







1.引言
2. 三相感应电机ABC相坐标数学模型
3. 三相感应电动机起动过程仿真
4. 总结
5. 参考文献
1.引言
电机的数学模型对于电机的设计、控制和性能分析至关重要。通过数学模型,可以预测电机在不同工作条件下的性能,如转矩、效率和功率因数等;有助于设计更高效、更可靠和成本效益更高的电机;是开发电机控制策略的基础,如矢量控制和直接转矩控制;可以帮助识别电机在运行中可能出现的问题,并进行故障诊断;是电机学教学和研究的重要工具,有助于学生和研究人员理解电机的工作原理。
建立电机的数学模型首先需要考虑电机的具体结构,包括绕组的布置、磁路的设计等,然后考虑数学模型的精度要求,即考虑模型的用途和应用场景。不同的应用可能对精度有不同的要求。例如,如果数学模型用于控制算法的开发,通常要求模型能够准确描述电机的转矩、速度和电流响应,需要较高的精度以确保控制性能;而如果模型仅用于初步设计或教学,精度要求可能较低。在实际工程中,通常是按简化的理想电机的假设条件建立数学模型,然后按照精度要求加以补充修正,把非线性特性和温度效应等因素考虑进去。对更高精度要求的数学模型,可以用电磁场分析方法和场路结合的分析方法等来建立。
三相感应电机的ABC相坐标数学模型,可以通过坐标变换将电流、电压和磁链等物理量转换为两个正交的直轴(d轴)和交轴(q轴)分量。这种转换有助于简化控制算法,因为电机的转矩和磁通可以分别与d轴和q轴分量关联。
本文首先建立“理想电机”假设条件下的单笼式三相感应电机的数学模型,然后,根据所建立的数学模型,用Matlab编写程序代码对三相感应电动机的起动过程进行仿真分析。
2. 三相感应电机ABC相坐标数学模型
设三相感应电机转子绕组为绕线式对称三相绕组(笼型转子为等效三相对称绕组)。相坐标系的特点是,定子的坐标系固定于定子,转子的坐标系固定于转子。图1(a)为三相感应电机的物理模型,图中定子三相分布绕组等效为三相集中绕组,分别用A、B、C表示;转子三相分布绕组等效为三相集中绕组,分别用a、b、c表示;转子a相轴线与定子A相轴线的夹角为,
为转子电角速度。图1(a)中各物理量的正方向按电动机惯例规定,如图1(b)所示。
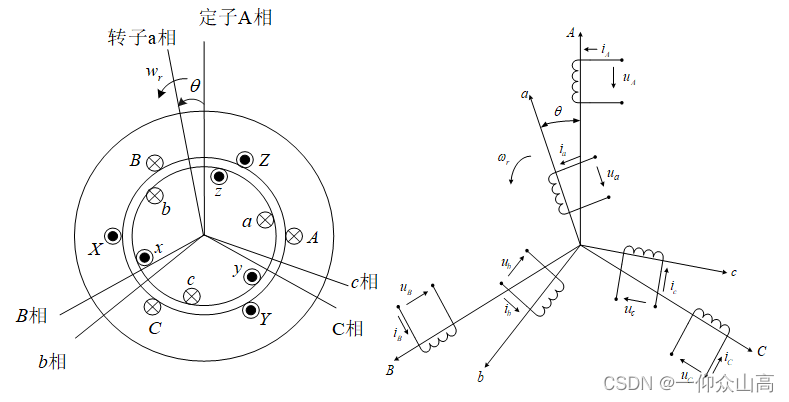 (a)物理模型 (b)正方向规定
(a)物理模型 (b)正方向规定
图1. 单笼式三相感应电机物理模型及正方向规定
三相感应电机数学建模的假设条件:
(1)电机的磁路为线性,即不考虑磁路中的剩磁、饱和、磁滞和涡流效应。
(2)不考虑电机绕组的集肤效应和温度效应。
(3)气隙磁通密度在空间按正弦分布。
(4)设电机定、转子表面是光滑的,齿和槽的影响用卡氏系数来记及;电机结构对直轴和交轴都是对称的。
(1). 定子电压方程
按图1(b)中电压、电流的正方向,根据基尔霍夫电压定律列出定子三相绕组的电压方程:
(1)
式中,
分别为定子A相绕组,B相绕组和C相绕组的端电压;
分别为定子A相绕组,B相绕组和C相绕组的相电流;
分别为为定子A相绕组,B相绕组和C相绕组磁链;
为定子各相绕组电阻。
(2)转子电压方程
(2)
式中,
分别为等效转子a相、b相和c相绕组端电压;
分别为等效转子a相、b相和c相绕组的电流;
分别为等效转子a相、b相和c相绕组的磁链;
为转子各相绕组电阻。
(3)磁链方程
由于假设磁路为线性,故可以应用叠加定理。这样每个绕组的磁链是它本身的自感磁链和其它绕组对它的互感磁链之和,设电流、磁链的正方向符合右手螺旋定则,因此6个绕组的磁链可表达为
(3)
式中,
为绕组的自感;
为绕组的互感。
以A相磁链为例,
由于一相绕组的磁通为主磁通和漏磁通之和,与之对应的自感应为与主磁通对应的主电感与与漏磁通对应的漏电感之和。设定子漏磁通所对应的电感为,转子漏磁通所对应的电感为
,如果用
表示与主磁通对应的定子电感,
表示与主磁通对应的转子电感。由于互感磁通都是通过气隙,气隙均匀时磁阻相同,故有
,则定、转子的自感分别为
定子绕组自感
转子绕组自感
定子绕组互感
由于定子A、B、C三相绕组在空间相差120°电角度,所以定子互感为
转子绕组互感
同理,转子a、b、c三相绕组的互感为
定、转子绕组之间互感
由于转子的运动,定、转子之间的位置是变化的,所以,定、转子绕组之间的互感为转子角位移的函数,再由于气隙磁场设为正弦分布,设
为定、转子两个绕组的轴线重合时互感的幅值,则有
设定子绕组每相有效匝数为,转子绕组每相有效匝数为
,磁路的磁导为
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1495
1495

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









