







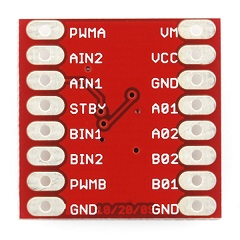
TB6612FNG图片
没错,第一眼看到这个小片片儿心态就崩了,哪来的这么多接口?小小的东西有多大的能耐?多大?大得很,他是一台小车的核心之一。那么接下来就抛开他的原理(因为原理我也不清楚,哈哈)具体的讲一下如何使用这个心脏。
咱们先来讲一下6612上面的接口都是干嘛的
| 名称 | 作用 |
|---|---|
| AINl/AIN2、BIN1/BIN2、PWMA/PWMB | 控制信号输入端 |
| AO1/AO2、BO1/BO2 | 电机控制输出端 |
| STBY | 正常工作/待机状态控制引脚; |
| VM:12V和VCC:5 V | 电机驱动电压输入和逻辑电平输入端 |
| GND | 接地 |
18个口看似多的让人头疼,其实可以分为上面表格的五部分
1.输入端
2.输出端
3.STBY
4.电源
5.接地
接下来咱们在具体分块讲解
输入端
AINl/AIN2、BIN1/BIN2
一般情况下6612控制两个电机,也就是电机A和B,从名字也可以直观的看AIN,BIN是控制A和B的不同接口,就拿A举例子吧,AIN1,AIN2是通过杜邦线接到开发板上的,用来控制电机的正传和反转,如AIN1:1,AIN2:0正转,相应的0,1就是反转,0,0和1,1都是停转,BIN1,2与AIN1,2一样,就是控制的电机不同罢了。
PWMA/PWMB
同样,这个接口也是要接到开发板上的,以此来控制电机。
A\B电机信号输入端,控制A\B电机转速。
输出端
AO1/AO2、BO1/BO2
相对应AINl/AIN2、BIN1/BIN2,有输入就要有输出,你可以理解为AO1就是A电机的1号OUTPUT,AIN1就是A电机的一号INPUT,INPUT与开发板链接,那么OUTPUT就是要和电机连接了啊。
STBY
正常工作/待机状态控制引脚,接3.3V就OK了
*电源
这玩意可要老命了,接错了6612就被烧了
所以千万注意一定要接对
VCC:5V (给开发板供电)
VM :12V(给电机供电)
划重点啊,这可记准了!
GND
这个就不多讲了,接地就对了
模块的接口也就讲完了,再给一个个人小建议,在编码的时候,可以直接把这些个接口的名字当做变量名,这样不管是在编码,代码的可读性,和再具体界限的时候都十分方便,例:
int AIN1=2;
int AIN2=3;
int BIN1=4;
int BIN2=7;
int PWMA =5;
int PWNB=6;
把输入端的名字设置为变量,这样代码虽然会比较难写,但是一目了然!















 4150
4150











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









