






1. 向量基础
1.1 向量定义
向量与标量的区别
标量是只有大小没有方向的量,如质量、温度等;而向量是同时具有大小和方向的量,如位移、速度、力等。
数学上表示:
- 标量: a , b , c , … a, b, c, \ldots a,b,c,…(通常用小写字母表示)
- 向量: a ⃗ , b ⃗ , c ⃗ , … \vec{a}, \vec{b}, \vec{c}, \ldots a,b,c,… 或 a , b , c , … \mathbf{a}, \mathbf{b}, \mathbf{c}, \ldots a,b,c,…(通常加箭头或粗体表示)
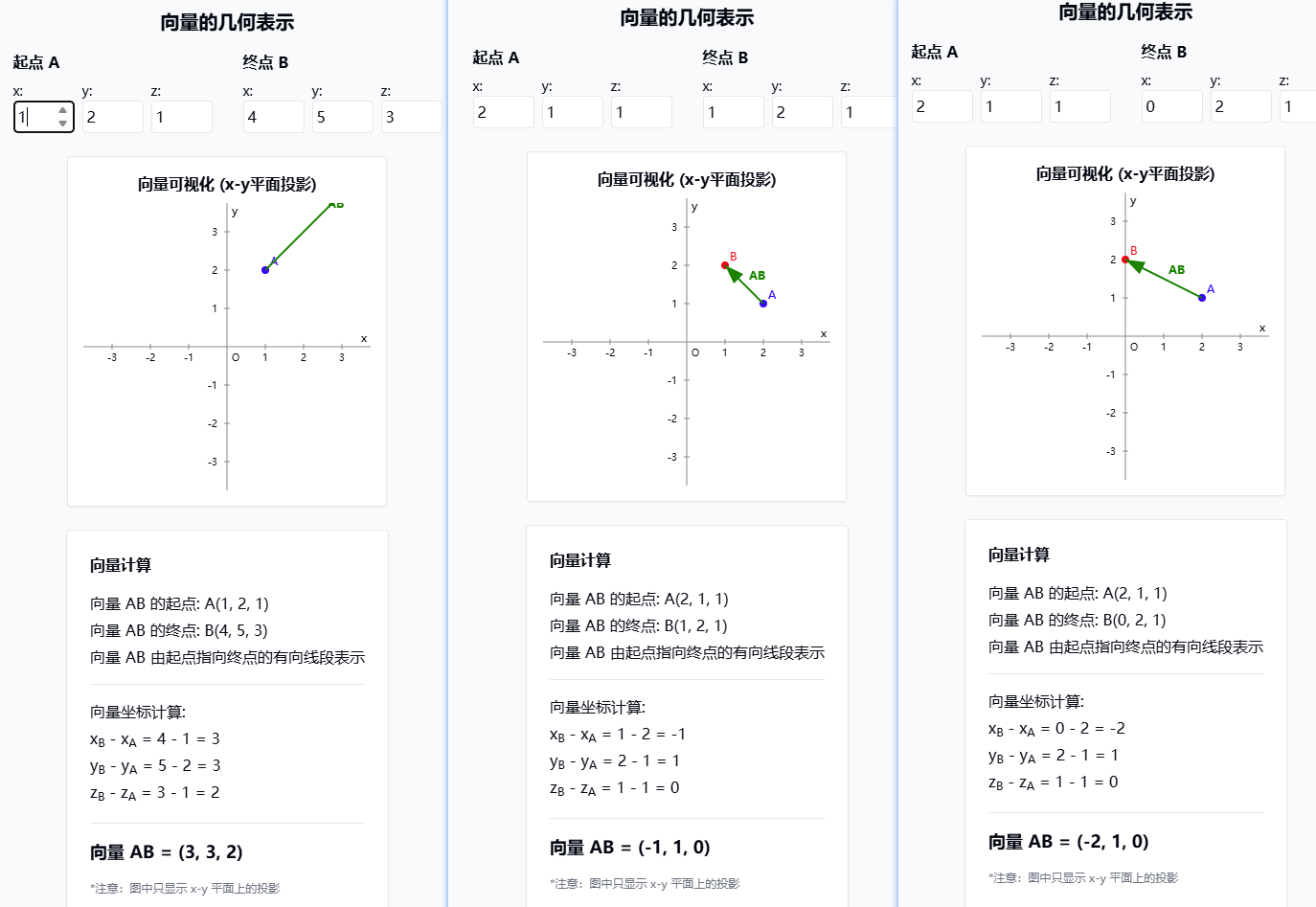
向量的几何表示(有向线段)
向量几何上表示为有向线段,其中:
- 线段的长度表示向量的大小(模)
- 线段的方向表示向量的方向
- 起点称为向量的起点,终点称为向量的终点
1.2 向量的表示
代数表示法
在 n n n维空间中,向量可以用有序数组表示: a ⃗ = ( a 1 , a 2 , … , a n ) \vec{a} = (a_1, a_2, \ldots, a_n) a=(a1,a2,…,an)
特别地,在二维和三维空间中:
- 二维向量: a ⃗ = ( a 1 , a 2 ) \vec{a} = (a_1, a_2) a=(a1,a2) 或 a ⃗ = a 1 i ⃗ + a 2 j ⃗ \vec{a} = a_1\vec{i} + a_2\vec{j} a=a1i+a2j
- 三维向量: a ⃗ = ( a 1 , a 2 , a 3 ) \vec{a} = (a_1, a_2, a_3) a=(a1,a2,a3) 或 a ⃗ = a 1 i ⃗ + a 2 j ⃗ + a 3 k ⃗ \vec{a} = a_1\vec{i} + a_2\vec{j} + a_3\vec{k} a=a1i+a2j+a3k
其中 i ⃗ , j ⃗ , k ⃗ \vec{i}, \vec{j}, \vec{k} i,j,k是单位向量,分别沿 x , y , z x, y, z x,y,z轴的正方向。
几何表示法
从几何角度,向量可以用起点和终点的坐标表示:
- 如果向量 A B ⃗ \vec{AB} AB的起点 A A A坐标为 ( x A , y A , z A ) (x_A, y_A, z_A) (xA,yA,zA),终点 B B B坐标为 ( x B , y B , z B ) (x_B, y_B, z_B) (xB,yB,zB),则: A B ⃗ = ( x B − x A , y B − y A , z B − z A ) \vec{AB} = (x_B - x_A, y_B - y_A, z_B - z_A) AB=(xB−xA,yB−yA,zB−zA)
1.3 向量的基本运算
向量加法与减法
向量加法: 若 a ⃗ = ( a 1 , a 2 , a 3 ) \vec{a} = (a_1, a_2, a_3) a=(a1,a2,a3), b ⃗ = ( b 1 , b 2 , b 3 ) \vec{b} = (b_1, b_2, b_3) b=(b1,b2,b3),则: a ⃗ + b ⃗ = ( a 1 + b 1 , a 2 + b 2 , a 3 + b 3 ) \vec{a} + \vec{b} = (a_1 + b_1, a_2 + b_2, a_3 + b_3) a+b=(a1+b1,a2+b2,a3+b3)
几何意义:平行四边形法则或三角形法则
向量减法: a ⃗ − b ⃗ = ( a 1 − b 1 , a 2 − b 2 , a 3 − b 3 ) \vec{a} - \vec{b} = (a_1 - b_1, a_2 - b_2, a_3 - b_3) a−b=(a1−b1,a2−b2,a3−b3)
几何意义: a ⃗ − b ⃗ = a ⃗ + ( − b ⃗ ) \vec{a} - \vec{b} = \vec{a} + (-\vec{b}) a−b=a+(−b)
向量与标量的乘法
若 a ⃗ = ( a 1 , a 2 , a 3 ) \vec{a} = (a_1, a_2, a_3) a=(a1,a2,a3), λ \lambda λ是标量,则: λ a ⃗ = ( λ a 1 , λ a 2 , λ a 3 ) \lambda\vec{a} = (\lambda a_1, \lambda a_2, \lambda a_3) λa=(λa1,λa2,λa3)
几何意义:
- 当 λ > 0 \lambda > 0 λ>0时, λ a ⃗ \lambda\vec{a} λa与 a ⃗ \vec{a} a方向相同,大小变为原来的 λ \lambda λ倍
- 当 λ < 0 \lambda < 0 λ<0时, λ a ⃗ \lambda\vec{a} λa与 a ⃗ \vec{a} a方向相反,大小变为原来的 ∣ λ ∣ |\lambda| ∣λ∣倍
- 当 λ = 0 \lambda = 0 λ=0时, λ a ⃗ = 0 ⃗ \lambda\vec{a} = \vec{0} λa=0(零向量)
向量的线性组合
若有向量 a ⃗ 1 , a ⃗ 2 , … , a ⃗ n \vec{a}_1, \vec{a}_2, \ldots, \vec{a}_n a1,a2,…,an和标量 λ 1 , λ 2 , … , λ n \lambda_1, \lambda_2, \ldots, \lambda_n λ1,λ2,…,λn,则: λ 1 a ⃗ 1 + λ 2 a ⃗ 2 + … + λ n a ⃗ n = ∑ i = 1 n λ i a ⃗ i \lambda_1\vec{a}_1 + \lambda_2\vec{a}_2 + \ldots + \lambda_n\vec{a}_n = \sum_{i=1}^{n} \lambda_i\vec{a}_i λ1a1+λ2a2+…+λnan=i=1∑nλiai
称为向量 a ⃗ 1 , a ⃗ 2 , … , a ⃗ n \vec{a}_1, \vec{a}_2, \ldots, \vec{a}_n a1,a2,…,an的线性组合。
特别地,对于二维或三维空间中的任意向量 a ⃗ \vec{a} a: a ⃗ = ( a 1 , a 2 ) = a 1 i ⃗ + a 2 j ⃗ \vec{a} = (a_1, a_2) = a_1\vec{i} + a_2\vec{j} a=(a1,a2)=a1i+a2j a ⃗ = ( a 1 , a 2 , a 3 ) = a 1 i ⃗ + a 2 j ⃗ + a 3 k ⃗ \vec{a} = (a_1, a_2, a_3) = a_1\vec{i} + a_2\vec{j} + a_3\vec{k} a=(a1,a2,a3)=a1i+a2j+a3k
这表明任何向量都可以表示为标准基向量的线性组合。
2. 向量的几何性质
2.1 向量的长度
向量的模(长度)
向量的模,也称为向量的长度或大小,是向量的基本几何特性。
对于任意向量 a ⃗ = ( a 1 , a 2 , a 3 ) \vec{a} = (a_1, a_2, a_3) a=(a1,a2,a3),其模长定义为:
∣ a ⃗ ∣ = a 1 2 + a 2 2 + a 3 2 |\vec{a}| = \sqrt{a_1^2 + a_2^2 + a_3^2} ∣a∣=a12+a22+a32
这实际上是应用了三维空间中的距离公式,表示从原点到点 ( a 1 , a 2 , a 3 ) (a_1, a_2, a_3) (a1,a2,a3) 的距离。
例子:计算向量 v ⃗ = ( 3 , 4 , 0 ) \vec{v} = (3, 4, 0) v=(3,4,0) 的长度。
∣ v ⃗ ∣ = 3 2 + 4 2 + 0 2 = 9 + 16 + 0 = 25 = 5 |\vec{v}| = \sqrt{3^2 + 4^2 + 0^2} = \sqrt{9 + 16 + 0} = \sqrt{25} = 5 ∣v∣=32+42+02=9+16+0=25=5
向量的单位向量
单位向量是模长为1的向量,通常用来表示方向。任何非零向量 a ⃗ \vec{a} a 都可以被归一化为单位向量,记作 a ^ \hat{a} a^,计算方法是:
a ^ = a ⃗ ∣ a ⃗ ∣ \hat{a} = \frac{\vec{a}}{|\vec{a}|} a^=∣a∣a
这个过程称为向量的归一化,得到的单位向量与原向量方向相同,但长度为1。
例子:求向量 v ⃗ = ( 3 , 4 , 0 ) \vec{v} = (3, 4, 0) v=(3,4,0) 的单位向量。
v ^ = v ⃗ ∣ v ⃗ ∣ = ( 3 , 4 , 0 ) 5 = ( 3 5 , 4 5 , 0 ) \hat{v} = \frac{\vec{v}}{|\vec{v}|} = \frac{(3, 4, 0)}{5} = \left(\frac{3}{5}, \frac{4}{5}, 0\right) v^=∣v∣v=5(3,4,0)=(53,54,0)
可以验证 ∣ v ^ ∣ = ( 3 5 ) 2 + ( 4 5 ) 2 + 0 2 = 9 25 + 16 25 = 25 25 = 1 |\hat{v}| = \sqrt{\left(\frac{3}{5}\right)^2 + \left(\frac{4}{5}\right)^2 + 0^2} = \sqrt{\frac{9}{25} + \frac{16}{25}} = \sqrt{\frac{25}{25}} = 1 ∣v^∣=(53)2+(54)2+02=259+2516=2525=1。
2.2 向量的方向
向量的方向余弦
向量的方向余弦是描述向量在三维空间中方向的一种方法,它是向量与坐标轴正方向夹角的余弦值。
对于向量 a ⃗ = ( a 1 , a 2 , a 3 ) \vec{a} = (a_1, a_2, a_3) a=(a1,a2,a3),其方向余弦为:
cos α = a 1 ∣ a ⃗ ∣ , cos β = a 2 ∣ a ⃗ ∣ , cos γ = a 3 ∣ a ⃗ ∣ \cos \alpha = \frac{a_1}{|\vec{a}|}, \cos \beta = \frac{a_2}{|\vec{a}|}, \cos \gamma = \frac{a_3}{|\vec{a}|} cosα=∣a∣a1,cosβ=∣a∣a2,cosγ=∣a∣a3
其中, α \alpha α, β \beta β, γ \gamma γ 分别是向量 a ⃗ \vec{a} a 与 x x x, y y y, z z z 轴的夹角。
方向余弦实际上是向量单位化后的坐标分量:
a ^ = ( cos α , cos β , cos γ ) \hat{a} = (\cos \alpha, \cos \beta, \cos \gamma) a^=(cosα,cosβ,cosγ)
并且满足:
cos 2 α + cos 2 β + cos 2 γ = 1 \cos^2 \alpha + \cos^2 \beta + \cos^2 \gamma = 1 cos2α+cos2β+cos2γ=1
例子:求向量 v ⃗ = ( 3 , 4 , 0 ) \vec{v} = (3, 4, 0) v=(3,4,0) 的方向余弦。
cos α = 3 5 = 0.6 cos β = 4 5 = 0.8 cos γ = 0 5 = 0 \cos \alpha = \frac{3}{5} = 0.6 \\ \cos \beta = \frac{4}{5} = 0.8 \\ \cos \gamma = \frac{0}{5} = 0 cosα=53=0.6cosβ=54=0.8cosγ=50=0
这表示向量 v ⃗ \vec{v} v 与 x x x 轴的夹角约为 53. 1 ∘ 53.1^{\circ} 53.1∘,与 y y y 轴的夹角约为 36. 9 ∘ 36.9^{\circ} 36.9∘,与 z z z 轴的夹角为 9 0 ∘ 90^{\circ} 90∘。
向量与坐标系的关系
向量可以在任何坐标系中表示。在笛卡尔坐标系中,向量通常表示为 ( a 1 , a 2 , a 3 ) (a_1, a_2, a_3) (a1,a2,a3),也可以用基向量表示:
a ⃗ = a 1 i ⃗ + a 2 j ⃗ + a 3 k ⃗ \vec{a} = a_1\vec{i} + a_2\vec{j} + a_3\vec{k} a=a1i+a2j+a3k
其中, i ⃗ \vec{i} i, j ⃗ \vec{j} j, k ⃗ \vec{k} k 是坐标轴上的单位向量。
向量的坐标表示与坐标系的选择有关,但向量本身(作为几何对象)与坐标系无关。当坐标系改变时,向量的坐标表示会改变,但向量本身的长度和方向保持不变。
2.3 向量的夹角
向量夹角的定义
两个向量之间的夹角是指这两个向量所在直线间的较小角度,范围在 [ 0 , π ] [0, \pi] [0,π] 之间。
对于非零向量 a ⃗ \vec{a} a 和 b ⃗ \vec{b} b,它们之间的夹角 θ \theta θ 可以通过点积计算:
cos θ = a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ ∣ b ⃗ ∣ \cos \theta = \frac{\vec{a} \cdot \vec{b}}{|\vec{a}||\vec{b}|} cosθ=∣a∣∣b∣a⋅b
计算向量夹角(点积法)
向量的点积(或内积)定义为:
a ⃗ ⋅ b ⃗ = a 1 b 1 + a 2 b 2 + a 3 b 3 = ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos θ \vec{a} \cdot \vec{b} = a_1b_1 + a_2b_2 + a_3b_3 = |\vec{a}||\vec{b}|\cos\theta a⋅b=a1b1+a2b2+a3b3=∣a∣∣b∣cosθ
由此可以推导出计算夹角的公式:
θ = arccos ( a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ ∣ b ⃗ ∣ ) \theta = \arccos\left(\frac{\vec{a} \cdot \vec{b}}{|\vec{a}||\vec{b}|}\right) θ=arccos(∣a∣∣b∣a⋅b)
例子:计算向量 u ⃗ = ( 1 , 2 , 3 ) \vec{u} = (1, 2, 3) u=(1,2,3) 和 v ⃗ = ( 4 , 5 , 6 ) \vec{v} = (4, 5, 6) v=(4,5,6) 之间的夹角。
首先计算点积: u ⃗ ⋅ v ⃗ = 1 × 4 + 2 × 5 + 3 × 6 = 4 + 10 + 18 = 32 \vec{u} \cdot \vec{v} = 1 \times 4 + 2 \times 5 + 3 \times 6 = 4 + 10 + 18 = 32 u⋅v=1×4+2×5+3×6=4+10+18=32
然后计算各向量的模: ∣ u ⃗ ∣ = 1 2 + 2 2 + 3 2 = 14 ∣ v ⃗ ∣ = 4 2 + 5 2 + 6 2 = 77 |\vec{u}| = \sqrt{1^2 + 2^2 + 3^2} = \sqrt{14} \\ |\vec{v}| = \sqrt{4^2 + 5^2 + 6^2} = \sqrt{77} ∣u∣=12+22+32=14∣v∣=42+52+62=77
最后计算夹角: cos θ = u ⃗ ⋅ v ⃗ ∣ u ⃗ ∣ ∣ v ⃗ ∣ = 32 14 × 77 = 32 1078 ≈ 0.9746 \cos \theta = \frac{\vec{u} \cdot \vec{v}}{|\vec{u}||\vec{v}|} = \frac{32}{\sqrt{14} \times \sqrt{77}} = \frac{32}{\sqrt{1078}} \approx 0.9746 cosθ=∣u∣∣v∣u⋅v=14×7732=107832≈0.9746
θ = arccos ( 0.9746 ) ≈ 0.2257 弧度 ≈ 12.9 3 ∘ \theta = \arccos(0.9746) \approx 0.2257 \text{ 弧度} \approx 12.93^{\circ} θ=arccos(0.9746)≈0.2257 弧度≈12.93∘
因此,向量 u ⃗ \vec{u} u 和 v ⃗ \vec{v} v 之间的夹角约为 12.9 3 ∘ 12.93^{\circ} 12.93∘。
特殊情况:
- 如果 cos θ = 1 \cos \theta = 1 cosθ=1,则 θ = 0 \theta = 0 θ=0,表示两向量方向相同。
- 如果 cos θ = 0 \cos \theta = 0 cosθ=0,则 θ = 9 0 ∘ \theta = 90^{\circ} θ=90∘,表示两向量垂直。
- 如果 cos θ = − 1 \cos \theta = -1 cosθ=−1,则 θ = 18 0 ∘ \theta = 180^{\circ} θ=180∘,表示两向量方向相反。
3. 点积
3.1 点积(数量积)
点积的几何意义
点积(数量积)是向量运算中的基本操作之一,它将两个向量映射为一个标量。点积有多重几何意义:
1. 投影与分量表示
对于两个向量 a ⃗ \vec{a} a 和 b ⃗ \vec{b} b,它们的点积可以表示为:
a ⃗ ⋅ b ⃗ = ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos θ \vec{a} \cdot \vec{b} = |\vec{a}||\vec{b}|\cos\theta a⋅b=∣a∣∣b∣cosθ
其中 θ \theta θ 是两个向量之间的夹角。
这个公式揭示了点积的一个重要几何意义:点积等于一个向量的长度乘以另一个向量在该向量方向上的投影长度。
具体来说:
- ∣ b ⃗ ∣ cos θ |\vec{b}|\cos\theta ∣b∣cosθ 表示向量 b ⃗ \vec{b} b 在向量 a ⃗ \vec{a} a 方向上的投影长度
- ∣ a ⃗ ∣ cos θ |\vec{a}|\cos\theta ∣a∣cosθ 表示向量 a ⃗ \vec{a} a 在向量 b ⃗ \vec{b} b 方向上的投影长度
因此,点积可以理解为: a ⃗ ⋅ b ⃗ = ∣ a ⃗ ∣ × ( ∣ b ⃗ ∣ cos θ ) = ∣ b ⃗ ∣ × ( ∣ a ⃗ ∣ cos θ ) \vec{a} \cdot \vec{b} = |\vec{a}| \times (|\vec{b}|\cos\theta) = |\vec{b}| \times (|\vec{a}|\cos\theta) a⋅b=∣a∣×(∣b∣cosθ)=∣b∣×(∣a∣cosθ)
2. 向量间夹角的度量
从点积公式,我们可以得到:
cos θ = a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ ∣ b ⃗ ∣ \cos\theta = \frac{\vec{a} \cdot \vec{b}}{|\vec{a}||\vec{b}|} cosθ=∣a∣∣b∣a⋅b
这表明点积可以用来计算两个向量之间的夹角,这是点积的另一个重要几何意义。
3. 正交性检验
当两个向量 a ⃗ \vec{a} a 和 b ⃗ \vec{b} b 的点积为零时:
a ⃗ ⋅ b ⃗ = 0 \vec{a} \cdot \vec{b} = 0 a⋅b=0
这意味着 cos θ = 0 \cos\theta = 0 cosθ=0,即 θ = 90 ° \theta = 90° θ=90°,表示两个向量互相垂直(正交)。
因此,点积可以用来判断两个向量是否正交。
4. 方向相似性
点积的符号反映了两个向量方向的相似性:
- 如果 a ⃗ ⋅ b ⃗ > 0 \vec{a} \cdot \vec{b} > 0 a⋅b>0,则两向量夹角小于 90 ° 90° 90°(方向基本一致)
- 如果 a ⃗ ⋅ b ⃗ = 0 \vec{a} \cdot \vec{b} = 0 a⋅b=0,则两向量夹角等于 90 ° 90° 90°(互相垂直)
- 如果 a ⃗ ⋅ b ⃗ < 0 \vec{a} \cdot \vec{b} < 0 a⋅b<0,则两向量夹角大于 90 ° 90° 90°(方向基本相反)
5. 功的物理意义
在物理学中,点积表示力在位移方向上所做的功:
W = F ⃗ ⋅ d ⃗ = ∣ F ∣ ∣ d ∣ cos θ W = \vec{F} \cdot \vec{d} = |F||d|\cos\theta W=F⋅d=∣F∣∣d∣cosθ
其中 F ⃗ \vec{F} F 是力, d ⃗ \vec{d} d 是位移, θ \theta θ 是力与位移方向之间的夹角。
点积的代数公式
在三维笛卡尔坐标系中,给定两个向量:
a ⃗ = ( a 1 , a 2 , a 3 ) b ⃗ = ( b 1 , b 2 , b 3 ) \vec{a} = (a_1, a_2, a_3) \\ \vec{b} = (b_1, b_2, b_3) a=(a1,a2,a3)b=(b1,b2,b3)
它们的点积可以通过代数公式直接计算:
a ⃗ ⋅ b ⃗ = a 1 b 1 + a 2 b 2 + a 3 b 3 \vec{a} \cdot \vec{b} = a_1b_1 + a_2b_2 + a_3b_3 a⋅b=a1b1+a2b2+a3b3
这个公式是点积最常用的计算方法,它等价于对应分量相乘然后求和。
例子:计算向量 u ⃗ = ( 2 , 3 , − 1 ) \vec{u} = (2, 3, -1) u=(2,3,−1) 和 v ⃗ = ( 4 , 0 , 5 ) \vec{v} = (4, 0, 5) v=(4,0,5) 的点积。
u ⃗ ⋅ v ⃗ = 2 × 4 + 3 × 0 + ( − 1 ) × 5 = 8 + 0 − 5 = 3 \vec{u} \cdot \vec{v} = 2 \times 4 + 3 \times 0 + (-1) \times 5 = 8 + 0 - 5 = 3 u⋅v=2×4+3×0+(−1)×5=8+0−5=3
矩阵形式表示
点积也可以用矩阵乘法表示。如果将向量 a ⃗ \vec{a} a 和 b ⃗ \vec{b} b 分别表示为行向量和列向量,则:
a ⃗ ⋅ b ⃗ = [ a 1 a 2 a 3 ] [ b 1 b 2 b 3 ] = a 1 b 1 + a 2 b 2 + a 3 b 3 \vec{a} \cdot \vec{b} = \begin{bmatrix} a_1 & a_2 & a_3 \end{bmatrix} \begin{bmatrix} b_1 \\ b_2 \\ b_3 \end{bmatrix} = a_1b_1 + a_2b_2 + a_3b_3 a⋅b=[a1a2a3] b1b2b3 =a1b1+a2b2+a3b3
点积的性质
点积具有以下重要性质:
-
交换律: a ⃗ ⋅ b ⃗ = b ⃗ ⋅ a ⃗ \vec{a} \cdot \vec{b} = \vec{b} \cdot \vec{a} a⋅b=b⋅a
-
分配律: a ⃗ ⋅ ( b ⃗ + c ⃗ ) = a ⃗ ⋅ b ⃗ + a ⃗ ⋅ c ⃗ \vec{a} \cdot (\vec{b} + \vec{c}) = \vec{a} \cdot \vec{b} + \vec{a} \cdot \vec{c} a⋅(b+c)=a⋅b+a⋅c
-
标量乘法结合律: ( k a ⃗ ) ⋅ b ⃗ = a ⃗ ⋅ ( k b ⃗ ) = k ( a ⃗ ⋅ b ⃗ ) (k\vec{a}) \cdot \vec{b} = \vec{a} \cdot (k\vec{b}) = k(\vec{a} \cdot \vec{b}) (ka)⋅b=a⋅(kb)=k(a⋅b),其中 k k k 是标量
-
自身点积: a ⃗ ⋅ a ⃗ = ∣ a ⃗ ∣ 2 \vec{a} \cdot \vec{a} = |\vec{a}|^2 a⋅a=∣a∣2,即向量与自身的点积等于其长度的平方
这些性质使得点积在向量运算、线性代数、物理学和计算机图形学等领域有广泛应用。
3.2. 点积(数量积) 是如何被发现的? 并进行应用的?
点积的数学起源
点积(或数量积)的概念最早可以追溯到19世纪初,主要来源于几何学和物理学的发展。威廉·罗文·汉密尔顿(William Rowan Hamilton)和赫尔曼·格拉斯曼(Hermann Grassmann)在向量代数的发展中做出了重要贡献。
点积正式定义为两个向量 a ⃗ \vec{a} a和 b ⃗ \vec{b} b的乘积:
a ⃗ ⋅ b ⃗ = ∣ a ∣ ∣ b ∣ cos θ \vec{a} \cdot \vec{b} = |a||b|\cos\theta a⋅b=∣a∣∣b∣cosθ
其中 θ \theta θ是两个向量之间的夹角, ∣ a ∣ |a| ∣a∣和 ∣ b ∣ |b| ∣b∣分别是向量的模长。
在笛卡尔坐标系中,点积可以表示为各分量乘积之和:
a ⃗ ⋅ b ⃗ = a 1 b 1 + a 2 b 2 + . . . + a n b n \vec{a} \cdot \vec{b} = a_1b_1 + a_2b_2 + ... + a_nb_n a⋅b=a1b1+a2b2+...+anbn
对于三维空间中的向量:
a ⃗ ⋅ b ⃗ = a x b x + a y b y + a z b z \vec{a} \cdot \vec{b} = a_x b_x + a_y b_y + a_z b_z a⋅b=axbx+ayby+azbz
点积的物理学意义
点积最早的一个重要应用来自于物理学中的功的概念。当一个力 F ⃗ \vec{F} F作用在一个物体上,使其沿着位移 s ⃗ \vec{s} s方向移动时,所做的功 W W W定义为:
W = F ⃗ ⋅ s ⃗ = ∣ F ∣ ∣ s ∣ cos θ W = \vec{F} \cdot \vec{s} = |F||s|\cos\theta W=F⋅s=∣F∣∣s∣cosθ
这表明只有力在位移方向上的分量才对功有贡献,这是点积在物理学中的直观解释。
点积的主要应用
1. 投影计算
点积可以用来计算一个向量在另一个向量方向上的投影:
proj b ⃗ a ⃗ = a ⃗ ⋅ b ⃗ ∣ b ⃗ ∣ = ∣ a ∣ cos θ \text{proj}_{\vec{b}}\vec{a} = \frac{\vec{a} \cdot \vec{b}}{|\vec{b}|} = |a|\cos\theta projba=∣b∣a⋅b=∣a∣cosθ
2. 向量的正交性判断
两个向量 a ⃗ \vec{a} a和 b ⃗ \vec{b} b正交(垂直)当且仅当它们的点积为零:
a ⃗ ⊥ b ⃗ ⟺ a ⃗ ⋅ b ⃗ = 0 \vec{a} \perp \vec{b} \iff \vec{a} \cdot \vec{b} = 0 a⊥b⟺a⋅b=0
3. 向量夹角计算
利用点积可以计算两个向量之间的夹角:
cos θ = a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ ∣ b ⃗ ∣ \cos\theta = \frac{\vec{a} \cdot \vec{b}}{|\vec{a}||\vec{b}|} cosθ=∣a∣∣b∣a⋅b
4. 线性代数中的应用
在线性代数中,点积是定义向量空间内积的基础,用于:
Gram-Schmidt正交化过程 最小二乘法 特征值和特征向量计算 \begin{align} &\text{Gram-Schmidt正交化过程} \\ &\text{最小二乘法} \\ &\text{特征值和特征向量计算} \end{align} Gram-Schmidt正交化过程最小二乘法特征值和特征向量计算
5. 计算机图形学中的应用
点积在计算机图形学中有广泛应用:
光照模型计算 表面法线与光源方向的关系 物体碰撞检测 \begin{align} &\text{光照模型计算} \\ &\text{表面法线与光源方向的关系} \\ &\text{物体碰撞检测} \end{align} 光照模型计算表面法线与光源方向的关系物体碰撞检测
特别是在漫反射光照模型中,表面亮度正比于表面法向量 n ⃗ \vec{n} n与光源方向 l ⃗ \vec{l} l的点积:
I d = k d ( n ⃗ ⋅ l ⃗ ) I_d = k_d(\vec{n} \cdot \vec{l}) Id=kd(n⋅l)
6. 机器学习中的应用
在机器学习领域,点积用于计算相似度度量:
相似度 ( a ⃗ , b ⃗ ) = a ⃗ ⋅ b ⃗ ∣ a ⃗ ∣ ∣ b ⃗ ∣ \text{相似度}(\vec{a}, \vec{b}) = \frac{\vec{a} \cdot \vec{b}}{|\vec{a}||\vec{b}|} 相似度(a,b)=∣a∣∣b∣a⋅b
这一概念在余弦相似度、核方法和神经网络中都有重要应用。
总结
点积作为向量运算的基本操作,从几何和物理学的概念演变为现代数学、物理学和计算机科学中的核心工具。它的简洁形式与强大功能使其成为解决各种问题的关键数学工具。
4. 叉积(向量积)
4.1. 叉积基础
4.1. 叉积的几何意义
叉积(向量积)是一种特殊的向量乘法运算,其结果是一个向量而非标量。对于两个向量 a ⃗ \vec{a} a和 b ⃗ \vec{b} b,它们的叉积 a ⃗ × b ⃗ \vec{a} \times \vec{b} a×b具有以下几何特性:
-
方向性:叉积所得向量垂直于原两个向量所在平面,遵循右手法则确定方向。将右手四指从第一个向量转向第二个向量,此时大拇指所指方向即为叉积向量的方向。
-
大小:叉积向量的模长等于两个向量模长与它们夹角正弦的乘积: ∣ a ⃗ × b ⃗ ∣ = ∣ a ∣ ∣ b ∣ sin θ |\vec{a} \times \vec{b}| = |a||b|\sin\theta ∣a×b∣=∣a∣∣b∣sinθ
-
几何解释:叉积向量的模长等于由两个原始向量构成的平行四边形的面积。
-
正交性:叉积结果与原两个向量都正交,即: ( a ⃗ × b ⃗ ) ⋅ a ⃗ = 0 (\vec{a} \times \vec{b}) \cdot \vec{a} = 0 (a×b)⋅a=0 ( a ⃗ × b ⃗ ) ⋅ b ⃗ = 0 (\vec{a} \times \vec{b}) \cdot \vec{b} = 0 (a×b)⋅b=0
叉积的代数公式
1. 坐标形式表达
在三维笛卡尔坐标系中,给定两个向量 a ⃗ = ( a x , a y , a z ) \vec{a} = (a_x, a_y, a_z) a=(ax,ay,az)和 b ⃗ = ( b x , b y , b z ) \vec{b} = (b_x, b_y, b_z) b=(bx,by,bz),它们的叉积可以表示为:
a ⃗ × b ⃗ = ( a y b z − a z b y a z b x − a x b z a x b y − a y b x ) \vec{a} \times \vec{b} = \begin{pmatrix} a_y b_z - a_z b_y \\ a_z b_x - a_x b_z \\ a_x b_y - a_y b_x \end{pmatrix} a×b= aybz−azbyazbx−axbzaxby−aybx
2. 行列式形式表达
叉积还可以通过行列式形式优雅地表达:
a ⃗ × b ⃗ = ∣ i ⃗ j ⃗ k ⃗ a x a y a z b x b y b z ∣ \vec{a} \times \vec{b} = \begin{vmatrix} \vec{i} & \vec{j} & \vec{k} \\ a_x & a_y & a_z \\ b_x & b_y & b_z \end{vmatrix} a×b= iaxbxjaybykazbz
展开后得到:
a ⃗ × b ⃗ = ( a y b z − a z b y ) i ⃗ − ( a x b z − a z b x ) j ⃗ + ( a x b y − a y b x ) k ⃗ \vec{a} \times \vec{b} = (a_y b_z - a_z b_y)\vec{i} - (a_x b_z - a_z b_x)\vec{j} + (a_x b_y - a_y b_x)\vec{k} a×b=(aybz−azby)i−(axbz−azbx)j+(axby−aybx)k
3. 叉积的性质
叉积具有以下重要性质:
- 反交换律: a ⃗ × b ⃗ = − ( b ⃗ × a ⃗ ) \vec{a} \times \vec{b} = -(\vec{b} \times \vec{a}) a×b=−(b×a)
- 分配律: a ⃗ × ( b ⃗ + c ⃗ ) = a ⃗ × b ⃗ + a ⃗ × c ⃗ \vec{a} \times (\vec{b} + \vec{c}) = \vec{a} \times \vec{b} + \vec{a} \times \vec{c} a×(b+c)=a×b+a×c
- 标量乘法的结合律: k ( a ⃗ × b ⃗ ) = ( k a ⃗ ) × b ⃗ = a ⃗ × ( k b ⃗ ) k(\vec{a} \times \vec{b}) = (k\vec{a}) \times \vec{b} = \vec{a} \times (k\vec{b}) k(a×b)=(ka)×b=a×(kb),其中 k k k是标量
- 不满足结合律:一般情况下, a ⃗ × ( b ⃗ × c ⃗ ) ≠ ( a ⃗ × b ⃗ ) × c ⃗ \vec{a} \times (\vec{b} \times \vec{c}) \neq (\vec{a} \times \vec{b}) \times \vec{c} a×(b×c)=(a×b)×c
- 拉格朗日恒等式: a ⃗ × ( b ⃗ × c ⃗ ) = b ⃗ ( a ⃗ ⋅ c ⃗ ) − c ⃗ ( a ⃗ ⋅ b ⃗ ) \vec{a} \times (\vec{b} \times \vec{c}) = \vec{b}(\vec{a} \cdot \vec{c}) - \vec{c}(\vec{a} \cdot \vec{b}) a×(b×c)=b(a⋅c)−c(a⋅b)
叉积的应用
1. 法向量计算
叉积最常见的应用是确定平面的法向量。给定平面上的两个非平行向量 a ⃗ \vec{a} a和 b ⃗ \vec{b} b,它们的叉积 a ⃗ × b ⃗ \vec{a} \times \vec{b} a×b就是该平面的一个法向量。这在计算机图形学中尤为重要,用于:
- 确定多边形面的方向
- 计算表面的法线,用于光照模型
- 实现背面剔除算法
2. 面积计算
叉积可用于计算由两个向量所确定的平行四边形面积:
S 平行四边形 = ∣ a ⃗ × b ⃗ ∣ S_{平行四边形} = |\vec{a} \times \vec{b}| S平行四边形=∣a×b∣
三角形面积则为:
S 三角形 = 1 2 ∣ a ⃗ × b ⃗ ∣ S_{三角形} = \frac{1}{2}|\vec{a} \times \vec{b}| S三角形=21∣a×b∣
这可扩展到计算任意多边形的面积。
3. 体积计算
三个向量 a ⃗ \vec{a} a、 b ⃗ \vec{b} b和 c ⃗ \vec{c} c所确定的平行六面体体积可通过混合积(标量三重积)计算:
V = ∣ ( a ⃗ × b ⃗ ) ⋅ c ⃗ ∣ V = |(\vec{a} \times \vec{b}) \cdot \vec{c}| V=∣(a×b)⋅c∣
4. 力学中的应用
在物理学中,叉积用于计算:
- 力矩: τ ⃗ = r ⃗ × F ⃗ \vec{\tau} = \vec{r} \times \vec{F} τ=r×F,其中 r ⃗ \vec{r} r是力臂向量, F ⃗ \vec{F} F是力
- 角动量: L ⃗ = r ⃗ × p ⃗ \vec{L} = \vec{r} \times \vec{p} L=r×p,其中 p ⃗ \vec{p} p是线动量
- 磁场中的洛伦兹力: F ⃗ = q v ⃗ × B ⃗ \vec{F} = q\vec{v} \times \vec{B} F=qv×B,其中 q q q是电荷, v ⃗ \vec{v} v是速度, B ⃗ \vec{B} B是磁感应强度
5. 计算机图形学和计算几何
- 光照模型:计算表面法向量,实现Phong光照模型等
- 视锥体裁剪:确定点是否在视锥体内部
- 碰撞检测:判断物体是否相交
- 三维旋转:通过叉积定义旋转轴和角度
6. 坐标系变换
叉积可用于构建正交坐标系。给定一个单位向量 n ⃗ \vec{n} n,可以找到与之正交的两个向量,构成一个本地坐标系。
7. 机器人学和运动学
- 计算关节角度和旋转
- 确定机械臂末端执行器的位置和方向
- 路径规划和避障算法
总结
叉积作为一种基本的向量运算,在数学、物理、计算机图形学和工程领域具有广泛应用。它不仅能够提供向量间关系的几何直观理解,还能解决实际问题中的方向、面积、体积计算等需求。理解叉积的几何意义和代数表达对于深入学习相关学科具有重要价值。
4.2. 叉积是如何被发现及被应用的
叉积的历史起源
叉积(向量积)的概念有着丰富的历史背景,其发展经历了多个阶段:
初期概念和几何学前身
叉积概念的雏形可以追溯到19世纪初期。当时数学家正致力于发展能够处理三维空间中几何问题的工具。虽然向量的概念尚未完全形成,但已有对方向性量的初步理解。
向量代数的发展
叉积的正式发展与向量分析的兴起密切相关。关键的历史贡献者包括:
-
威廉·罗文·汉密尔顿(William Rowan Hamilton,1805-1865):
- 1843年发明了四元数系统,这是向量分析的一个重要前身
- 四元数的乘法包含了类似叉积的运算
-
赫尔曼·格拉斯曼(Hermann Grassmann,1809-1877):
- 在1844年出版的《线性扩张理论》(Die lineale Ausdehnungslehre)中引入了外积的概念
- 格拉斯曼的外积是现代叉积概念的直接前身
- 他的工作当时未被广泛认可,但后来被证明具有开创性意义
-
约西亚·威拉德·吉布斯(Josiah Willard Gibbs,1839-1903):
- 在1880年代系统化了向量分析
- 明确定义了叉积作为向量运算的基本操作之一
- 通过他的教学和著作,使叉积成为物理学和工程学中的标准工具
-
奥利弗·黑维赛德(Oliver Heaviside,1850-1925):
- 独立于吉布斯,发展了类似的向量分析系统
- 提供了叉积在电磁学中的应用
叉积的应用发展历程
物理学中的早期应用
叉积的概念最初主要应用于物理学,特别是在力学和电磁学领域:
-
力学(19世纪中后期):
- 角动量的数学表达: L ⃗ = r ⃗ × p ⃗ \vec{L} = \vec{r} \times \vec{p} L=r×p
- 力矩的计算: τ ⃗ = r ⃗ × F ⃗ \vec{\tau} = \vec{r} \times \vec{F} τ=r×F
- 这些表达式极大地简化了旋转运动的分析
-
电磁学(19世纪末):
- 麦克斯韦方程组的向量形式利用了叉积
- 毕奥-萨伐尔定律的向量表达
- 洛伦兹力公式: F ⃗ = q v ⃗ × B ⃗ \vec{F} = q\vec{v} \times \vec{B} F=qv×B
数学工具的扩展(20世纪初)
随着数学的发展,叉积的应用扩展到更多领域:
-
微分几何学:
- 曲面理论中的法向量计算
- Frenet-Serret公式中描述空间曲线
-
向量微积分:
- 旋度(curl)运算的定义: ∇ × F ⃗ \nabla \times \vec{F} ∇×F
- 斯托克斯定理的向量表达
工程与计算应用(20世纪中后期)
随着计算技术的发展,叉积在工程和计算领域获得了广泛应用:
-
航空航天工程(1950年代起):
- 飞行器姿态控制
- 轨道力学计算
- 导航系统设计
-
计算机图形学(1960-70年代):
- 埃德温·卡特姆尔(Edwin Catmull)和其他先驱将叉积引入三维图形渲染
- 用于计算表面法向量,实现光照模型
- 隐藏面消除算法
-
机器人学(1970-80年代):
- 机械臂运动学和动力学分析
- 路径规划算法
- 碰撞检测
现代应用(1990年代至今)
-
计算几何学和计算机视觉:
- 三维重建
- 特征点匹配
- SLAM(同时定位与地图构建)算法
-
物理模拟:
- 流体动力学模拟
- 布料和柔性物体模拟
- 粒子系统
-
游戏开发:
- 碰撞检测
- 物理引擎
- 摄像机控制
-
图形处理器(GPU)技术:
- 叉积运算在现代GPU中被硬件加速
- 实时渲染和光线追踪
叉积的数学理解演变
叉积概念的理解也随着数学的发展而不断深化:
-
从几何到代数:
- 最初主要作为几何工具理解(平行四边形面积)
- 逐渐发展为代数运算(行列式表达)
-
从三维到高维:
- 传统叉积限于三维空间
- 现代外代数扩展了这一概念到任意维度(外积)
-
与其他数学概念的联系:
- 与行列式的关系
- 与李代数的联系
- 在微分形式中的应用
总结
叉积的发现和应用历程展示了一个数学概念如何从抽象理论发展为解决实际问题的强大工具。从格拉斯曼和汉密尔顿的早期工作,到吉布斯系统化的向量分析,再到现代计算机图形学和物理模拟,叉积已成为连接数学理论与工程应用的重要桥梁。
这一数学运算不仅简化了对物理现象的描述,还为现代技术如计算机图形学、机器人学和虚拟现实提供了必不可少的计算工具。叉积的历史发展也体现了数学如何通过抽象概念来解决实际问题的力量。
4.3. 叉积意义或者作用是啥?
叉积(向量积)作为一种重要的向量运算,具有丰富的意义和广泛的应用价值。以下是叉积的主要意义和作用:
几何意义
-
垂直向量的构造:叉积提供了一种构造垂直于两个给定向量的第三个向量的方法。这在三维空间中尤为重要,使我们能够构建相互正交的坐标系。
-
面积测量:两个向量 a ⃗ \vec{a} a和 b ⃗ \vec{b} b的叉积的模长 ∣ a ⃗ × b ⃗ ∣ |\vec{a} \times \vec{b}| ∣a×b∣等于由这两个向量构成的平行四边形的面积。这提供了计算几何形状面积的有效方法。
-
方向性的表示:叉积的方向(根据右手法则确定)提供了判断两个向量相对位置关系的方法。这在确定旋转方向、表面朝向等问题上非常有用。
物理意义
-
角动量:在物理学中,角动量 L ⃗ = r ⃗ × p ⃗ \vec{L} = \vec{r} \times \vec{p} L=r×p通过叉积定义,其中 r ⃗ \vec{r} r是位置向量, p ⃗ \vec{p} p是线动量。
-
力矩:力矩 τ ⃗ = r ⃗ × F ⃗ \vec{\tau} = \vec{r} \times \vec{F} τ=r×F表示力作用产生旋转效果的大小和方向,通过位置向量与力向量的叉积计算。
-
磁场相互作用:洛伦兹力 F ⃗ = q v ⃗ × B ⃗ \vec{F} = q\vec{v} \times \vec{B} F=qv×B描述了带电粒子在磁场中受到的力,通过速度向量与磁场向量的叉积计算。
-
旋度(Curl):矢量场的旋度 ∇ × F ⃗ \nabla \times \vec{F} ∇×F利用叉积操作定义,表示场的旋转趋势。
计算与工程应用
-
法向量计算:在计算机图形学中,通过叉积计算表面的法向量,是光照模型和渲染的基础。
-
姿态确定:在航空航天、机器人学中,叉积用于确定物体的姿态和方向。
-
碰撞检测:在游戏开发和物理引擎中,叉积用于判断点是否在某一侧,是实现碰撞检测的重要工具。
-
坐标变换:在构建局部坐标系统时,叉积可以创建相互正交的基向量。
数学意义
-
反对称性:叉积的反交换律( a ⃗ × b ⃗ = − ( b ⃗ × a ⃗ ) \vec{a} \times \vec{b} = -(\vec{b} \times \vec{a}) a×b=−(b×a))体现了向量空间中的反对称性质。
-
李代数联系:叉积与李代数中的李括号有密切联系,在群论和微分几何中具有重要意义。
-
外代数基础:叉积是外代数中外积的特例(限于三维空间),为更高级的数学结构提供了基础。
总结
叉积的核心意义在于它提供了一种同时包含大小和方向信息的向量运算,能够捕捉到两个向量之间的"垂直关系"。这种特性使叉积成为解决各类几何问题、物理模型和工程应用的强大工具。叉积连接了代数与几何、理论与应用,是向量代数中最具实用价值的运算之一。
5. 向量的投影
5.1. 向量的投影
向量投影的概念
向量投影是指一个向量在另一个向量方向上的分量。直观地理解,就是将一个向量"影子"投射到另一个向量所在的直线上。
标量投影
如果有两个向量 a ⃗ \vec{a} a 和 b ⃗ \vec{b} b, a ⃗ \vec{a} a 在 b ⃗ \vec{b} b 方向上的标量投影为:
proj b ⃗ a ⃗ = a ⃗ ⋅ b ⃗ ∣ b ⃗ ∣ \text{proj}_{\vec{b}} \vec{a} = \frac{\vec{a} \cdot \vec{b}}{|\vec{b}|} projba=∣b∣a⋅b
其中:
- a ⃗ ⋅ b ⃗ \vec{a} \cdot \vec{b} a⋅b 是向量 a ⃗ \vec{a} a 和 b ⃗ \vec{b} b 的点积
- ∣ b ⃗ ∣ |\vec{b}| ∣b∣ 是向量 b ⃗ \vec{b} b 的长度(模)
向量投影
a ⃗ \vec{a} a 在 b ⃗ \vec{b} b 方向上的向量投影是一个与 b ⃗ \vec{b} b 方向相同的向量,其大小等于标量投影:
proj b ⃗ a ⃗ = a ⃗ ⋅ b ⃗ ∣ b ⃗ ∣ 2 b ⃗ \text{proj}_{\vec{b}} \vec{a} = \frac{\vec{a} \cdot \vec{b}}{|\vec{b}|^2} \vec{b} projba=∣b∣2a⋅bb
或者,使用单位向量 b ^ = b ⃗ ∣ b ⃗ ∣ \hat{b} = \frac{\vec{b}}{|\vec{b}|} b^=∣b∣b,可以简化为:
proj b ⃗ a ⃗ = ( a ⃗ ⋅ b ^ ) b ^ \text{proj}_{\vec{b}} \vec{a} = (\vec{a} \cdot \hat{b}) \hat{b} projba=(a⋅b^)b^
几何意义
从几何角度看,向量投影有以下含义:
- 如果两个向量夹角为锐角(小于90°),投影为正值
- 如果两个向量夹角为钝角(大于90°),投影为负值
- 如果两个向量垂直(夹角为90°),投影为零
应用实例
例1:二维向量投影计算
假设有向量 a ⃗ = ( 3 , 4 ) \vec{a} = (3, 4) a=(3,4) 和 b ⃗ = ( 1 , 0 ) \vec{b} = (1, 0) b=(1,0)
计算 a ⃗ \vec{a} a 在 b ⃗ \vec{b} b 上的投影:
- a ⃗ ⋅ b ⃗ = 3 × 1 + 4 × 0 = 3 \vec{a} \cdot \vec{b} = 3 \times 1 + 4 \times 0 = 3 a⋅b=3×1+4×0=3
- ∣ b ⃗ ∣ = 1 2 + 0 2 = 1 |\vec{b}| = \sqrt{1^2 + 0^2} = 1 ∣b∣=12+02=1
- 标量投影 = 3 1 = 3 \frac{3}{1} = 3 13=3
- 向量投影 = 3 × ( 1 , 0 ) = ( 3 , 0 ) 3 \times (1, 0) = (3, 0) 3×(1,0)=(3,0)
例2:三维向量投影
假设有向量 a ⃗ = ( 2 , 3 , 4 ) \vec{a} = (2, 3, 4) a=(2,3,4) 和 b ⃗ = ( 1 , 2 , 2 ) \vec{b} = (1, 2, 2) b=(1,2,2)
计算 a ⃗ \vec{a} a 在 b ⃗ \vec{b} b 上的投影:
- a ⃗ ⋅ b ⃗ = 2 × 1 + 3 × 2 + 4 × 2 = 2 + 6 + 8 = 16 \vec{a} \cdot \vec{b} = 2 \times 1 + 3 \times 2 + 4 \times 2 = 2 + 6 + 8 = 16 a⋅b=2×1+3×2+4×2=2+6+8=16
- ∣ b ⃗ ∣ = 1 2 + 2 2 + 2 2 = 9 = 3 |\vec{b}| = \sqrt{1^2 + 2^2 + 2^2} = \sqrt{9} = 3 ∣b∣=12+22+22=9=3
- 标量投影 = 16 3 ≈ 5.33 \frac{16}{3} \approx 5.33 316≈5.33
- ∣ b ⃗ ∣ 2 = 9 |\vec{b}|^2 = 9 ∣b∣2=9
- 向量投影 = 16 9 × ( 1 , 2 , 2 ) ≈ ( 1.78 , 3.56 , 3.56 ) \frac{16}{9} \times (1, 2, 2) \approx (1.78, 3.56, 3.56) 916×(1,2,2)≈(1.78,3.56,3.56)
正交分解
向量投影可以用来进行正交分解。任何向量 a ⃗ \vec{a} a 都可以表示为两个分量的和:
- 一个是沿着 b ⃗ \vec{b} b 方向的分量(即投影)
- 一个是垂直于 b ⃗ \vec{b} b 的分量
a ⃗ = proj b ⃗ a ⃗ + a ⃗ ⊥ \vec{a} = \text{proj}_{\vec{b}} \vec{a} + \vec{a}_{\perp} a=projba+a⊥
其中 a ⃗ ⊥ \vec{a}_{\perp} a⊥ 表示 a ⃗ \vec{a} a 垂直于 b ⃗ \vec{b} b 的分量,可以通过下面的公式计算:
a ⃗ ⊥ = a ⃗ − proj b ⃗ a ⃗ \vec{a}_{\perp} = \vec{a} - \text{proj}_{\vec{b}} \vec{a} a⊥=a−projba
实际应用
向量投影在许多领域都有应用:
- 物理学:分解力(如斜面上的物体受力分析)
- 计算机图形学:光照计算、阴影投射
- 机器学习:特征提取、降维
- 信号处理:滤波、信号分解
向量投影是理解更复杂线性代数概念(如最小二乘法、正交基和投影矩阵)的基础。
5.2. 标量投影和向量投影的区别和联系
区别
1. 表示方式
- 标量投影:是一个数值(标量),表示一个向量在另一个向量方向上的长度或分量大小
- 向量投影:是一个向量,具有大小和方向,指向与被投影向量相同或相反的方向
2. 数学表达式
- 标量投影: proj b ⃗ a ⃗ = a ⃗ ⋅ b ⃗ ∣ b ⃗ ∣ = ∣ a ⃗ ∣ cos θ \text{proj}_{\vec{b}} \vec{a} = \frac{\vec{a} \cdot \vec{b}}{|\vec{b}|} = |\vec{a}|\cos\theta projba=∣b∣a⋅b=∣a∣cosθ
- 向量投影: proj b ⃗ a ⃗ = a ⃗ ⋅ b ⃗ ∣ b ⃗ ∣ 2 b ⃗ = a ⃗ ⋅ b ⃗ ∣ b ⃗ ∣ ⋅ b ⃗ ∣ b ⃗ ∣ \text{proj}_{\vec{b}} \vec{a} = \frac{\vec{a} \cdot \vec{b}}{|\vec{b}|^2} \vec{b} = \frac{\vec{a} \cdot \vec{b}}{|\vec{b}|} \cdot \frac{\vec{b}}{|\vec{b}|} projba=∣b∣2a⋅bb=∣b∣a⋅b⋅∣b∣b
3. 几何意义
- 标量投影:表示向量 a ⃗ \vec{a} a在向量 b ⃗ \vec{b} b方向上投影的长度,可正可负
- 向量投影:表示与向量 b ⃗ \vec{b} b平行且长度等于标量投影的向量
4. 单位
- 标量投影:与向量长度单位相同
- 向量投影:与原向量单位相同,是一个向量量
联系
1. 数学关系
向量投影可以通过标量投影得到: 向量投影 = 标量投影 ⋅ b ^ \text{向量投影} = \text{标量投影} \cdot \hat{b} 向量投影=标量投影⋅b^ 其中 b ^ \hat{b} b^是向量 b ⃗ \vec{b} b的单位向量。
2. 计算过程
计算向量投影时,通常先计算标量投影,再乘以单位方向向量:
- 求出标量投影: a ⃗ ⋅ b ⃗ ∣ b ⃗ ∣ \frac{\vec{a} \cdot \vec{b}}{|\vec{b}|} ∣b∣a⋅b
- 将标量投影乘以 b ⃗ \vec{b} b的单位向量: a ⃗ ⋅ b ⃗ ∣ b ⃗ ∣ ⋅ b ⃗ ∣ b ⃗ ∣ \frac{\vec{a} \cdot \vec{b}}{|\vec{b}|} \cdot \frac{\vec{b}}{|\vec{b}|} ∣b∣a⋅b⋅∣b∣b
3. 符号一致性
标量投影的符号决定了向量投影的方向:
- 当标量投影为正时,向量投影与 b ⃗ \vec{b} b方向相同
- 当标量投影为负时,向量投影与 b ⃗ \vec{b} b方向相反
- 当标量投影为零时,向量投影为零向量
4. 应用互补
两种投影在不同情境下互为补充:
- 需要长度时,使用标量投影
- 需要方向和大小时,使用向量投影
- 在物理应用中,如力的分解,两者通常一起使用
通过理解这两种投影的区别和联系,可以更灵活地应用向量投影概念解决实际问题。
5.3. 向量投影的意义在哪?
向量投影是线性代数中一个基础但极其重要的概念,它在理论和实际应用中都有深远的意义:
1. 分解复杂问题
向量投影允许我们将复杂的向量分解成更简单、更易处理的分量。这种分解使我们能够:
- 将一个力分解为沿着特定方向的分量和垂直于该方向的分量
- 将一个复杂运动分解为多个简单运动的组合
- 将高维数据投影到低维空间进行分析
2. 物理学应用
在物理学中,向量投影有广泛应用:
- 力学:计算物体在斜面上的运动,分析摩擦力和支持力
- 电磁学:电场和磁场在特定方向的分量计算
- 光学:光的反射和折射分析
- 相对运动:物体运动在特定参考系中的表示
3. 量化相似度与关联性
向量投影提供了一种量化两个向量相似程度的方法:
- 投影值越大,两个向量在该方向上的相似度越高
- 在信息检索和机器学习中,用于衡量文档、特征或样本之间的相似度
4. 数学基础
向量投影是许多高级数学概念的基础:
- 最小二乘法:寻找最佳拟合直线或平面
- 傅里叶分析:将信号分解为不同频率的正弦波
- 正交分解:将向量空间分解为正交子空间
- 特征值和特征向量:理解线性变换
5. 计算机科学与图形学
- 图像处理:图像旋转、缩放和变形
- 计算机图形学:3D渲染、光照计算、阴影投射
- 计算机视觉:物体识别、运动跟踪
- 游戏开发:碰撞检测、物理引擎
6. 数据科学与机器学习
- 主成分分析(PCA):数据降维和特征提取
- 支持向量机(SVM):寻找最优分类超平面
- 投影追踪:寻找高维数据中的低维结构
- 自然语言处理:词向量表示和相似度计算
7. 工程应用
- 结构工程:分析结构上的力和应力
- 电气工程:信号处理和滤波器设计
- 航空航天:飞行轨迹规划和控制
- 机器人学:运动规划和障碍物避免
向量投影的核心意义在于它提供了一种将复杂问题简化的方法,使我们能够从特定角度分析问题,并为许多科学和工程领域提供了强大的数学工具。它不仅是理解线性代数的关键,也是许多实际应用的基础。


















 813
813

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











