






目录
1 PID控制器简介
2 永磁直流电动机PID控制系统的PID参数整定(试凑法)
3 参考资料
一.PID控制器简介
PID控制在工业领域的应用非常广泛。工业自动化领域约95%的闭环系统使用PID控制器。 PID控制器算法简单,易于实现和调试,不需要复杂的数学模型;PID控制器适用于各种类型的电机控制系统,并且对于许多应用场景具有良好的性能;在合适的参数设置下,PID控制器可以实现系统稳定运行,并且对于系统参数变化具有一定的鲁棒性。
在电机控制系统中,PID控制器常被用于以下几个方面:
1. 速度控制:通过对电机速度进行闭环控制,可以使电机在特定速度下稳定运行。PID控制器根据电机实际速度与期望速度之间的误差来调节输出,使得误差趋于零,从而实现速度的精确控制。
2. 位置控制:在需要精确控制电机位置的应用中,PID控制器可以根据电机实际位置与目标位置之间的偏差来调节输出,使得电机按照预定轨迹或位置移动,例如机器人臂的运动控制、CNC机床的位置控制等。
3. 转矩控制:对于需要对电机输出转矩进行控制的系统,PID控制器也可以被应用。通过控制电机的电流或电压,可以实现对电机输出转矩的精确控制,例如在电动车的驱动系统中。
尽管PID控制器在很多场景下表现优秀,但在某些特定的应用中,由于系统过于复杂或高度非线性也可能存在性能不足或者需要更高级的控制算法来解决特定问题。因此,在实际应用中,有时会结合其他高级的控制算法,如模糊控制、神经网络控制、模型预测控制等,以满足更复杂的控制需求。
PID控制器是一种线性控制器,PID算法是一种经典的控制算法,由比例(Proportional)单元、积分(Integral)单元、微分(Derivative)单元三个部分组成。比例(P):根据当前误差,将误差值与一个正比例常数相乘,得到控制器的输出。比例控制考虑当前误差,但无法消除稳态误差。积分(I):累积过去的误差,以消除稳态误差。积分控制器对历史累计误差进行补偿。微分(D):根据误差的变化率来预测未来的误差。微分控制器有助于控制系统的响应速度和抑制振荡。通过调节这三个单元的系数,可以实现对系统的稳定性、响应速度和抗干扰能力等性能进行调节。
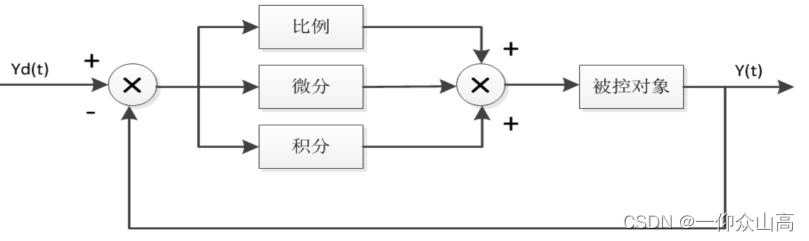
图1. PID控制原理图
整定PID参数的方法通常有:1.经验试凑法;2.Ziegler-Nichols 方法;3.衰减法(Relay Feedback);4.频域方法;5.智能优化方法;6.自适应控制方法等。在实际应用中,通常会结合多种方法,根据具体的系统要求和性能指标来选择合适的PID参数整定方法。下面我们对其中几种方法简要介绍并用Matlab仿真加以实现。
二. 永磁直流电动机单闭环PID控制系统的PID参数整定
在设计PID控制器之前,我们首先要搞清楚体现控制系统性能的几个主要指标以及PID控制器参数(Kp,Ki和Kd)对这几个性能指标的影响:
上升时间(Rise Time)
上升时间是指系统输出从其起始值上升到最终稳态值的一定百分比(通常是90%)所需的时间。Kp的增加会减少上升时间,因为系统对误差的反应更加迅速。然而,如果Kp过大,可能会导致系统响应过快,引起振荡。
超调量(Overshoot)
超调量是指系统响应超过期望稳态值的最大偏差。增加Kp会增加超调量,因为系统对误差的反应过于强烈。Kd的适当增加可以减少超调量,因为它提供了对误差变化率的反馈,有助于平滑系统响应。
沉降时间(Settling Time)
沉降时间是指系统输出达到并保持在稳态值一定范围内所需的时间。Kp和Kd的增加通常会减少沉降时间,因为它们增强了系统对误差的快速响应。然而,过高的Kp或Kd可能导致系统不稳定。Ki对沉降时间的影响取决于系统的类型和Ki的设置,适当的Ki可以加速达到稳态,但过高的Ki可能导致振荡。
稳态误差(Steady-State Error)
稳态误差是指系统达到稳态后输出与期望值之间的偏差。Kp对稳态误差没有直接影响,因为比例控制不能消除稳态误差。Ki的作用是消除稳态误差,但需要时间积累。Kd对稳态误差没有直接影响,但在某些情况下,如系统存在延迟,Kd可以帮助减少由于延迟引起的稳态误差。
在实际应用中,PID参数的调整需要根据系统的具体特性和控制目标进行细致的调整,通常通过实验和仿真来优化参数,以达到最佳的控制效果。
1.“ 试凑法”整定PID参数
“试凑法”是一种基于设计者经验和直觉的方法,通过不断调整PID参数,观察系统响应,来实现系统的稳定和性能要求。
永磁直流电动机参数:

系统设计标准:沉降时间小于2秒;超调小于5%;稳态误差小于1%。
建立永磁直流电动机PID控制系统的Simulink仿真模型如图2所示。
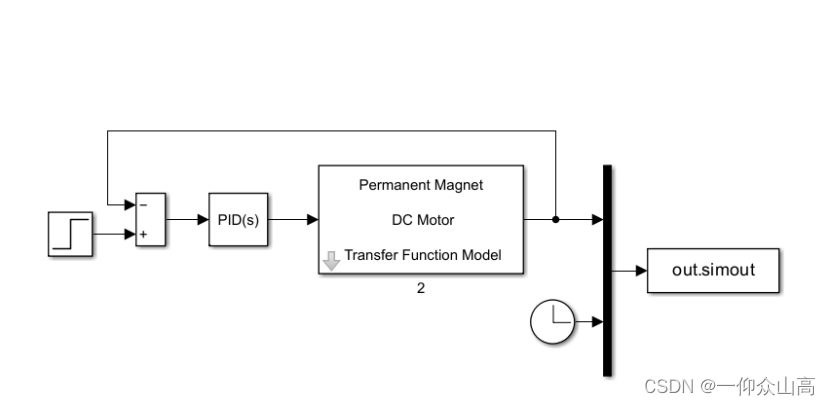
图2. 永磁直流电动机PID调速系统仿真模型
首先,求取系统的开环单位阶跃响应,如图3所示。
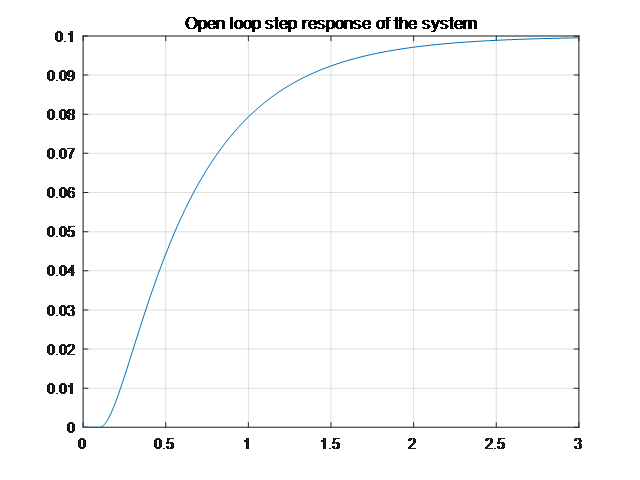
图3.系统开环的单位阶跃响应
从图3可见,在单位阶跃信号作用下,该系统大概经过3秒达到稳态值,没有超调量,稳态值约为0.099,稳态误差约为90%。
比例控制调节(P调节): 首先根据系统的开环响应曲线,观察上升时间,超调量和稳态误差等,试探性地给出一组比例增益Kp,然后进行仿真,根据仿真结果观察调节效果,再进行取舍,这个过程可能要进行多次。
考虑到稳态值离所要求的数值相差很,远比例增益Kp可以选较大的数值,这里取Kp=[50 100 150],当然,你也可以延长数组的长度,例如取Kp=[30 80 120 160]。编写Matlab程序对图2的仿真模型进行仿真,matlab代码如下:
clear all
close all
clc
load_system('pmdcm_PID_control');
Ra = 1;
La = 0.5;
J = 0.01;
Bm = 0.1;
Kt = 0.01;
Ke = 0.01;
%PID Parameters
Kp = [50 100 150];
Ki = 0;
Kd = 0;
colors=['r','b','g'];
set_param(['pmdcm_PID_control/PID Controller'],'I', num2str(Ki));
set_param(['pmdcm_PID_control/PID Controller'],'D', num2str(Kd));
for i = 1:length(Kp)
set_param(['pmdcm_PID_control/PID Controller'],'P', num2str(Kp(i)));
simOut = sim('pmdcm_PID_control');
t = simOut.tout;
Wr = simOut.simout(:, 1);
plot(t, Wr,colors(i),'LineWidth',1.5);
end
hold off;仿真结果如图4所示。
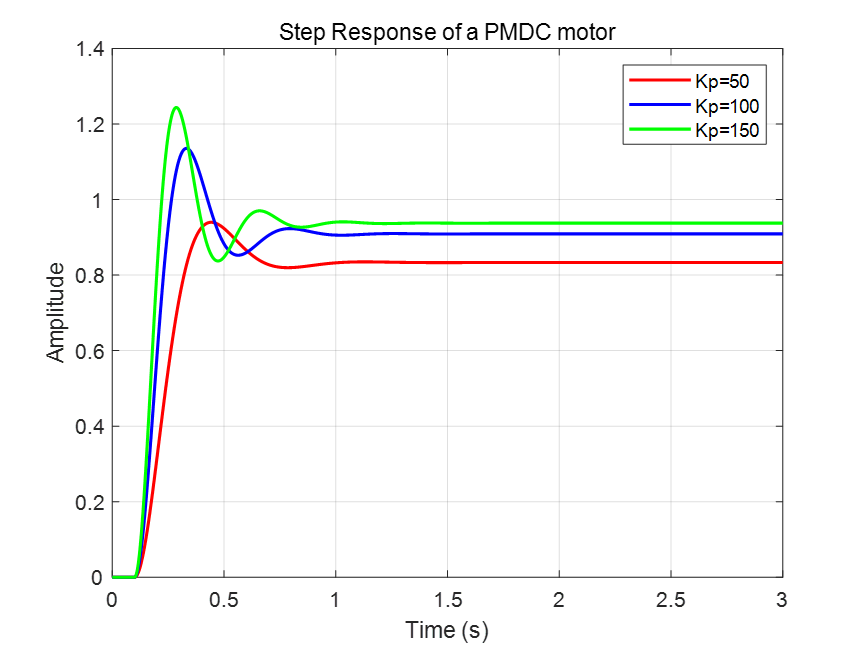
图4 Kp=[50 100 150]时永磁直流电动机P控制系统的单位阶跃响应
从图4看出,Kp=150时,系统的超调为24.1%,稳态值为0.937;Kp=100时,超调为11.4%,稳态值为0.909;Kp=50时,无超调,稳态值为0.833。综合考虑,取Kp=100。
取定Kp值后,分别对积分增益Ki和微分增益Kd进行试凑,你也可以尝试同时对Ki和Kd进行试凑。这里,我们采用前者。
比例-积分控制调节(PI调节):取Kp=100,Ki=[100 200 300],仿真结果(仿真程序只需稍加修改)如图5所示。
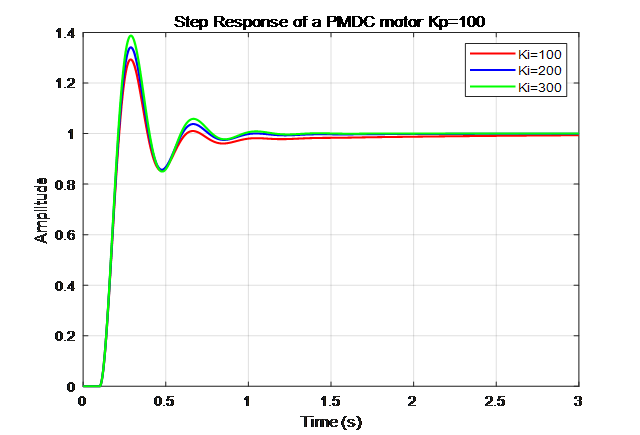
图5. Kp=100,Ki=[100 200 300]时永磁直流电动机P控制系统的单位阶跃响应
从图5的响应曲线上看,超调都过大,还有一些震荡,上升时间有所减少,稳态误差大大减少了。Ki数值越大,则超调越大,震荡越大。要消除过大的超调,我们可以借助于微分调节。
比例-积分-微分控制调节(PID调节):通过观察图4和图5,取Kp=100,Ki=200,为了消除过大的超调量,我们试探性地取Kd=[5 10 20],然后进行仿真,仿真结果如图6所示。
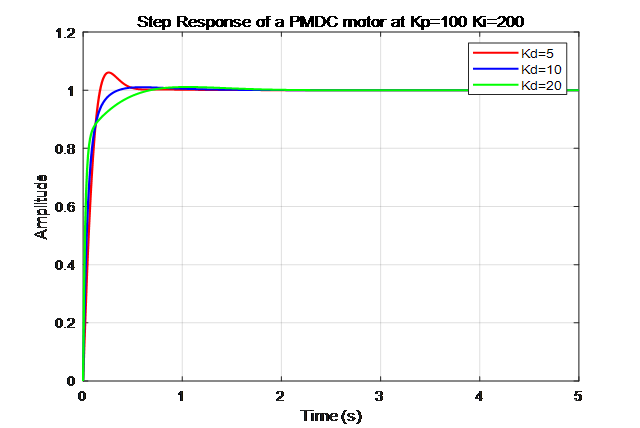
图6. Kp=100,Ki=200,Kd=[5 10 20]时永磁直流电动机PID控制系统的单位阶跃响应
从图6可以看出,Kp=100,Ki=200时,取Kd=10和Kd=20,都满足了设计要求。但是,Kp=100,Ki=200时,Kd=10的响应曲线较为平滑。最终,我们取PID控制器的参数为Kp=100,Ki=200,Kd=10。注意:这组参数一般不是最优的,但是可以以其为基数进行优化或模糊控制。
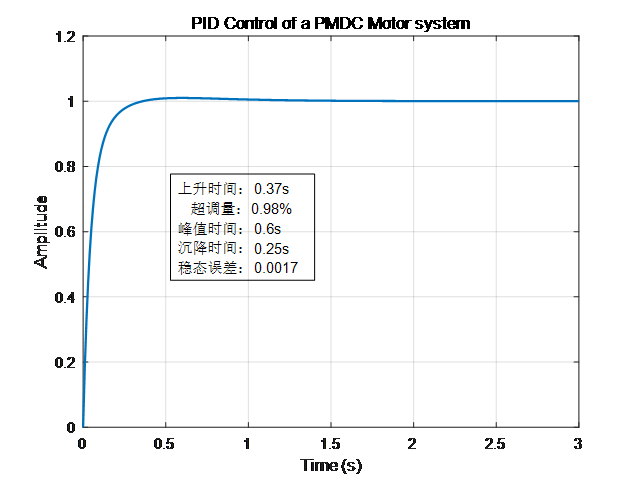
下面给出Kp=100,Ki=200,Kd=10时下面给出永磁直流电动机PID控制系统的单位阶跃响应特性,如图7所示。
总结:
试凑法的应用要点:
1.初始设定:首先为PID控制器设置一个初始参数,通常从比例控制开始,即先设定一个较小的Kp值,Ki和Kd初始设为0。
2.比例控制:调整Kp直到系统响应开始显示出一些振荡或过调现象。
3.积分控制:加入Ki并逐渐增加其值,直到系统能够消除稳态误差。注意,Ki的增加可能会导致系统响应变慢或产生振荡。
4.微分控制:最后引入Kd,开始时设置一个较小的值,然后逐渐增加,直到系统响应显示出最小的超调和振荡。Kd的加入可以帮助预测误差趋势,减少系统超调。
5.逐步调整:在整个过程中,需要逐步调整Kp、Ki和Kd的值,每次调整后都要观察系统响应,并记录下性能指标的变化。
试凑法是一种简单、直观的PID参数整定方法,适用于对系统动态特性有一定了解的操作者。然而,它有很大的局限性,如依赖个人经验、可能需要较长时间来找到最优参数等。在一些复杂或关键的控制系统中,可能需要更精确的参数整定方法,如Ziegler-Nichols方法以及智能优化方法。
参考资料:
1. MatlabR2008控制系统动态仿真实例教程. 谢仕宏 编著















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









