







 本文详细介绍了永磁同步电机矢量控制中电流环和速度环PI参数的整定方法,包括id=0控制和最大转矩电流比(MTPA),以及如何通过前馈解耦策略实现电流控制器的独立控制。通过Simulink仿真实验展示了电流环跟踪和转速环响应的良好效果。
本文详细介绍了永磁同步电机矢量控制中电流环和速度环PI参数的整定方法,包括id=0控制和最大转矩电流比(MTPA),以及如何通过前馈解耦策略实现电流控制器的独立控制。通过Simulink仿真实验展示了电流环跟踪和转速环响应的良好效果。
前面几节的内容中对FOC框架中的主要模块进行了讲解,接下来这一节将对矢量控制中电流环PI参数、速度环PI参数整定进行讲解。
在重新解释一下矢量控制的基本思想,是在普通的三相交流电动机上设法模拟直流电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分解成为产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使得两个分量互相垂直彼此独立,然后分别进行调节。
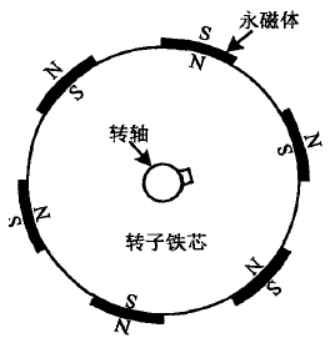
传统矢量控制常用方法包括id=0控制和最大转矩电流比(MTPA)控制,对于表贴式PMSM,两种方法都是等效的,对于内置式三相PMSM,主要用MTPA。
![]()
图像分别为表贴式和内置式,内置式由于永磁体埋入转子中,d轴气隙更大,磁阻也更大,导致直轴电感Ld小于交轴Lq,表贴式由于气隙更加均匀,交直轴电感相同。
1.仿真模型搭建
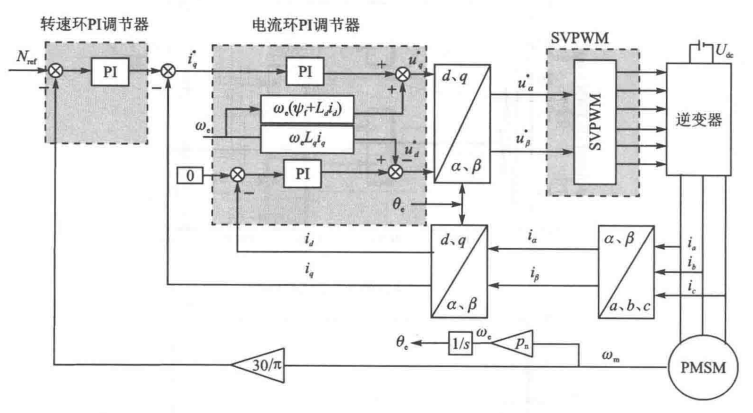
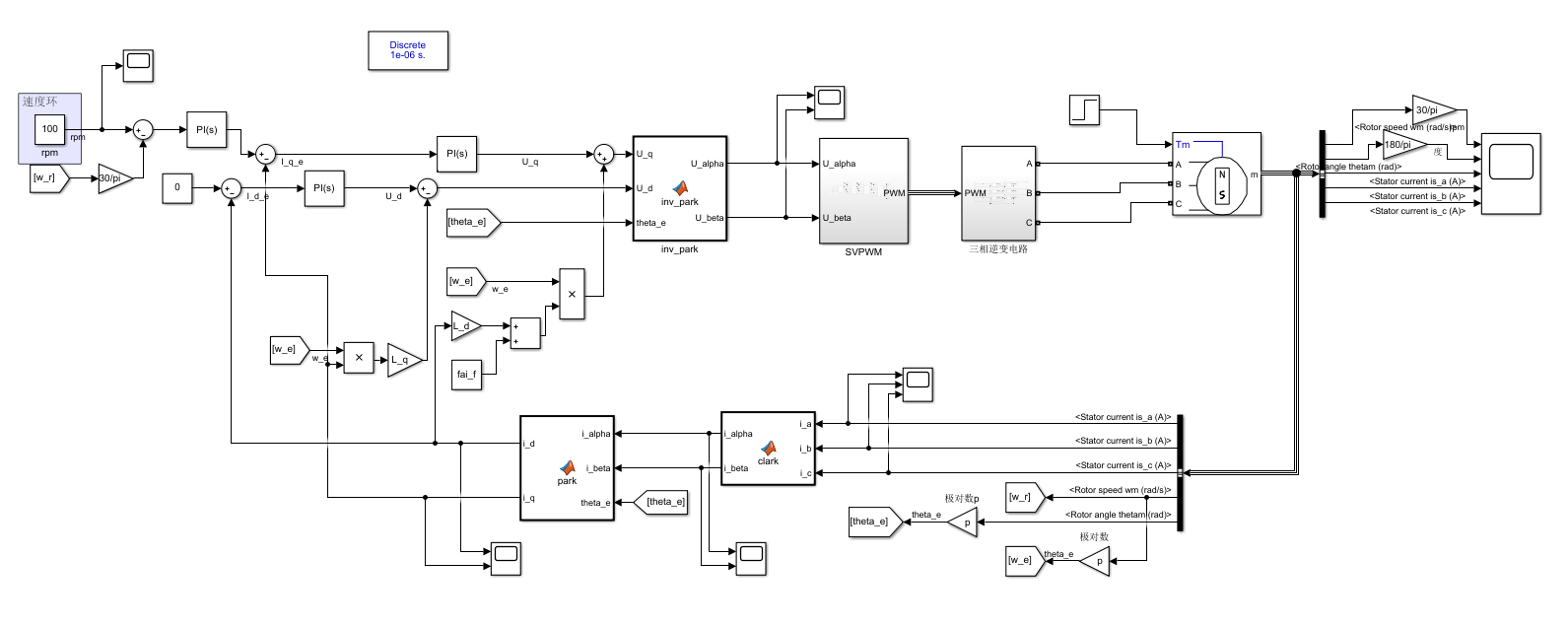
下图是采用id=0控制方法的三相PMSM双闭环矢量控制框图,从图中可以看出三相PMSM矢量控制主要包括3个部分:转速环PI调节器、电流环PI调节器和SVPWM模块。按照该框图搭建Simulink仿真模型。
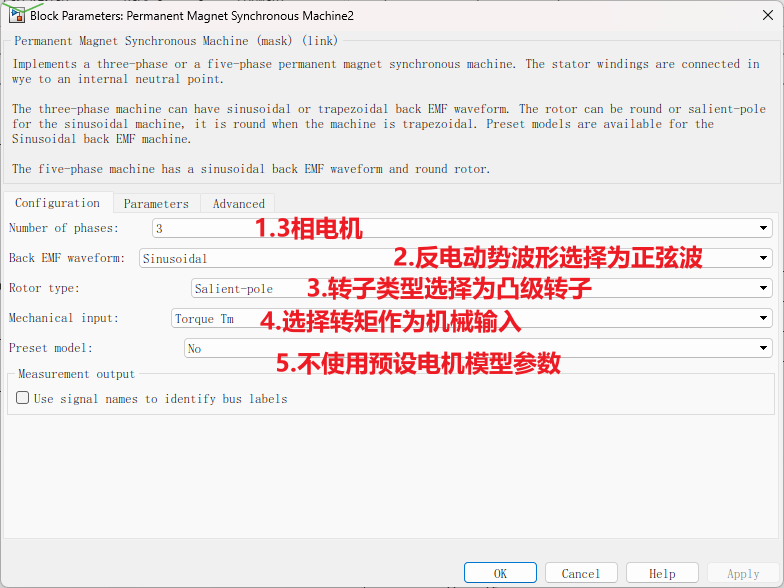
坐标变化和SVPWM模块在《五、永磁同步电机矢量控制(FOC)—坐标变换及SVPWM Simulink仿真》中已经讲解,在这里主要讲解一下电机模型的选择,选择“Permanent Magnet Synchronous Machine”永磁同步电机模块
首先进入“configuration”初始化界面进行设置:
其次进入“Parameters”参数设置界面:
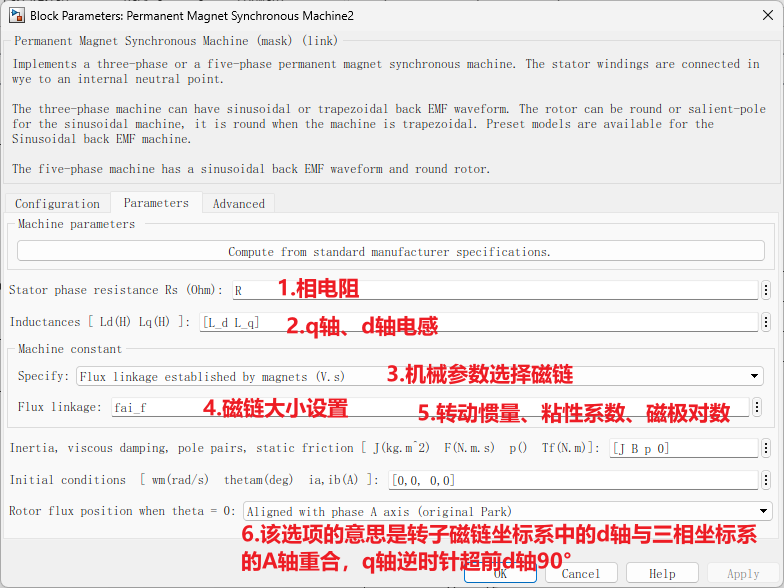
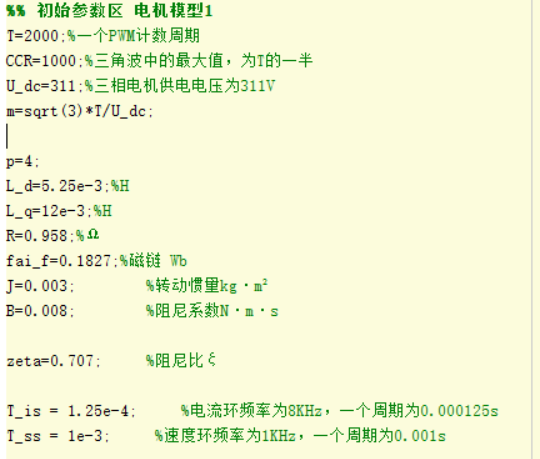
模型参数设置如下,见demo02_Initfun.m文件,这些参数根据实际永磁同步电机参数获取:
将各模块建立完毕后,根据矢量控制框架将各模块搭积木组合。注意电机模型输出的转速和转角分别是rad/s和rad,输出转角为机械角度,电角度=磁电机对数p*机械角度。转速参考值单位为rpm,输出转角*30/π后单位就变成rpm,在与参考值进行比较。
模型位置,下文用到的模型都在该链接中,点击下载。首先运行demo02_Initfun文件,初始化部分变量参数,再运行Simulink文件。
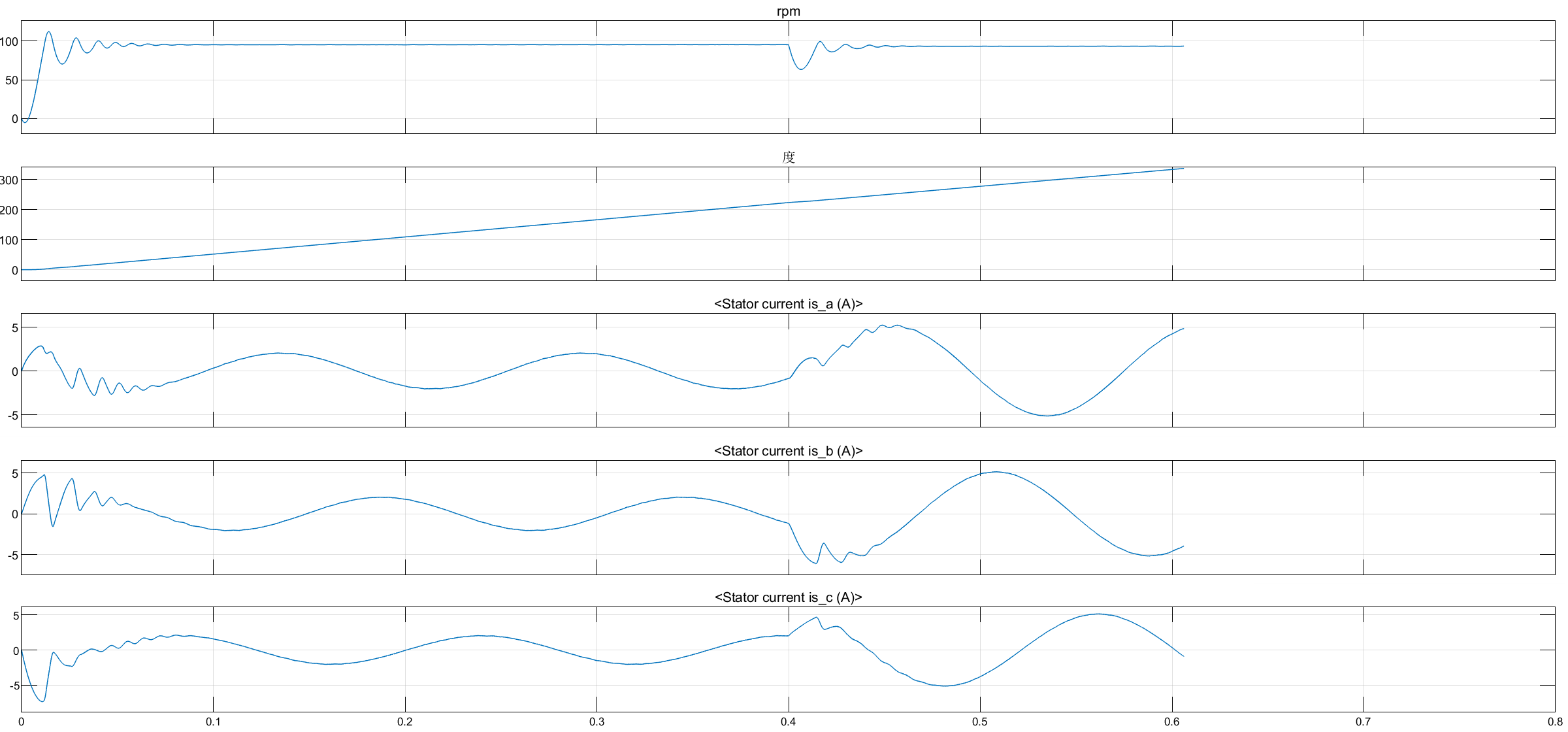
该仿真模型是在FOC控制的基础上加入的前馈解耦环节,在接下来的讲解中,将进一步解释为什么要加入前馈解耦。由于模型PI参数没有调整合理,导致转速环还存在一定稳态误差无法被消除,接下来将进一步讲解转速环和电流环的PI参数整定方法。
2.电流内环调节器设计
闭环系统中电流环属于内环,作用是使电机电流跟随参考电流变化,对系统响应速度和准确性有重要影响。闭环控制系统设计顺序是先内环后外环,电流内环性能效果影响整个系统性能。本小节的工作是根据永磁同步电机在dq坐标系下的数学模型,忽略交直轴耦合和反电动势影响,设计电流环PI控制器。
dq坐标系下PMSM的数学模型如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 421
421

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









