







在做点云开发时,rviz是一个必要的调试工具。
不同的话题,订阅到不同的点云。但点云的颜色是一样的,那就会造成无法分清除哪些点云来自哪一部分。
如下图,接受了两个topic。所有点云混为一体。
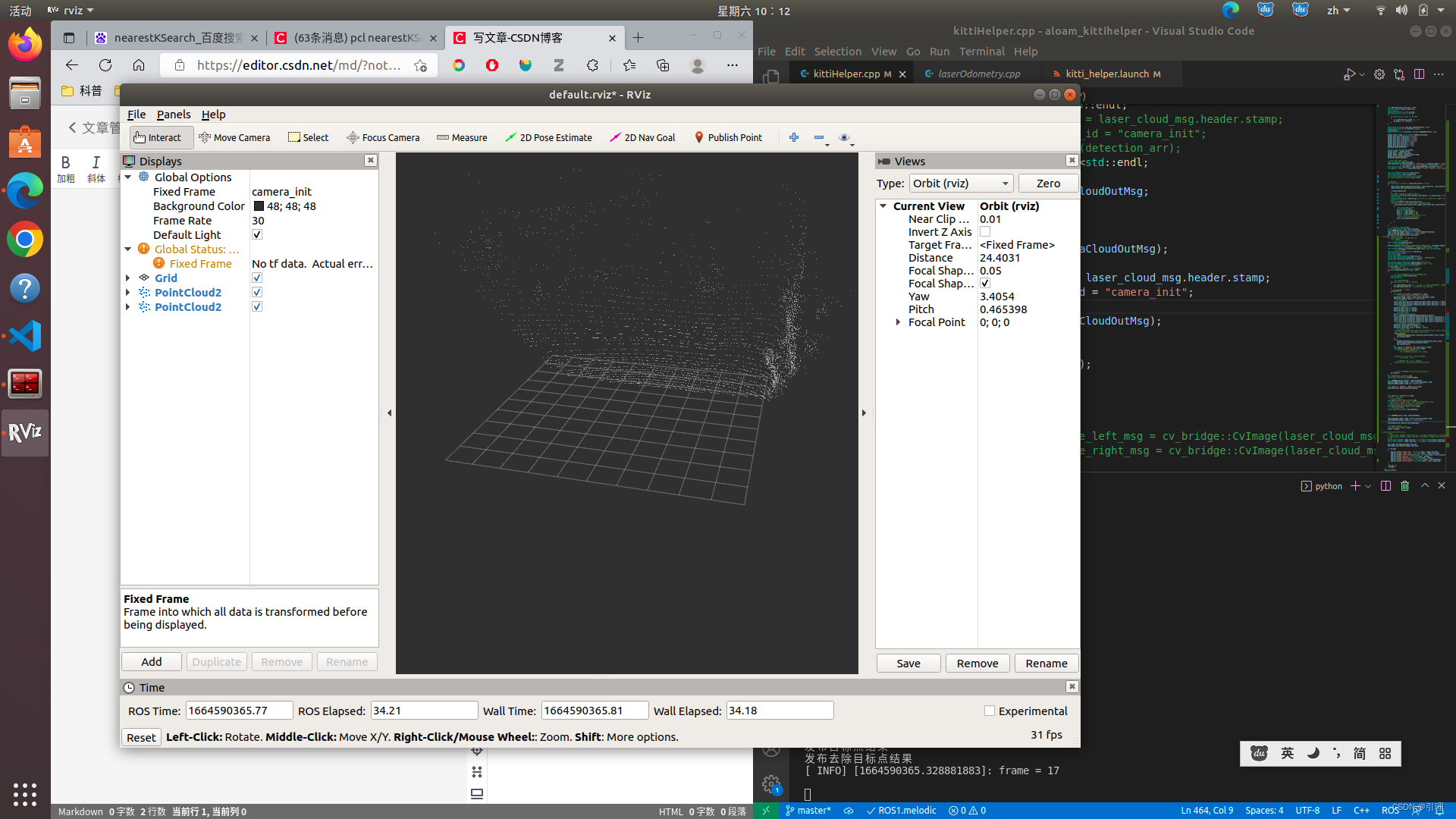
这时候就需要其他手段区分点云,其中一个就是给点云上颜色。
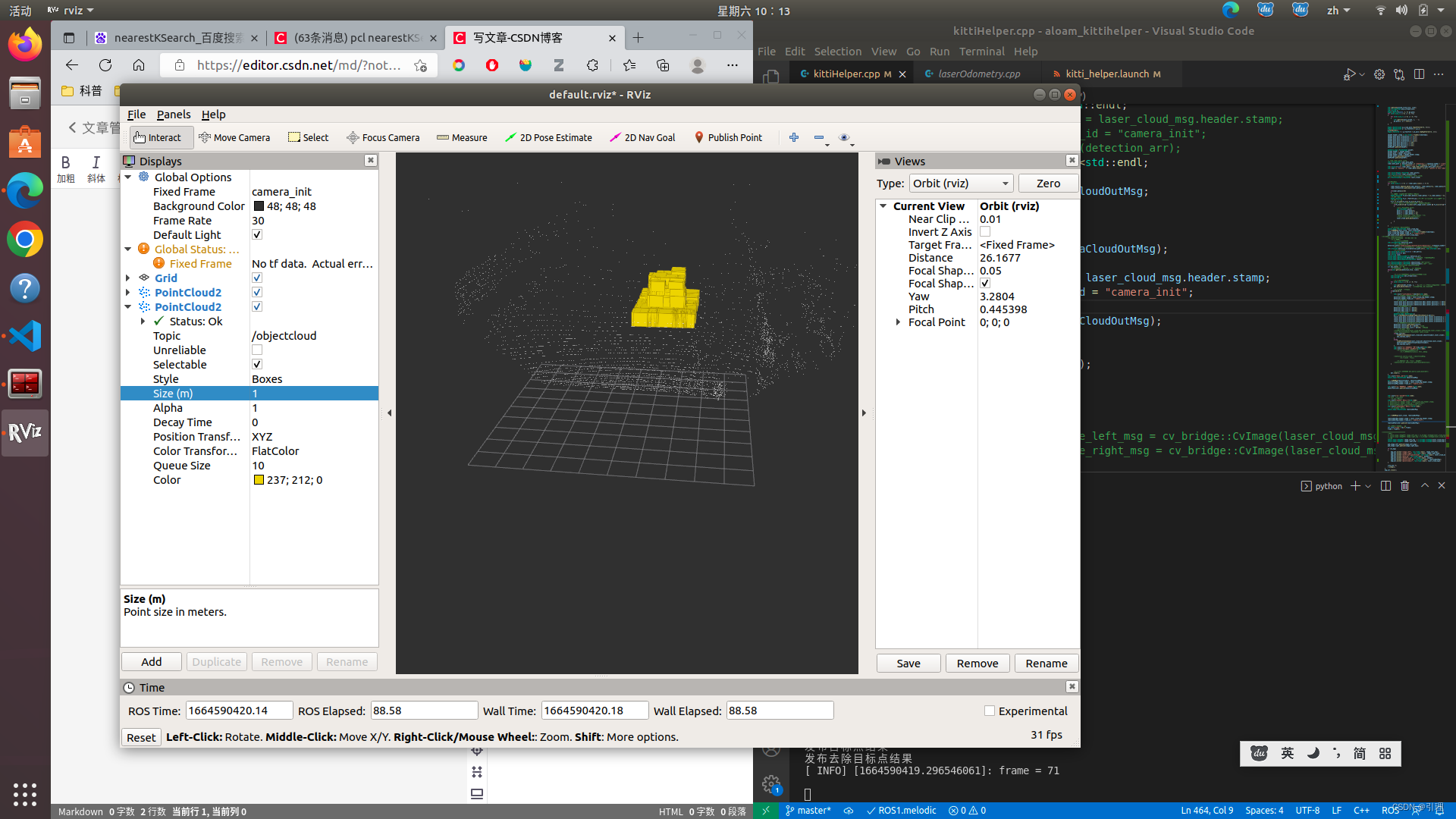
color transfor默认是intensity.修改为flatcolor.
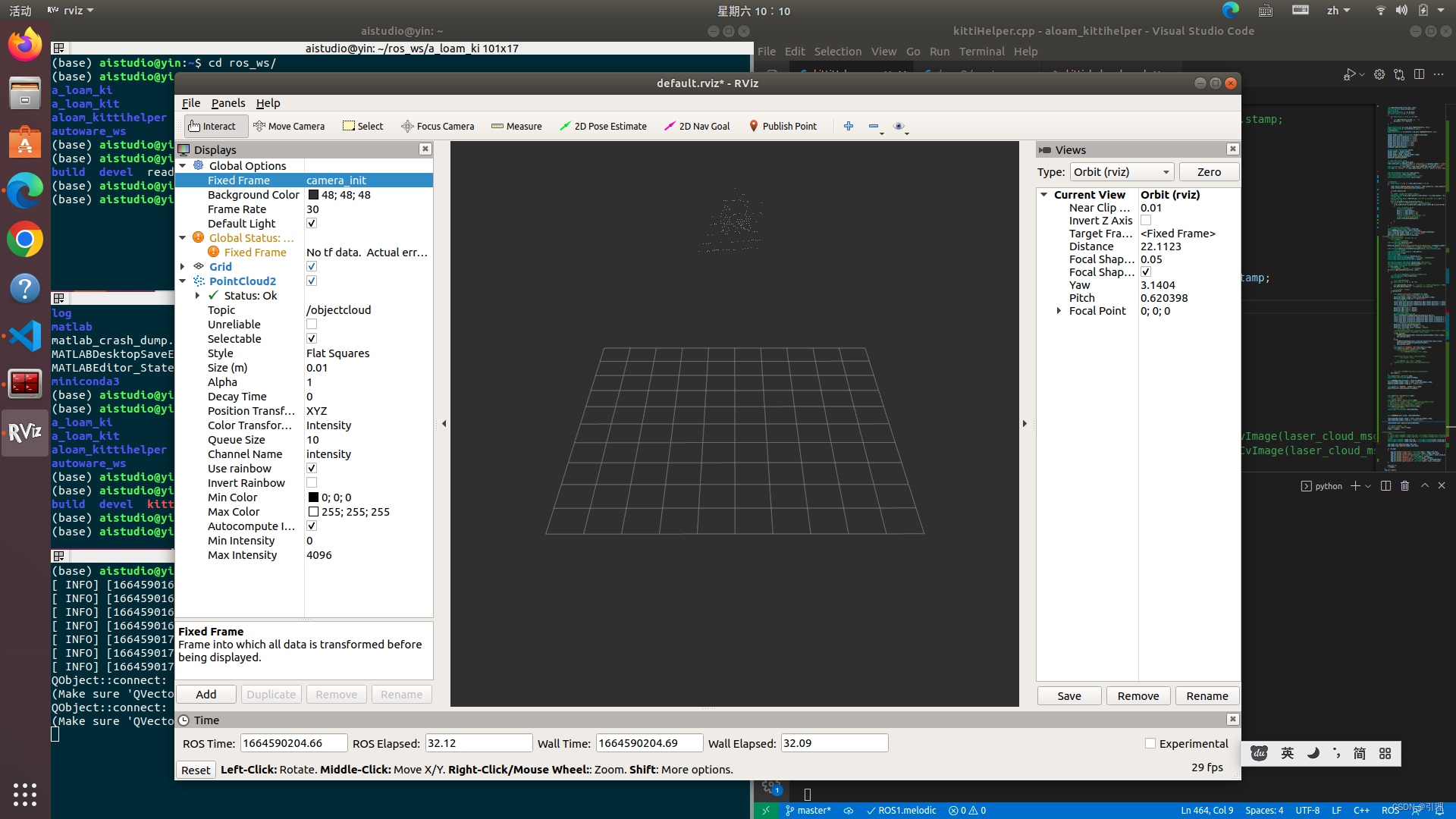
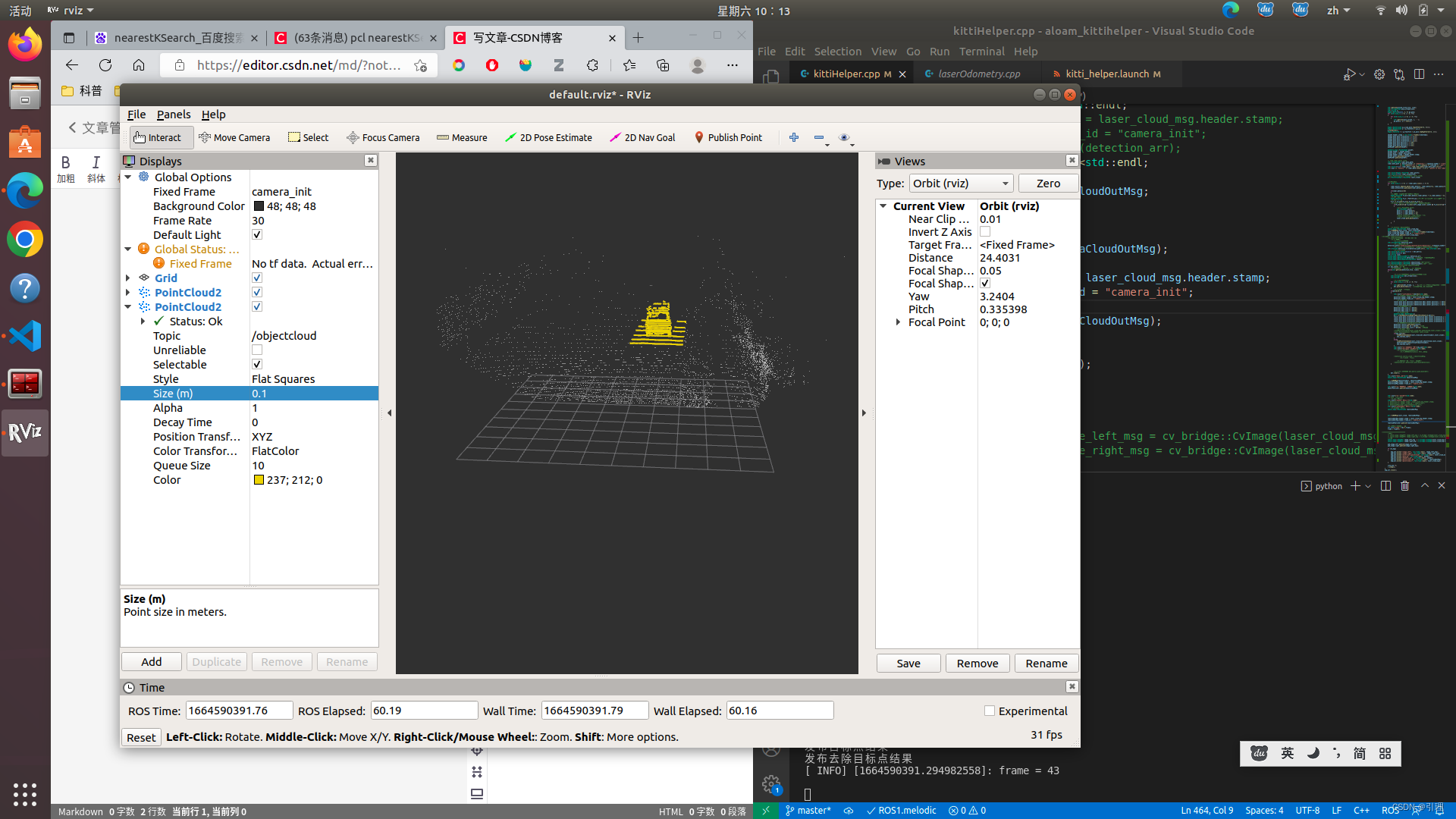
选一个你想要的颜色。

并且调节点云的size大小,太小的话依然不明显。
也可以调节点云的形状
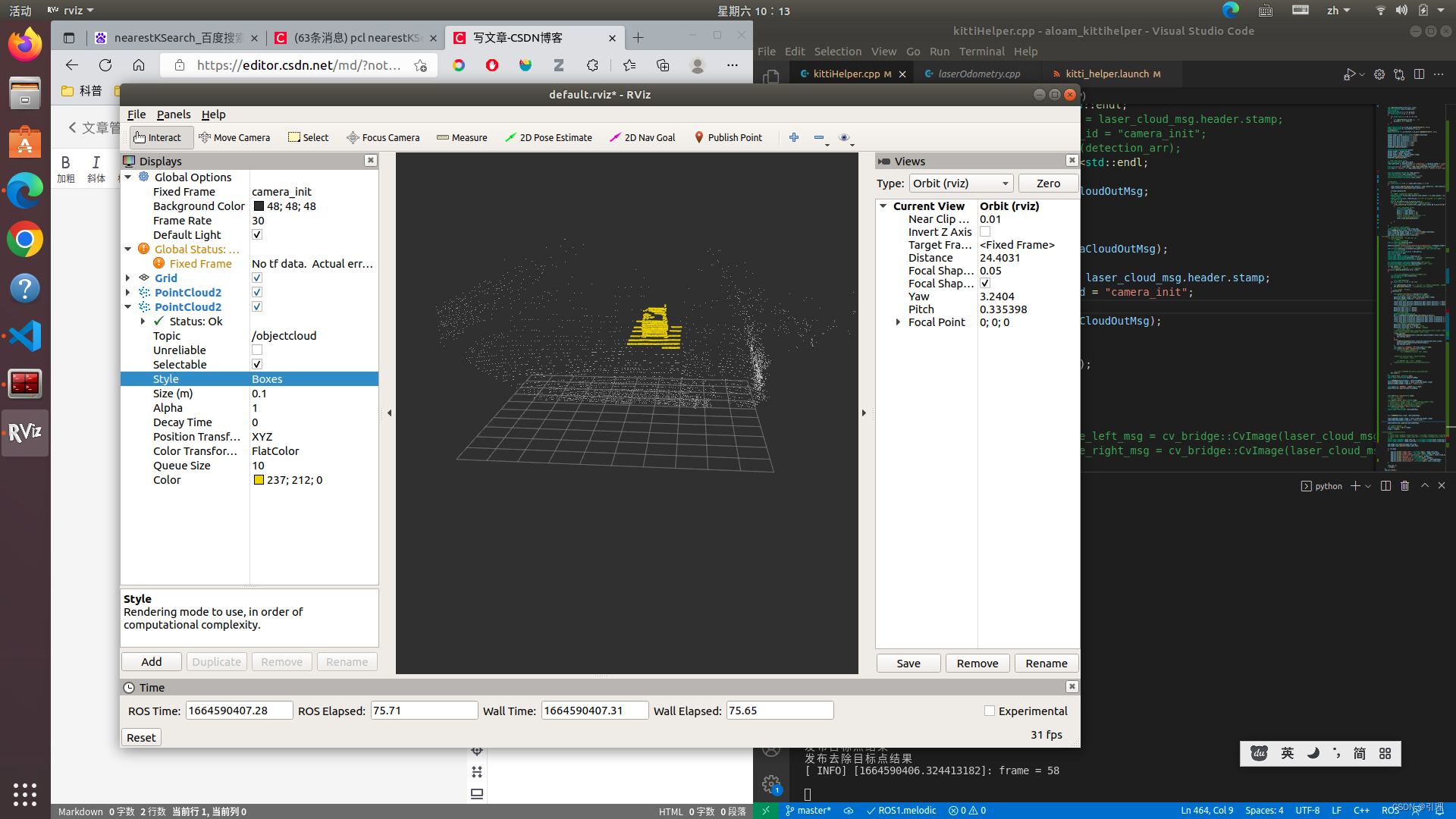
拉大之后更显眼
在做点云开发时,rviz是一个必要的调试工具。
不同的话题,订阅到不同的点云。但点云的颜色是一样的,那就会造成无法分清除哪些点云来自哪一部分。
如下图,接受了两个topic。所有点云混为一体。
这时候就需要其他手段区分点云,其中一个就是给点云上颜色。
color transfor默认是intensity.修改为flatcolor.
选一个你想要的颜色。
并且调节点云的size大小,太小的话依然不明显。
也可以调节点云的形状
拉大之后更显眼

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 1757
1757





