename+".node", "r") as node_file:
node_line = int(node_file.readline().split()[0])
for i in range(node_line):
self.node_data += [float(x) for x in node_file.readline().split()[1:4]] #[x, y, z]
self.node_num = int(len(self.node_data)/3)
self.pars = ti.Vector(self.dim, dt=ti.f32, shape=self.node_num)
for i in range(self.node_num):
self.pars[i] = [self.node_data[3*i], self.node_data[3*i+1], self.node_data[3*i+2]]
self.vels[i] = [0, 0, 0]
包围盒:
self.center = ti.Vector(self.dim, ti.f32, shape=())
self.lowerCorner = ti.Vector(self.dim, ti.f32, shape=())
self.higherCorner = ti.Vector(self.dim, ti.f32, shape=())
for i in range(self.node_num):
self.center[None].x += self.pars[i].x
self.center[None].y += self.pars[i].y
self.center[None].z += self.pars[i].z
self.lowerCorner[None].x = min(self.lowerCorner[None].x, self.pars[i].x)
self.lowerCorner[None].y = min(self.lowerCorner[None].y, self.pars[i].y)
self.lowerCorner[None].z = min(self.lowerCorner[None].z, self.pars[i].z)
self.higherCorner[None].x = max(self.higherCorner[None].x, self.pars[i].x)
self.higherCorner[None].y = max(self.higherCorner[None].y, self.pars[i].y)
self.higherCorner[None].z = max(self.higherCorner[None].z, self.pars[i].z)
self.center[None].x /= max(self.node_num, 1)
self.center[None].y /= max(self.node_num, 1)
self.center[None].z /= max(self.node_num, 1)
| open 参数 | |
|---|---|
| “+” | 表示拥有读和写功能 |
| “r” | 表示只读 |
| “r+” | 表示可读可写,不能创建文件 |
| “w” | 表示可写 |
| “w+” | 表示可读可写,文件不存在则创建,存在则覆盖原先内容,原则就是创建一个新文件 |
| “a” | 可写 |
| “a+” | 表示可读可写,文件不存在则创建,追加内容在原本数据的末尾 |
5.4.2 .face 文件
First line: <# of faces> <boundary marker (0 or 1)>
Remaining lines list # of faces:
<face #> <node> <node> <node> ... [boundary marker] ...
- 基本的形式为每个三角面有三个角点,或者包含一个边界标识;
- 记录与
.node文件中相关联的编号。
文件示例 :
# 面个数 边界标识
12 0
# 面编号 顶点1 顶点2 顶点3
1 1 2 3
2 6 5 7
3 3 4 1
4 6 2 1
5 7 5 8
6 3 2 7
7 1 5 6
8 8 4 3
9 7 2 6
10 8 5 1
11 7 8 3
12 1 4 8
python 读取示例 :
self.face_data = []
# read faces from *.face file (only for rendering)
with open(filename+".face", "r") as face_file:
face_line = int(face_file.readline().split()[0])
for i in range(face_line):
self.face_data += [int(ind)-index_start for ind in face_file.readline().split()[1:4]] # triangle
self.face_num = int(len(self.face_data)/3)
self.faces = ti.Vector(3, dt=ti.i32, shape=self.face_num)
for i in range(self.face_num):
self.faces[i] = [self.face_data[3*i], self.face_data[3*i+1], self.face_data[3*i+2]]
5.4.3 .ele 文件
First line: <# of tetrahedra> <nodes per tet. (4 or 10)> <region attribute (0 or 1)>
Remaining lines list # of tetrahedra:
<tetrahedron #> <node> <node> ... <node> [attribute]
...
.ele文件保存了四面体列表;- 每个四面体有四个角点(如果使用了
-o2命令将有 10 个角点); - 记录了对应与
.node文件的顶点索引号,开始的四个节点为角点顶点; - 如果开启了
-o2那么余下的六个节点为四面体边界的中间点。
文件示例 :
# 元素数 每个元素的顶点数
6 4 0
# 元素编号 顶点1 顶点2 顶点3 顶点4
1 6 7 1 5
2 1 8 3 4
3 3 7 1 2
4 1 7 6 2
5 1 7 3 8
6 7 8 1 5
python 读取示例 :
self.elem_data = []
# read elements from *.ele file
with open(filename+".ele", "r") as elem_file:
elem_line = int(elem_file.readline().split()[0])
for i in range(elem_line):
self.elem_data += [ int(ind)-index_start for ind in elem_file.readline().split()[1:5] ] # tetrahedron
self.elem_num = int(len(self.elems)/4)
self.elements = ti.Vector(4, dt=ti.i32, shape=self.elem_num)
for i in range(self.elem_num):
self.elements[i] = [self.elem_data[4*i], self.elem_data[4*i+1], self.elem_data[4*i+2], self.elem_data[4*i+3]]















 646
646











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









