






一、 简介
MediaPipe是⼀款由Google开发并开源的数据流处理机器学习应⽤开发框架。它是⼀个基于图的数据处理管线,⽤于构建使⽤了多种形式的数据源,如视频、⾳频、传感器数据以及任何时间序列数据。MediaPipe是跨平台的,可以运⾏在嵌⼊式平台(树莓派等),移动设备(iOS和Android),⼯作站和服务器上,并⽀持移动端GPU加速。 MediaPipe为实时和流媒体提供跨平台、可定制的ML解决⽅案。
MediaPipe 的核⼼框架由 C++ 实现,并提供 Java 以及 Objective C 等语⾔的⽀持。MediaPipe 的主要概念包括数据包(Packet)、数据流(Stream)、计算单元(Calculator)、图(Graph)以及⼦图(Subgraph)。
MediaPipe的特点:
- 端到端加速:内置的快速ML推理和处理即使在普通硬件上也能加速。
- ⼀次构建,随时随地部署:统⼀解决⽅案适⽤于Android、iOS、桌⾯/云、web和物联⽹。
- 即⽤解决⽅案:展⽰框架全部功能的尖端ML解决⽅案。
- 免费开源:Apache2.0下的框架和解决⽅案,完全可扩展和定制。
二、实验源码
#!/usr/bin/env python3
# encoding: utf-8
import mediapipe as mp
import cv2 as cv
import time
class Objectron:
def __init__(self, staticMode=False, maxObjects=5, minDetectionCon=0.5, minTrackingCon=0.99):
self.staticMode=staticMode
self.maxObjects=maxObjects
self.minDetectionCon=minDetectionCon
self.minTrackingCon=minTrackingCon
self.index=0
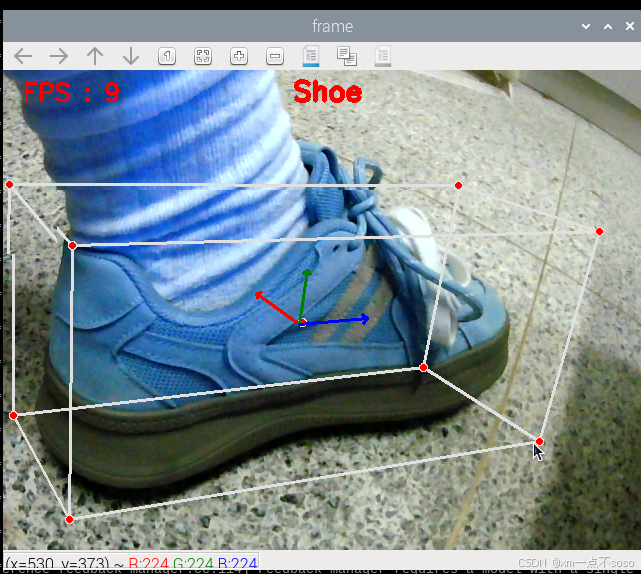
self.modelNames = ['Shoe', 'Chair', 'Cup', 'Camera']
self.mpObjectron = mp.solutions.objectron
self.mpDraw = mp.solutions.drawing_utils
self.mpobjectron = self.mpObjectron.Objectron(
self.staticMode, self.maxObjects, self.minDetectionCon, self.minTrackingCon, self.modelNames[self.index])
def findObjectron(self, frame):
cv.putText(frame, self.modelNames[self.index], (int(frame.shape[1] / 2) - 30, 30),
cv.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 3)
img_RGB = cv.cvtColor(frame, cv.COLOR_BGR2RGB)
results = self.mpobjectron.process(img_RGB)
if results.detected_objects:
for id, detection in enumerate(results.detected_objects):
self.mpDraw.draw_landmarks(frame, detection.landmarks_2d, self.mpObjectron.BOX_CONNECTIONS)
self.mpDraw.draw_axis(frame, detection.rotation, detection.translation)
return frame
def configUP(self):
self.index += 1
if self.index>=4:self.index=0
self.mpobjectron = self.mpObjectron.Objectron(
self.staticMode, self.maxObjects, self.minDetectionCon, self.minTrackingCon, self.modelNames[self.index])
if __name__ == '__main__':
capture = cv.VideoCapture(0)
capture.set(6, cv.VideoWriter.fourcc('M', 'J', 'P', 'G'))
capture.set(cv.CAP_PROP_FRAME_WIDTH, 640)
capture.set(cv.CAP_PROP_FRAME_HEIGHT, 480)
print("capture get FPS : ", capture.get(cv.CAP_PROP_FPS))
pTime = cTime = 0
objectron = Objectron()
while capture.isOpened():
ret, frame = capture.read()
# frame = cv.flip(frame, 1)
action = cv.waitKey(1) & 0xFF
if action == ord('q'): break
if action == ord('f') or action == ord('F') : objectron.configUP()
frame = objectron.findObjectron(frame)
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
text = "FPS : " + str(int(fps))
cv.putText(frame, text, (20, 30), cv.FONT_HERSHEY_SIMPLEX, 0.8, (0, 0, 255), 2)
cv.imshow('frame', frame)
capture.release()
cv.destroyAllWindows()
三维物体识别:可识别的物体有:【'Shoe', 'Chair', 'Cup', 'Camera'】,⼀共4类;点击【F键】切换识别物体。
注意: 以下面命令需要vnc登录小车运行。
cd /home/pi/project_demo/07.AI_Visual_Recognition/mediapipe/14.3D_object_recognition
python3 Objectron_USB.py
若想要退出程序运行,可以在预览窗口按q或者终端按Ctrl+C终止程序!

















 618
618

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









