






1. 矩阵的特征值 是什么?
特征值(eigenvalue)是线性代数中的重要概念。对于一个 n×n 矩阵 A,如果存在一个非零向量 v ⃗ \vec{v} v 和一个标量 λ λ λ,使得:
A v ⃗ = λ v ⃗ A\vec{v} = λ\vec{v} Av=λv
则称 λ λ λ 是矩阵 A 的特征值,而 v ⃗ \vec{v} v 是对应于特征值 λ λ λ 的特征向量。
要求矩阵 A 的特征值,需要解特征方程:
d e t ( A − λ I ) = 0 det(A - λI) = 0 det(A−λI)=0
其中 I 是 n×n 单位矩阵,det 表示行列式。
特征值的一些重要性质:
- n×n 矩阵恰好有 n 个特征值(包括重复的)
- 矩阵的迹等于所有特征值之和
- 矩阵的行列式等于所有特征值的乘积
- 实对称矩阵的所有特征值都是实数
让我用一个简单的 2×2 矩阵举例:
A = [ 1 2 2 1 ] A = \begin{bmatrix} 1 & 2 \\ 2 & 1 \end{bmatrix} A=[1221]
特征方程为:
d
e
t
[
1
−
λ
2
2
1
−
λ
]
=
0
det\begin{bmatrix} 1-λ & 2 \\ 2 & 1-λ \end{bmatrix} = 0
det[1−λ221−λ]=0
( 1 − λ ) 2 − 4 = 0 (1-λ)^2 - 4 = 0 (1−λ)2−4=0
解得特征值: λ 1 = 3 λ_1 = 3 λ1=3, λ 2 = − 1 λ_2 = -1 λ2=−1
2. 矩阵特征值形象解释
让我尝试用更直观的方式解释矩阵的特征值是什么:
- 直观理解
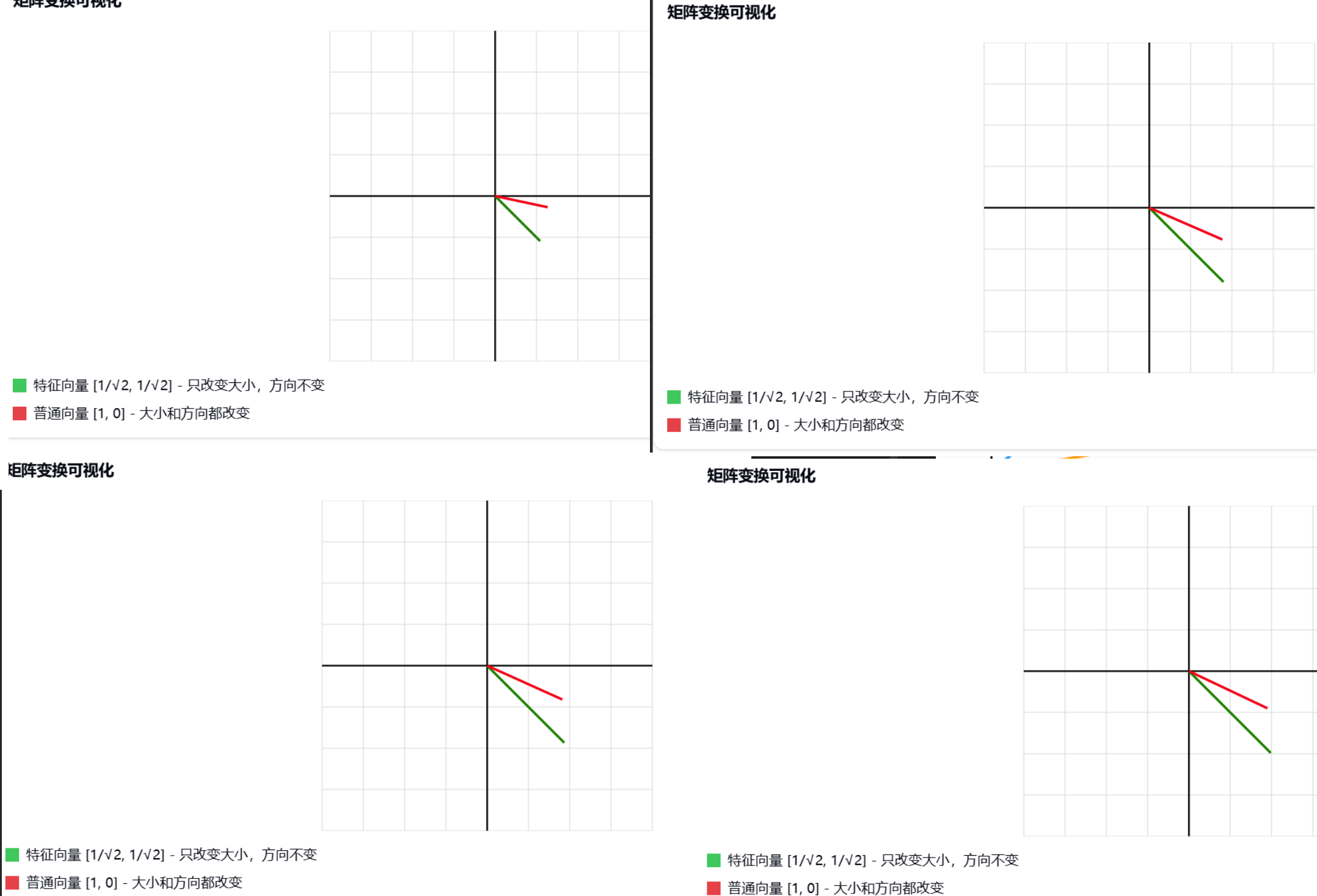
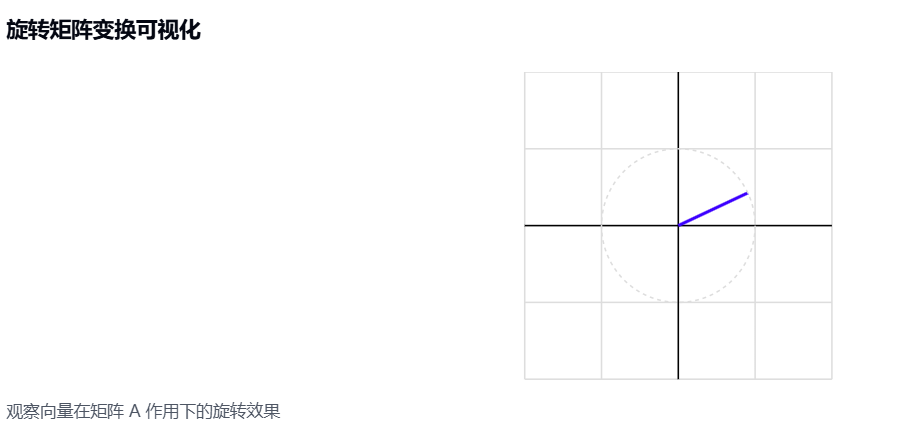
想象矩阵 A 是一个变换(比如旋转、拉伸、压缩),当这个变换作用在平面或空间中的向量上时:
- 大多数向量会改变方向和大小
- 但是有一些特殊的向量,它们只改变大小,方向不变
- 这些特殊的向量就是特征向量
- 它们变化的倍数就是特征值
- 举个生活中的例子
想象你在拉一个弹簧:
- 弹簧可以在任何方向拉伸
- 但是弹簧自然会沿着某个特定方向(特征向量的方向)变形
- 你拉伸的倍数就像是特征值
- 为什么要找特征值?
- 特征值帮助我们找到矩阵变换最本质的特征
- 比如:在这个变换下,哪些方向最容易被拉伸(大的特征值)
- 哪些方向会被压缩(小的特征值)
- 这些信息在实际应用中非常重要
- 动手验证
让我们用前面那个 2×2 矩阵的例子:
A = [ 1 2 2 1 ] A = \begin{bmatrix} 1 & 2 \\ 2 & 1 \end{bmatrix} A=[1221]
它的一个特征值是 3,对应的特征向量是 [ 1 1 ] \begin{bmatrix} 1 \\ 1 \end{bmatrix} [11]
当矩阵 A 作用在这个向量上时:
[
1
2
2
1
]
[
1
1
]
=
[
3
3
]
=
3
[
1
1
]
\begin{bmatrix} 1 & 2 \\ 2 & 1 \end{bmatrix} \begin{bmatrix} 1 \\ 1 \end{bmatrix} = \begin{bmatrix} 3 \\ 3 \end{bmatrix} = 3\begin{bmatrix} 1 \\ 1 \end{bmatrix}
[1221][11]=[33]=3[11]
您看:
- 向量的方向没变(还是 [1,1] 的方向)
- 只是大小变成了原来的 3 倍
- 这个"3"就是特征值
3. 矩阵特征值的性质讲解
1. n×n 矩阵具有 n 个特征值
这是因为特征方程 d e t ( A − λ I ) = 0 det(A - λI) = 0 det(A−λI)=0 是一个 n 次多项式方程。根据代数基本定理,n 次多项式恰好有 n 个复根(包括重复根)。例如:
- 2×2 矩阵有 2 个特征值
- 3×3 矩阵有 3 个特征值
2. 矩阵的迹与特征值之和
对于矩阵 A,如果其特征值为 λ 1 , λ 2 , . . . , λ n λ_1, λ_2, ..., λ_n λ1,λ2,...,λn,则:
t r ( A ) = λ 1 + λ 2 + . . . + λ n tr(A) = λ_1 + λ_2 + ... + λ_n tr(A)=λ1+λ2+...+λn
这里 t r ( A ) tr(A) tr(A) 表示矩阵的迹,即主对角线元素之和。
3. 矩阵的行列式与特征值之积
矩阵 A 的行列式等于其所有特征值的乘积:
d e t ( A ) = λ 1 × λ 2 × . . . × λ n det(A) = λ_1 × λ_2 × ... × λ_n det(A)=λ1×λ2×...×λn
这个性质解释了为什么矩阵不可逆(奇异)等价于至少有一个特征值为 0。
4. 实对称矩阵的特征值
如果 A 是实对称矩阵(即 A = A T A = A^T A=AT 且所有元素都是实数),那么:
- 所有特征值都是实数
- 特征向量相互正交
- A 可以被正交对角化
例如,考虑实对称矩阵:
A = [ 2 1 1 2 ] A = \begin{bmatrix} 2 & 1 \\ 1 & 2 \end{bmatrix} A=[2112]
它的特征值为 λ 1 = 3 λ_1 = 3 λ1=3 和 λ 2 = 1 λ_2 = 1 λ2=1,都是实数。
4. 疑惑
4.1. A v ⃗ = λ v ⃗ A\vec{v} = λ\vec{v} Av=λv , A是个矩阵,可以让v这个向量变换嘛, 一旦变化不可能相等呀
当矩阵 A 作用在向量 v ⃗ \vec{v} v 上时,通常会改变向量的:
- 方向
- 大小
但是特征向量 v ⃗ \vec{v} v 是特殊的!当矩阵 A 作用在特征向量上时,只会改变它的大小(拉伸或压缩),而不改变其方向。这个"拉伸/压缩因子"就是特征值 λ λ λ。
让我用一个具体的例子说明:
A = [ 2 1 1 2 ] A = \begin{bmatrix} 2 & 1 \\ 1 & 2 \end{bmatrix} A=[2112]
这个矩阵的一个特征向量是 v ⃗ = [ 1 1 ] \vec{v} = \begin{bmatrix} 1 \\ 1 \end{bmatrix} v=[11],对应的特征值 λ = 3 λ = 3 λ=3
让我们验证 A v ⃗ = λ v ⃗ A\vec{v} = λ\vec{v} Av=λv:
[ 2 1 1 2 ] [ 1 1 ] = [ 3 3 ] = 3 [ 1 1 ] \begin{bmatrix} 2 & 1 \\ 1 & 2 \end{bmatrix} \begin{bmatrix} 1 \\ 1 \end{bmatrix} = \begin{bmatrix} 3 \\ 3 \end{bmatrix} = 3\begin{bmatrix} 1 \\ 1 \end{bmatrix} [2112][11]=[33]=3[11]
您看,矩阵 A 作用后:
- 向量方向没变(还是 [ 1 1 ] \begin{bmatrix} 1 \\ 1 \end{bmatrix} [11] 的方向)
- 只是大小变成了原来的 3 倍
5. 矩阵特征值 数学例题
例题:找出下面矩阵的所有特征值和对应的特征向量:
A = [ 3 1 1 3 ] A = \begin{bmatrix} 3 & 1 \\ 1 & 3 \end{bmatrix} A=[3113]
解法步骤:
-
建立特征方程 d e t ( A − λ I ) = 0 det(A - λI) = 0 det(A−λI)=0:
d e t [ 3 − λ 1 1 3 − λ ] = 0 det\begin{bmatrix} 3-λ & 1 \\ 1 & 3-λ \end{bmatrix} = 0 det[3−λ113−λ]=0
-
计算行列式:
( 3 − λ ) ( 3 − λ ) − ( 1 ) ( 1 ) = 0 (3-λ)(3-λ) - (1)(1) = 0 (3−λ)(3−λ)−(1)(1)=0
( 3 − λ ) 2 − 1 = 0 (3-λ)^2 - 1 = 0 (3−λ)2−1=0
λ 2 − 6 λ + 8 = 0 λ^2 - 6λ + 8 = 0 λ2−6λ+8=0
-
求解特征值:
使用求根公式 λ = − b ± b 2 − 4 a c 2 a λ = \frac{-b \pm \sqrt{b^2-4ac}}{2a} λ=2a−b±b2−4acλ = 6 ± 36 − 32 2 = 6 ± 4 2 = 6 ± 2 2 λ = \frac{6 \pm \sqrt{36-32}}{2} = \frac{6 \pm \sqrt{4}}{2} = \frac{6 \pm 2}{2} λ=26±36−32=26±4=26±2
得到: λ 1 = 4 λ_1 = 4 λ1=4, λ 2 = 2 λ_2 = 2 λ2=2
-
求对应的特征向量:
对每个特征值λ,解方程组 ( A − λ I ) v ⃗ = 0 ⃗ (A - λI)\vec{v} = \vec{0} (A−λI)v=0对 λ 1 = 4 λ_1 = 4 λ1=4:
[ 3 − 4 1 1 3 − 4 ] [ v 1 v 2 ] = [ 0 0 ] \begin{bmatrix} 3-4 & 1 \\ 1 & 3-4 \end{bmatrix} \begin{bmatrix} v_1 \\ v_2 \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \end{bmatrix} [3−4113−4][v1v2]=[00]{ − v 1 + v 2 = 0 v 1 − v 2 = 0 \begin{cases} -v_1 + v_2 = 0 \\ v_1 - v_2 = 0 \end{cases} {−v1+v2=0v1−v2=0
得到: v 1 = v 2 v_1 = v_2 v1=v2,取 v 1 ⃗ = [ 1 1 ] \vec{v_1} = \begin{bmatrix} 1 \\ 1 \end{bmatrix} v1=[11]
对 λ 2 = 2 λ_2 = 2 λ2=2:
[ 1 1 1 1 ] [ v 1 v 2 ] = [ 0 0 ] \begin{bmatrix} 1 & 1 \\ 1 & 1 \end{bmatrix} \begin{bmatrix} v_1 \\ v_2 \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \end{bmatrix} [1111][v1v2]=[00]得到: v 1 = − v 2 v_1 = -v_2 v1=−v2,取 v 2 ⃗ = [ 1 − 1 ] \vec{v_2} = \begin{bmatrix} 1 \\ -1 \end{bmatrix} v2=[1−1]
最终答案:
- 特征值: λ 1 = 4 λ_1 = 4 λ1=4, λ 2 = 2 λ_2 = 2 λ2=2
- 对应的特征向量: v 1 ⃗ = [ 1 1 ] \vec{v_1} = \begin{bmatrix} 1 \\ 1 \end{bmatrix} v1=[11], v 2 ⃗ = [ 1 − 1 ] \vec{v_2} = \begin{bmatrix} 1 \\ -1 \end{bmatrix} v2=[1−1]
验证:
我们可以验证
A
v
1
⃗
=
4
v
1
⃗
A\vec{v_1} = 4\vec{v_1}
Av1=4v1:
[ 3 1 1 3 ] [ 1 1 ] = [ 4 4 ] = 4 [ 1 1 ] \begin{bmatrix} 3 & 1 \\ 1 & 3 \end{bmatrix} \begin{bmatrix} 1 \\ 1 \end{bmatrix} = \begin{bmatrix} 4 \\ 4 \end{bmatrix} = 4\begin{bmatrix} 1 \\ 1 \end{bmatrix} [3113][11]=[44]=4[11]
6. 矩阵特征值数据例题2
例题:求下列矩阵的特征值和特征向量:
A = [ 2 − 1 0 − 1 2 − 1 0 − 1 2 ] A = \begin{bmatrix} 2 & -1 & 0 \\ -1 & 2 & -1 \\ 0 & -1 & 2 \end{bmatrix} A= 2−10−12−10−12
解法步骤:
-
建立特征方程 d e t ( A − λ I ) = 0 det(A - λI) = 0 det(A−λI)=0:
d e t [ 2 − λ − 1 0 − 1 2 − λ − 1 0 − 1 2 − λ ] = 0 det\begin{bmatrix} 2-λ & -1 & 0 \\ -1 & 2-λ & -1 \\ 0 & -1 & 2-λ \end{bmatrix} = 0 det 2−λ−10−12−λ−10−12−λ =0
-
计算行列式:
使用第一行展开:( 2 − λ ) d e t [ 2 − λ − 1 − 1 2 − λ ] − ( − 1 ) d e t [ − 1 − 1 0 2 − λ ] = 0 (2-λ)det\begin{bmatrix} 2-λ & -1 \\ -1 & 2-λ \end{bmatrix} - (-1)det\begin{bmatrix} -1 & -1 \\ 0 & 2-λ \end{bmatrix} = 0 (2−λ)det[2−λ−1−12−λ]−(−1)det[−10−12−λ]=0
( 2 − λ ) [ ( 2 − λ ) ( 2 − λ ) − 1 ] − ( − 1 ) [ ( − 1 ) ( 2 − λ ) − 0 ] = 0 (2-λ)[(2-λ)(2-λ)-1] - (-1)[(-1)(2-λ)-0] = 0 (2−λ)[(2−λ)(2−λ)−1]−(−1)[(−1)(2−λ)−0]=0
( 2 − λ ) [ ( 2 − λ ) 2 − 1 ] + ( 2 − λ ) = 0 (2-λ)[(2-λ)^2-1] + (2-λ) = 0 (2−λ)[(2−λ)2−1]+(2−λ)=0
( 2 − λ ) [ ( 2 − λ ) 2 − 1 + 1 ] = 0 (2-λ)[(2-λ)^2-1+1] = 0 (2−λ)[(2−λ)2−1+1]=0
( 2 − λ ) ( λ 2 − 4 λ + 4 ) = 0 (2-λ)(λ^2-4λ+4) = 0 (2−λ)(λ2−4λ+4)=0
-
求解特征值:
( 2 − λ ) ( λ − 2 ) 2 = 0 (2-λ)(λ-2)^2 = 0 (2−λ)(λ−2)2=0
得到: λ 1 = 2 λ_1 = 2 λ1=2 (重根), λ 2 = 2 λ_2 = 2 λ2=2 (重根), λ 3 = 2 λ_3 = 2 λ3=2 (重根)
-
求对应的特征向量:
对 λ = 2 λ = 2 λ=2,解方程组 ( A − 2 I ) v ⃗ = 0 ⃗ (A - 2I)\vec{v} = \vec{0} (A−2I)v=0[ 0 − 1 0 − 1 0 − 1 0 − 1 0 ] [ v 1 v 2 v 3 ] = [ 0 0 0 ] \begin{bmatrix} 0 & -1 & 0 \\ -1 & 0 & -1 \\ 0 & -1 & 0 \end{bmatrix} \begin{bmatrix} v_1 \\ v_2 \\ v_3 \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \\ 0 \end{bmatrix} 0−10−10−10−10 v1v2v3 = 000
得到方程组:
{ − v 2 = 0 − v 1 − v 3 = 0 − v 2 = 0 \begin{cases} -v_2 = 0 \\ -v_1 - v_3 = 0 \\ -v_2 = 0 \end{cases} ⎩ ⎨ ⎧−v2=0−v1−v3=0−v2=0可得: v 2 = 0 v_2 = 0 v2=0, v 1 = − v 3 v_1 = -v_3 v1=−v3
一个线性无关的特征向量为: v ⃗ = [ 1 0 − 1 ] \vec{v} = \begin{bmatrix} 1 \\ 0 \\ -1 \end{bmatrix} v= 10−1
最终答案:
- 特征值: λ = 2 λ = 2 λ=2 (三重根)
- 对应的一个特征向量: v ⃗ = [ 1 0 − 1 ] \vec{v} = \begin{bmatrix} 1 \\ 0 \\ -1 \end{bmatrix} v= 10−1
特点分析:
- 这是一个三重特征值的情况
- 虽然是三重特征值,但只有一个线性无关的特征向量
- 这种情况下,矩阵 A 不能对角化
7. 矩阵特征例题
例题:求下列矩阵的特征值和特征向量:
A = [ 0 − 2 2 0 ] A = \begin{bmatrix} 0 & -2 \\ 2 & 0 \end{bmatrix} A=[02−20]
解法步骤:
-
建立特征方程 d e t ( A − λ I ) = 0 det(A - λI) = 0 det(A−λI)=0:
d e t [ − λ − 2 2 − λ ] = 0 det\begin{bmatrix} -λ & -2 \\ 2 & -λ \end{bmatrix} = 0 det[−λ2−2−λ]=0
-
计算行列式:
( − λ ) ( − λ ) − ( − 2 ) ( 2 ) = 0 (-λ)(-λ) - (-2)(2) = 0 (−λ)(−λ)−(−2)(2)=0
λ 2 + 4 = 0 λ^2 + 4 = 0 λ2+4=0
-
求解特征值:
λ = ± 2 i λ = \pm 2i λ=±2i
得到: λ 1 = 2 i λ_1 = 2i λ1=2i, λ 2 = − 2 i λ_2 = -2i λ2=−2i
-
求对应的特征向量:
对 λ 1 = 2 i λ_1 = 2i λ1=2i,解方程组:
[ − 2 i − 2 2 − 2 i ] [ v 1 v 2 ] = [ 0 0 ] \begin{bmatrix} -2i & -2 \\ 2 & -2i \end{bmatrix} \begin{bmatrix} v_1 \\ v_2 \end{bmatrix} = \begin{bmatrix} 0 \\ 0 \end{bmatrix} [−2i2−2−2i][v1v2]=[00]得到: − 2 i v 1 − 2 v 2 = 0 -2iv_1 - 2v_2 = 0 −2iv1−2v2=0
解得: v 1 = 1 v_1 = 1 v1=1, v 2 = i v_2 = i v2=i
因此, v 1 ⃗ = [ 1 i ] \vec{v_1} = \begin{bmatrix} 1 \\ i \end{bmatrix} v1=[1i]
对 λ 2 = − 2 i λ_2 = -2i λ2=−2i,类似可得:
v 2 ⃗ = [ 1 − i ] \vec{v_2} = \begin{bmatrix} 1 \\ -i \end{bmatrix} v2=[1−i]
最终答案:
- 特征值: λ 1 = 2 i λ_1 = 2i λ1=2i, λ 2 = − 2 i λ_2 = -2i λ2=−2i
- 对应的特征向量:
- v 1 ⃗ = [ 1 i ] \vec{v_1} = \begin{bmatrix} 1 \\ i \end{bmatrix} v1=[1i]
- v 2 ⃗ = [ 1 − i ] \vec{v_2} = \begin{bmatrix} 1 \\ -i \end{bmatrix} v2=[1−i]
几何意义:
- 这个矩阵代表平面上的旋转变换
- 虚特征值表明这是一个旋转矩阵
- 旋转角度可以从特征值求出: θ = arctan ( 2 ) θ = \arctan(2) θ=arctan(2)
让我们创建一个可视化来展示这个旋转变换:
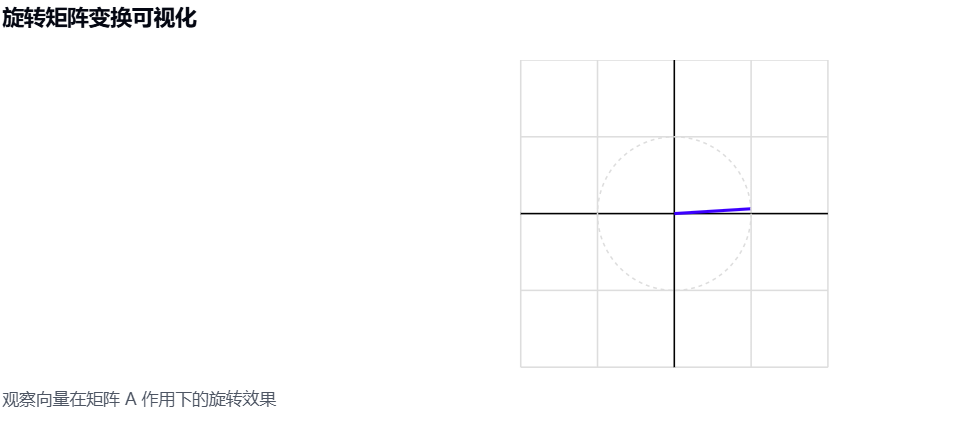
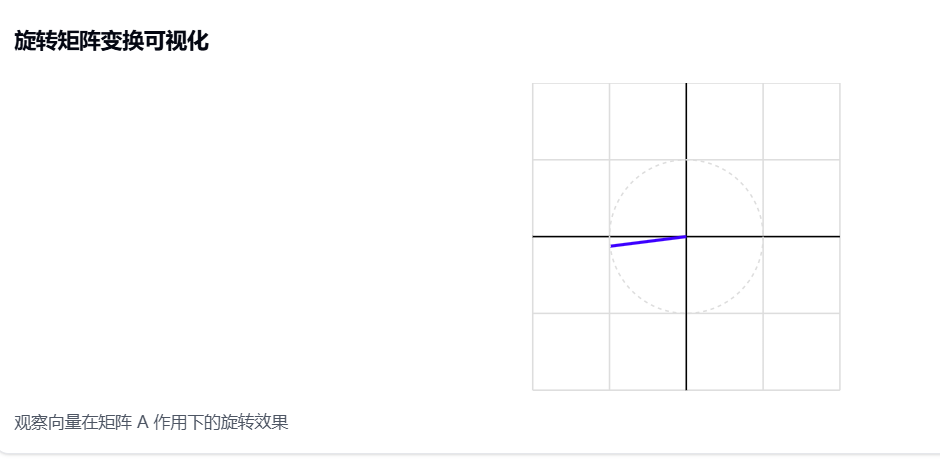
这个可视化展示了向量在该矩阵作用下的旋转效果。蓝色向量随时间旋转,展示了矩阵 A 的作用效果。


















 1294
1294

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











