






欠驱动无人艇,作为现代海洋科技的杰出代表,以其小型化、多用途、智能化的特质,以及卓越的遥控与自主航行能力,在军事与民用领域均展现出非凡的实用性和战略价值。这种高科技的海洋运载平台,在复杂多变的海洋环境中能够长时间、大范围地执行各种任务,是国家海洋科技实力的重要体现。
本文将详细介绍基于LOS指导的欠驱动无人艇路径跟踪控制。
无人艇的运动学模型与动力学如下
以上符号的定义见文献[1].
首先,LOS 制导方法在欠驱动船舶路径跟踪控制中被广泛应用,是一种对船舶运动和舵手操纵的直观认知。实际的船舶航向若能与 LOS 制导的视线角
对齐,就可以保证船舶的航行路径收敛到提前规划的期望路径。当考虑到欠驱动船舶的控制时,LOS 制导可将船舶的三自由度输出转换为二自由度,即航向和前进速度。因此,欠驱动船舶的路径跟踪控制转换为期望航向
的变化以及航向
和航速
跟踪控制。这种转换方式极大的简化了控制器设计的复杂程度。LOS指导原理如图所示。
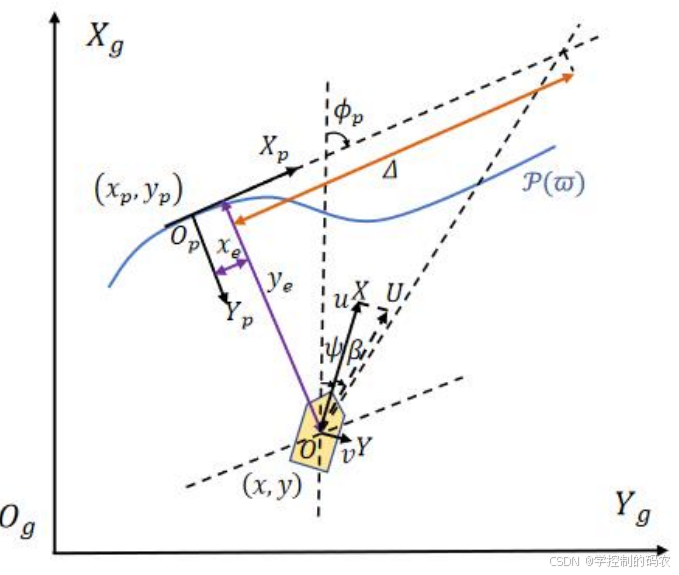
对无人艇定义一条期望参数化路径,
代表与时间无关的路径参数。那么无人艇相对于期望路径的跟踪误差表示如下
其中,,
,
(代表关于路径参数的偏导数)。
考虑到无人艇由于存在横荡方向上的欠驱动特性,使得在面临风浪、水流等外部环境干扰时,容易在横向上产生速度分量,进而引发侧滑角。同时,无人艇的动力学模型虽然能够描述其运动状态,但模型本身的复杂性和外部环境的不确定性可能导致预测和控制上的误差,也是侧滑角产生的原因之一。无人艇产生的侧滑角定义为。在无人艇的实际应用中,时变侧滑角
通常非常小,通常不会超过 5°,且近似满足
,
。
根据以上分析,跟踪误差的一阶导数表示如下
其中,代表无人艇的合成速度,
代表虚拟参考点的速度(可促进跟踪误差的收敛),设计如下
其中,代表路径参数的更新率,设计如下
其中,,
为正常数,代表增益。
根据LOS制导原理,设计如下制导律(参考航向角)如下
,其中
为正常数,代表增益。
接下来根据参考制导律,设计期望艏摇角速度
如下
对于期望纵荡速度设计合理即可。
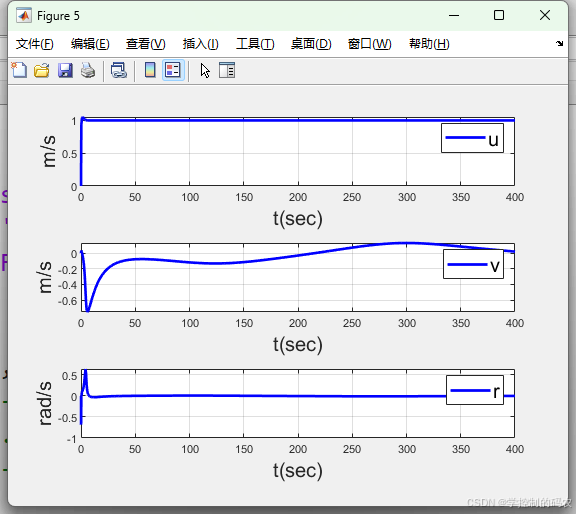
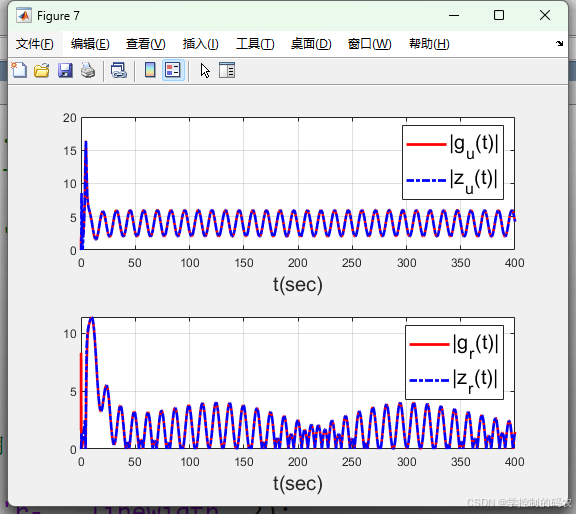
对于动力学层面,设计具有鲁棒特性的滑模控制方案。
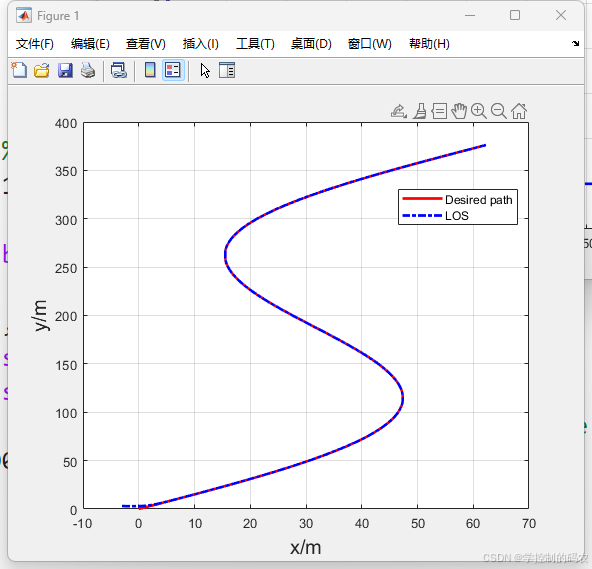
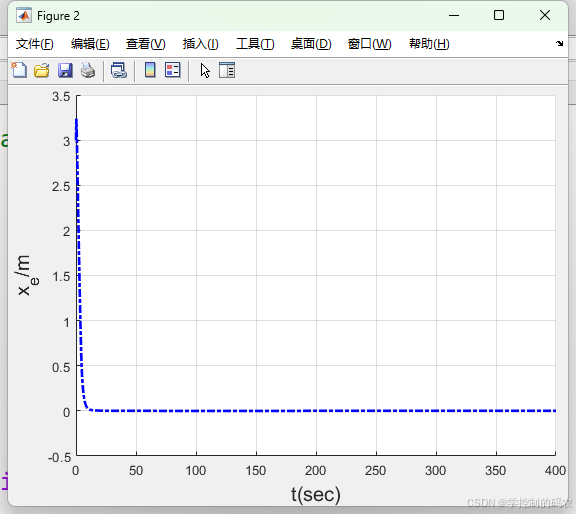
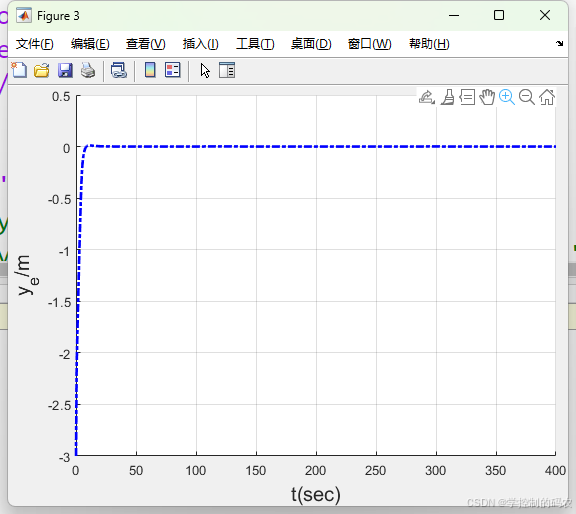
具体的matlab仿真设计效果如下

















 676
676

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









