







需要用到calib.txt文件,但对其内容不怎么理解。这里做一下笔记。
sequence0 calib.txt
P0: 7.188560000000e+02 0.000000000000e+00 6.071928000000e+02 0.000000000000e+00 0.000000000000e+00 7.188560000000e+02 1.852157000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
P1: 7.188560000000e+02 0.000000000000e+00 6.071928000000e+02 -3.861448000000e+02 0.000000000000e+00 7.188560000000e+02 1.852157000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
P2: 7.188560000000e+02 0.000000000000e+00 6.071928000000e+02 4.538225000000e+01 0.000000000000e+00 7.188560000000e+02 1.852157000000e+02 -1.130887000000e-01 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 3.779761000000e-03
P3: 7.188560000000e+02 0.000000000000e+00 6.071928000000e+02 -3.372877000000e+02 0.000000000000e+00 7.188560000000e+02 1.852157000000e+02 2.369057000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 4.915215000000e-03
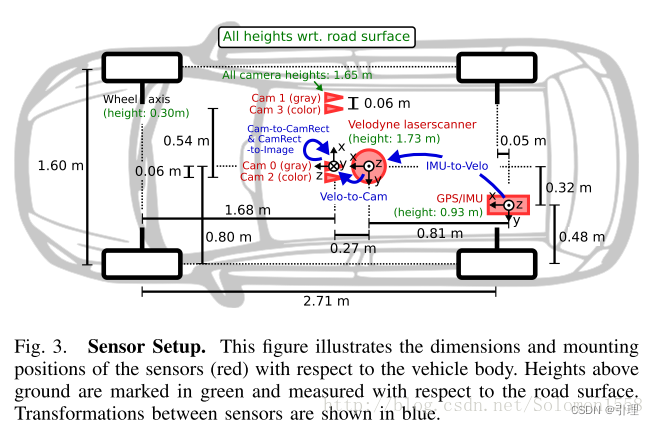
Tr: 4.276802385584e-04 -9.999672484946e-01 -8.084491683471e-03 -1.198459927713e-02 -7.210626507497e-03 8.081198471645e-03 -9.999413164504e-01 -5.403984729748e-02 9.999738645903e-01 4.859485810390e-04 -7.206933692422e-03 -2.921968648686e-01
这里的数据可以分为两组。第一组是P0~P3。第二组是Tr。
先解释P0~P3的符号。
P0代表0号相机 左边灰度相机
P1代表1号相机 右边灰度相机
P2代表2号相机 左边彩色相机
P3代表3号相机 右边彩色相机
可以看到,车上共4个相机。相机编号也是对应着的。
然后解释PX这12个数字的意义。
这里引入一个概念叫做相机投影矩阵。
P
=
(
f
u
0
c
u
−
f
u
b
0
f
v
c
v
0
0
0
1
0
)
P =\begin{pmatrix} f_{u}&0 &c_{u} &-f_{u}b \\ 0& f_{v} &c_{v} &0 \\ 0&0 &1 &0 \end{pmatrix}
P=⎝
⎛fu000fv0cucv1−fub00⎠
⎞
整个P0构成一个3*4的矩阵。(后面几个也一样。)
我们知道,这个34,左边33这部分,是相机的内参矩阵。
K
=
(
f
u
0
c
u
0
f
v
c
v
0
0
1
)
K =\begin{pmatrix} f_{u}&0 &c_{u} \\ 0& f_{v} &c_{v} \\ 0&0 &1 \end{pmatrix}
K=⎝
⎛fu000fv0cucv1⎠
⎞
我们拿P0来说,P0相机的内参矩阵为:
K
=
(
7.188560000000
e
+
02
0
6.071928000000
e
+
02
0
7.188560000000
e
+
02
1.852157000000
e
+
02
0
0
1
)
K =\begin{pmatrix} 7.188560000000e+02&0 &6.071928000000e+02 \\ 0& 7.188560000000e+02 &1.852157000000e+02 \\ 0&0 &1 \end{pmatrix}
K=⎝
⎛7.188560000000e+020007.188560000000e+0206.071928000000e+021.852157000000e+021⎠
⎞
最右边那个1*3的向量,只有1个元素。b的含义是,相对于P0相机的偏移量。所以可以看到,P0的这一项直接为0。
Tr表示将velodyne坐标系转换到P0。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









