






近年来,毫米波雷达在高级驾驶员辅助系统(ADAS)中的使用呈现了爆发式的增长。TI 的 AWR1642 和 AWR1843 在业内第一次使用 RF-CMOS 工艺,将中射频电路,VCO,ADC 和 MCU,DSP 集成在单颗芯片内。它们的出现极大降低了汽车雷达的成本和开发难度,在车厂得到了广泛的应用。
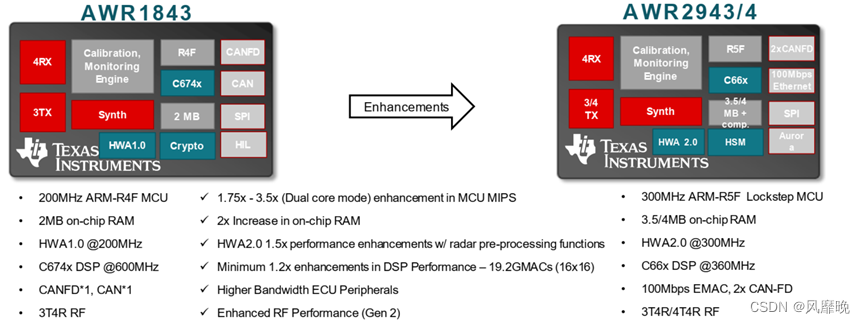
随着毫米波雷达在 ADAS领域上的应用场景不断扩展,车厂对于雷达的最远探测距离,FOV,距离/速度/角度的分辨率和精度都提出了更高的要求。AWR2944 是 TI 推出的第二代高性能毫米波雷达单芯片,和第一代芯片相比在射频性能上有50%以上的提升,同时对集成的 MCU, DSP, HWA(硬件加速器), RAM(内存)进行了全面的升级,并首次集成了 HSM(硬件安全模块)和百兆以太网,它能够大幅度提升下一代汽车雷达的性能。
AWR2944 增强的射频性能和信号处理能力使它可以支持更复杂的 DDMA(多普勒分集发射)波形,通过DDMA的多天线同时发射,结合 AWR2944上新的相关检测信号链,能够比常用的 TDMA(时间分集发射)波形获得更高的 SNR(信噪比)和更远的探测距离,从而全面提升雷达的性能。
1. AWR2943/2944 介绍:
TI 基于 RF-CMOS 工艺将毫米波雷达的中射频电路,VCO,ADC 和 MCU,DSP 集成在单颗芯片内,极大降低了汽车雷达的成本和开发难度,在车厂得到了广泛的应用。AWR2943 和 AWR2944 是 TI 在 2021 年推出的第二代高性能毫米波雷达单芯片,和第一代的 AWR1843 相比,它的性能增强如下图所示:
2. MIMO雷达发射波形
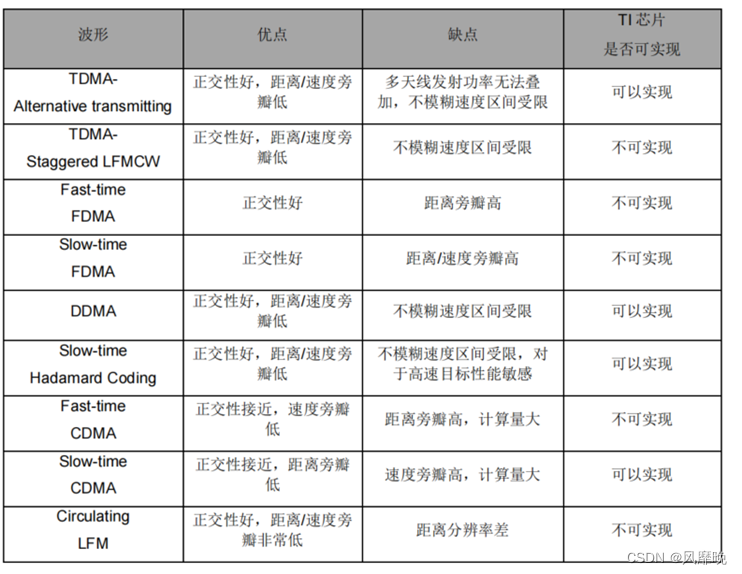
由于雷达的角度分辨率和阵元数直接相关,阵元数越多,雷达可实现的角度分辨率就越高。受制于系统成本,毫米波雷达芯片所支持的通道数是有限的。在现代雷达中,一般通过MIMO技术来增加雷达虚拟通道,从而提高雷达的角度分辨率。通常来讲,MIMO雷达可以分为四大类:TDMA(时分多址)、FDMA(频分多址)、DDMA(多普勒维多址)、CDMA(码分多址)。TI也将各种波形优缺点总结如下:
3. DDMA原理
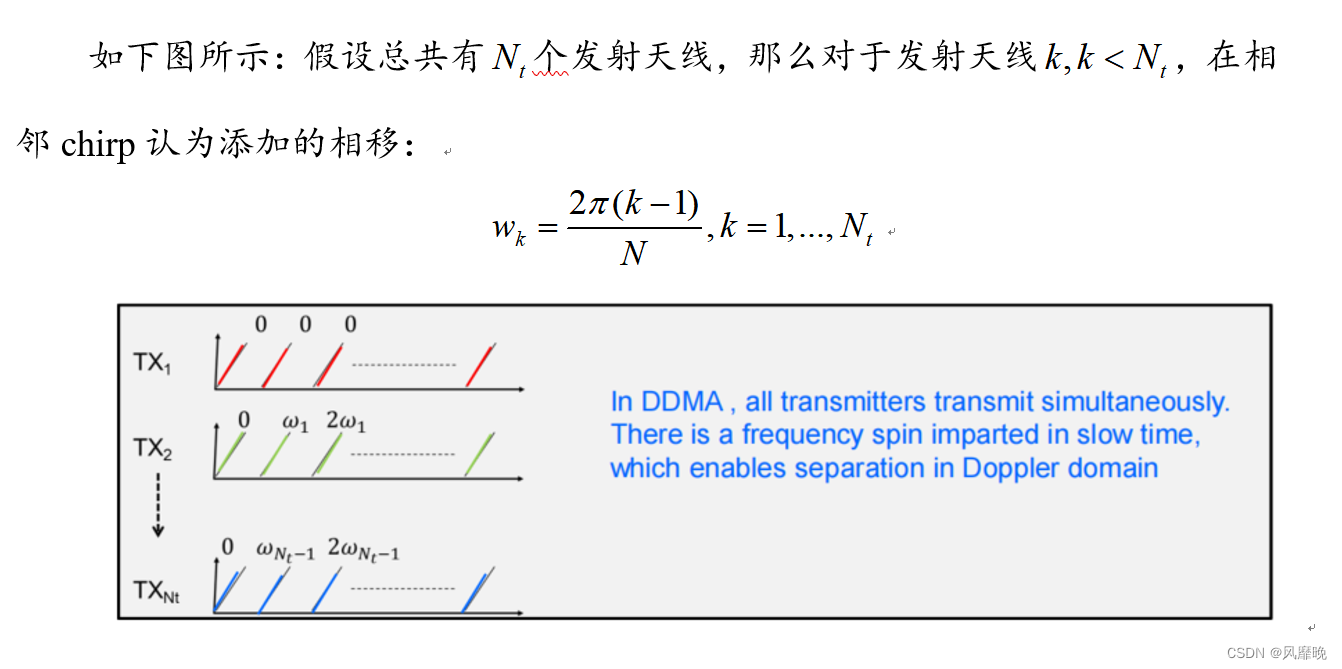
DDMA波形下所有发射天线同时发射,但是每一根发射天线都偏移一个特定的频率,通过这个认为设定的频率偏移,使不同发射天线的信号可以在RD-MAP上分离出来。在 DDMA 波形下,一个目标在不同发射天线的信号照射下所形成的回波中检测到的速度值是不同的,利用这种速度的不同,对一个目标我们可以把不同发射天线的信号在接收端分离出来。需要注意的是,不同发射天线上的频率偏移是通过在 chirp 之间(’slow time’)施加不同的相位旋转而实现的,而在 chirp 内(’fast time’)信号的相位是不变的。
那么同一个目标,在相邻两个发射天线所产生的回波中多普勒频偏为:
那么同一个目标,相邻两个发射天线所产生的回波中检测出的速度值相差:
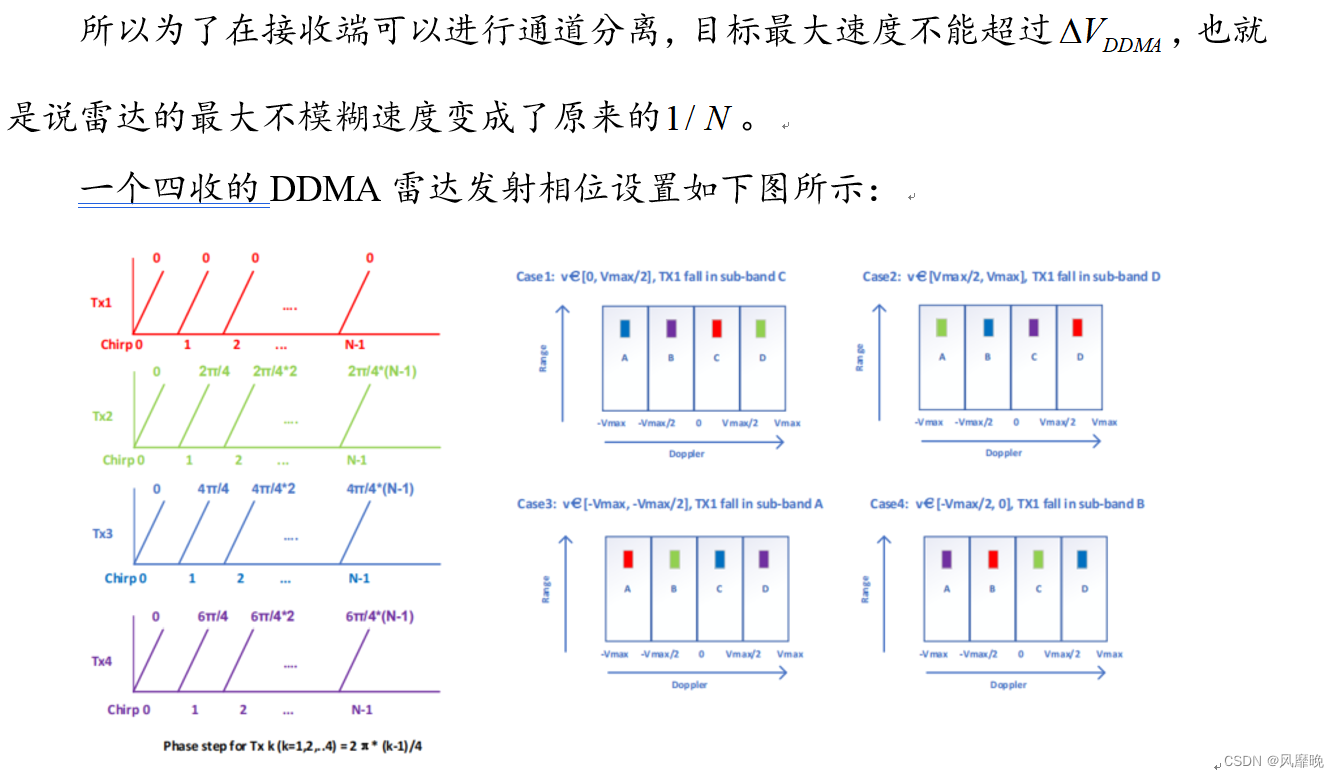
根据上图可以看出,RD-MAP上同一个目标分散在了四个多普勒区间上,我们无法正确判断出到底那个是正确的。所以我们需要进行合适的速度解模糊算法。
4. 基于 Empty-band 的 DDMA
所谓Empty-band的速度解模糊的算法就是假设发射天线个数为Nt的时候,划分多普勒区间N可以比发射天线个数多一两个,但一般要保证每个子区间分配到的chirp数量是整数。通常对于三发和四发的DDMA:
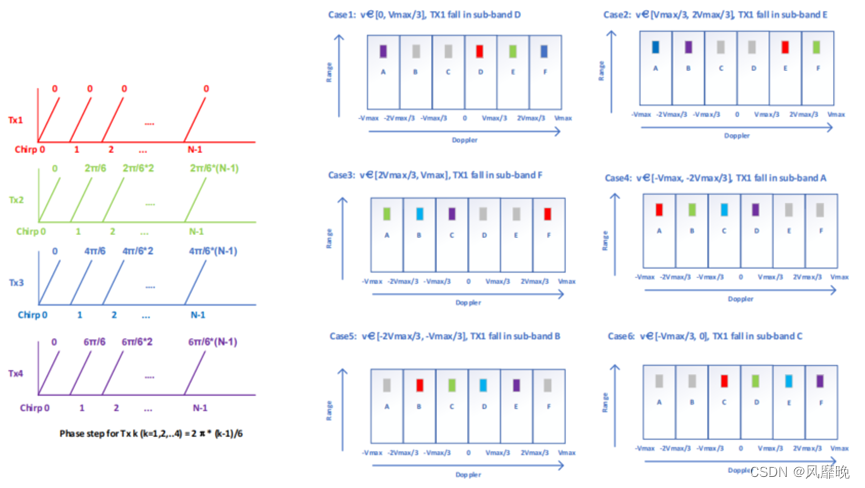
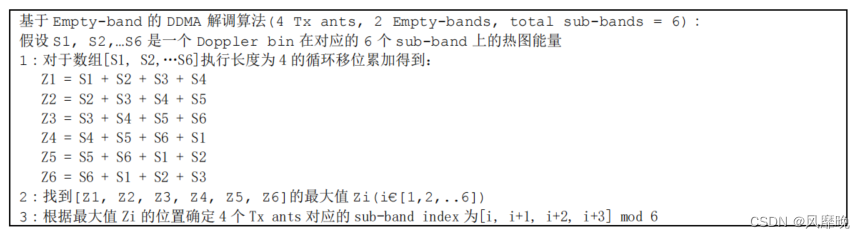
从上图中可以看出目标实际速度在整个不模糊速度区间总共由六种可能(既TX1落入A/B/C/D/E/F中哪一个sub-band),所以只要我们把没有目标出现的sub-band编号得到(灰色sub-band),我们就可以推断出那个case是正确的。容易想到的是,因为灰色框所对应的两个 sub-band 没有目标信号落入,它在 RD-MAP 上的能量必定低于其余四个有目标信号落入的 sub-band 的能量。因此只要求出 RD-MAP上六种可能的相邻两个 sub-band 的能量和,即 B+C, C+D, D+E, E+F, F+A, A+B,然后选出其中的最小值,也就能判断出其中哪两个 sub-band 没有信号落入。这就是基于 Empty-band DDMA 的解调原理。
基于Empty-band的DDMA解调算法步骤如下:
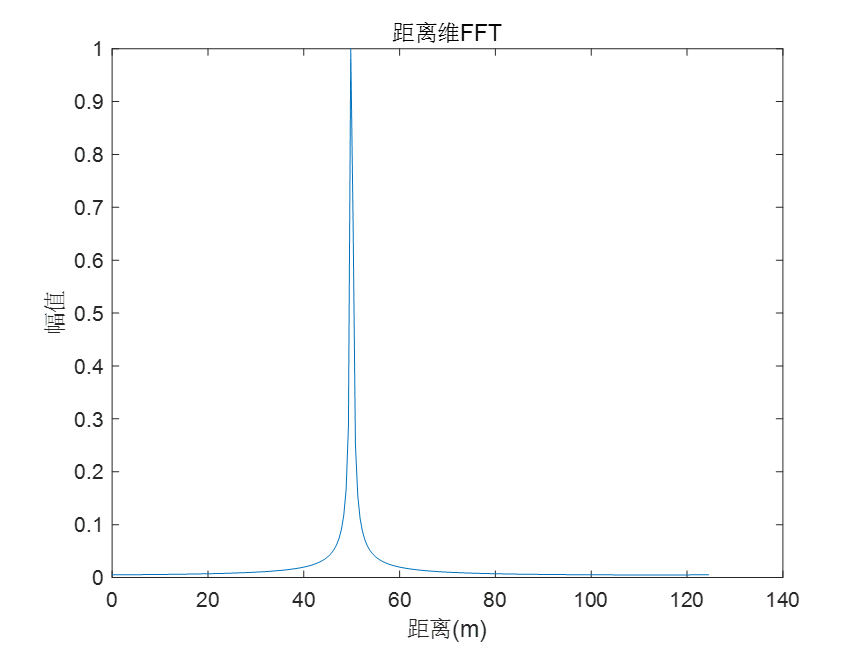
下面使用matlab简单仿真一下DDMA波形:
DDMA信号参数:载频77GHZ,chirp斜率30e12,信号带宽300MHZ,和AWR2944一样的四发四收,天线间隔为半波长。点目标距离设置为50m,最大不模糊速度为[-94m/s,+ 94m/s]
距离维度:
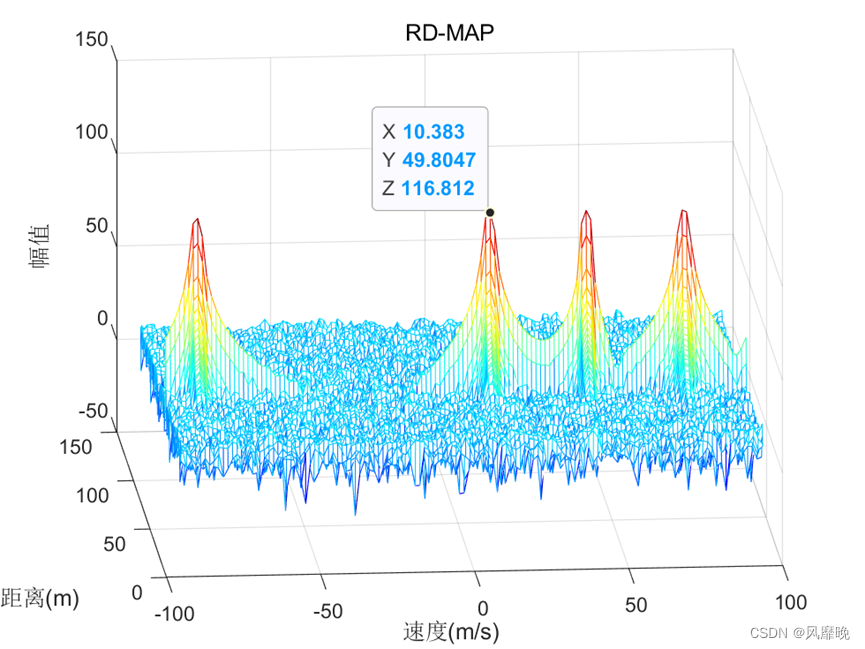
当点目标速度为10时:
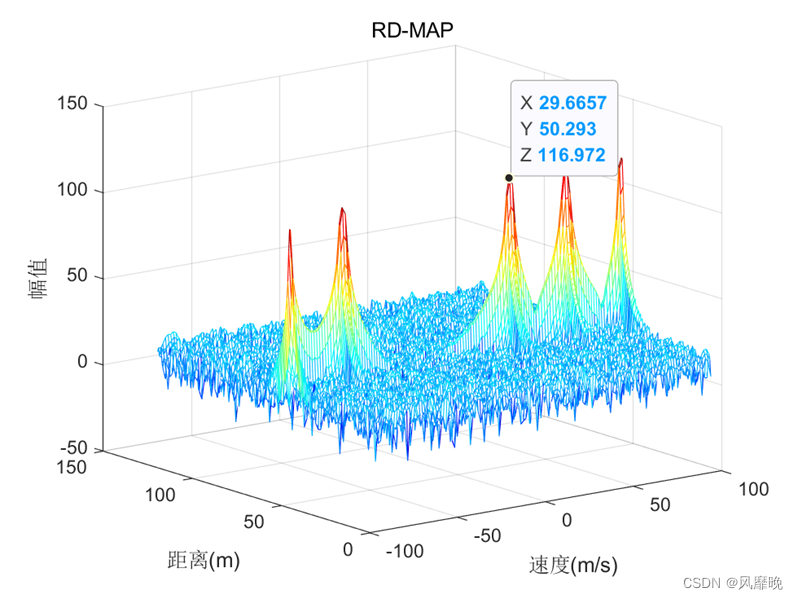
当点目标速度为30时:
目标速度为50时:
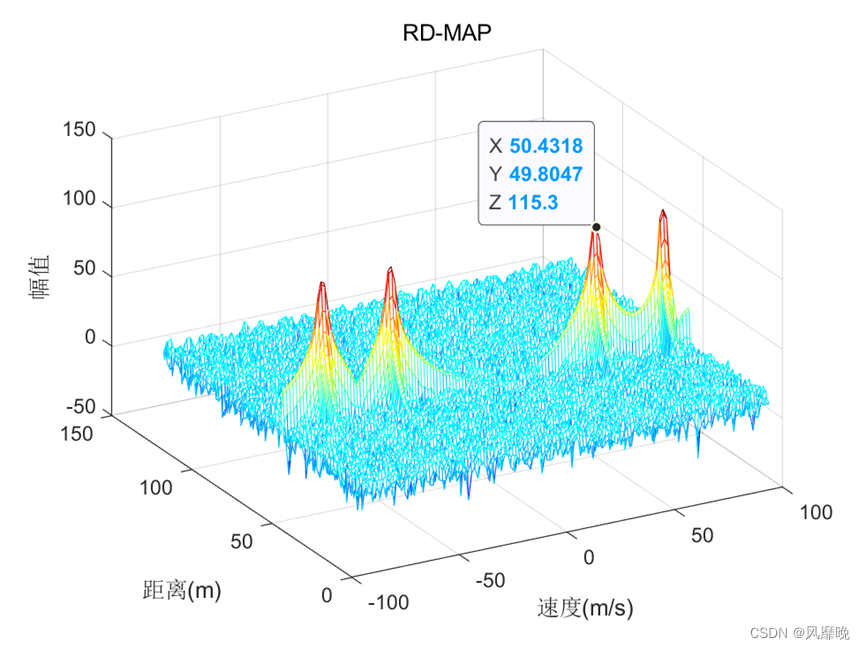
分别观察点目标速度分别为10m/s,30m/s,50m/s时的三个RD-MAP,可以发现空带后面的第一个目标即为目标真实速度索引,验证了上述算法思想的正确性。

















 3009
3009

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









