






 本文详细解析了Kitti数据集calib.txt文件中各参数的意义,包括相机内参矩阵、外参矩阵及基线长度计算,提供了一个清晰的理解路径。
本文详细解析了Kitti数据集calib.txt文件中各参数的意义,包括相机内参矩阵、外参矩阵及基线长度计算,提供了一个清晰的理解路径。

在学习视觉SLAM14讲ch13代码部分使用到Kitti数据集,在此对数据集中calib.txt文件各参数含义进行解释
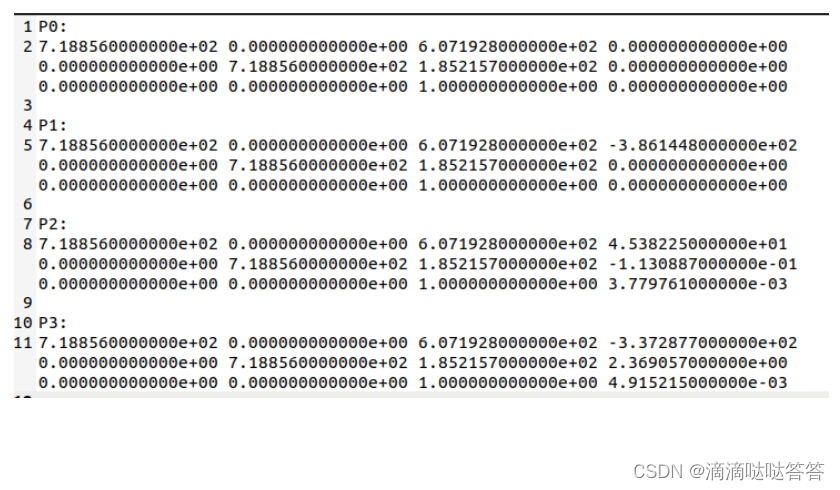
Kitta/data_odometry_gray/dataset/sequences/00/calib.txt文件
其中:
P0代表0号相机 左边灰度相机
P1代表1号相机 右边灰度相机
P2代表2号相机 左边彩色相机
P3代表3号相机 右边彩色相机
接下来解释Pi中12个数字的含义
Pi矩阵是当世界坐标系和参考相机0的坐标系重合时(实际上世界坐标系和 Cam0 坐标系不重合)的投影矩阵,可以理解为相机 i 的内参矩阵 * 相机0相对于相机i的外参矩阵
对于相机1、2、3而言,相机0相对于他们的外参数旋转矩阵为单位矩阵 I ,即:
即有:
根据文件calib.txt文件可得
相机0,1,2,3的内参矩阵为:
下面计算相机0和相机1的外参中的平移向量 t ,由上式可得:
即相机0和相机1的外参中的平移向量 t 为:
即相机0和相机1的基线 b 的长度为:
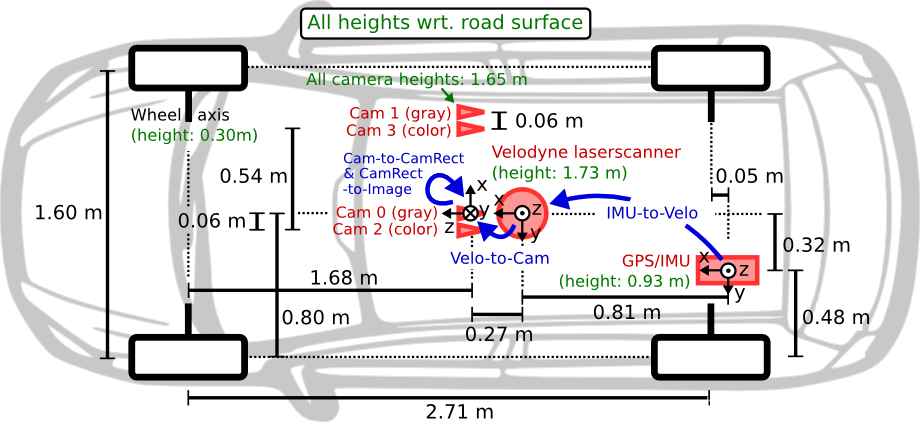
由最上面第二张图片可得,Cam0(gray)和Cam1(gray)的基线长度 b 为0.54米,计算结果准确。
参考:

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









