






1.矢量控制主要特点:
通过矢量变换的方法重构电机数学模型为一台他励直流电动机,在同步旋转的参考轴系内,将交变的定子电流变换为两个直流量,一个为励磁(直轴 id)分量,一个为转矩(交轴 iq)分量,两者在空间上相互垂直,通过对两者进行解耦控制,以实现对电机励磁磁场和电磁转矩的解耦控制。
2.常用的矢量控制策略:
根据电流控制方法主要分为:id=0控制、cosφ=1控制、最大转矩/电流控制(MTPA)、恒磁链控制、弱磁控制等
3.进行坐标变换的原因:
(1)永磁同步电机中,定子磁势Fs、转子磁势Fr、气隙磁势之间的夹角都不是90°,耦合性强,根本无法对磁场和电磁转矩进行独立控制;
(2)直流电机励磁磁场垂直于电枢磁势,两者正交,二者各自独立,互不影响;
(3)直流电机控制策略多种多样,能够使其应对不同场合。主要是将交流电机模拟成直流电机来进行控制。
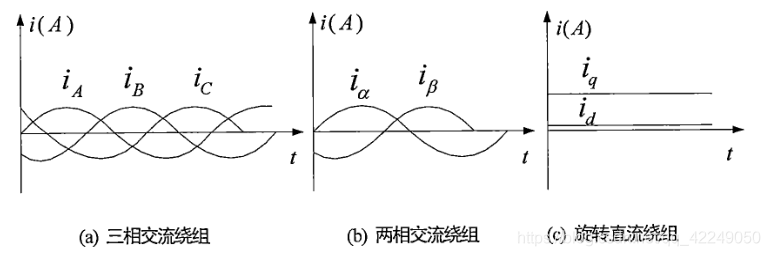
4.矢量控制坐标变换
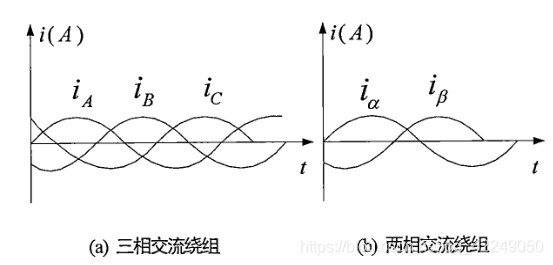
对于正弦波永磁同步电机,通过变换将三相交流绕组等效为旋转的、相互垂直的两相直流绕组,变换后使系统部分解耦。
参与到左边变换的坐标系包括静止坐标系和旋转坐标系。静止坐标系包括:三相ABC静止坐标系、两相αβ静止坐标系,旋转坐标系包括转子dq坐标系和定子旋转坐标系。坐标系变换就是要将ABC三相静止坐标系变换到两相静止坐标系aβ称作Clarke变换,而将aβ变换到两相旋转坐标系dq称作Park变换。
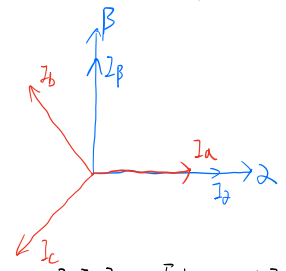
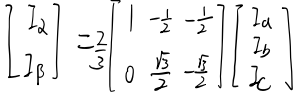
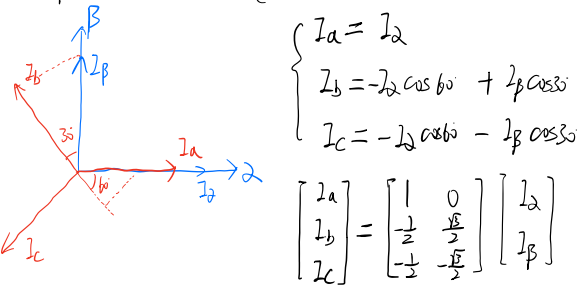
(1)Clark变换
定义两相静止坐标系中的a轴与定子A相绕组重合,β轴逆时针超前a轴90空间电角度。
I也可以用电压U、磁链f进行代替。

在交流调速系统中,有两种等效变换方式:一种是恒功率变换,因变换前后磁动势保持不变,所以变换后功率也不变,需要在变换矩阵外乘以系数k =(2/3)^0.5;另一种是恒幅值变换,变换前后电压、电流的幅值不变,需要在变换矩阵外乘以系数k =2/3;
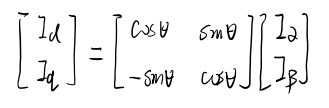
(2)Park变换
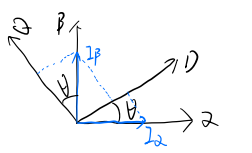
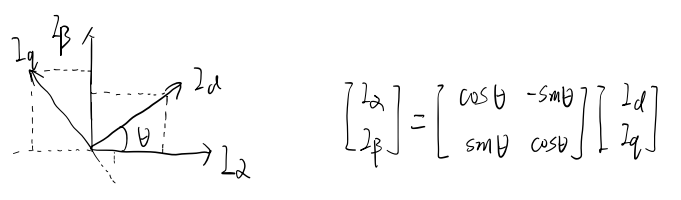
定义一个在空间以同步速旋转的两相坐标系 dq,其中 d 轴与转子磁极轴线重合,q 轴逆时针超前 d 轴 90° 空间电角度,d 轴与 A 相定子绕组的夹角为 θ(电角度)。
(3)反Clark变换
将两相静止坐标系转换到三相静止坐标系中
(4)反Park变换
将两相垂直旋转坐标系转换到两相静止坐标系中















 657
657











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









