







目录
文章目录

1.飞控固件PX4与QGC地面站
1.1 PX4固件的官网介绍和固件
PX4固件的官网介绍网址:https://px4.io/

[!NOTE]
特别跟踪学习,PX4固件源码位置、PX4使用者手册、PX4开发者手册。
PX4固件网址:https://github.com/PX4/PX4-Autopilot

[!IMPORTANT]
1.找到不同的稳定版本
2.release里面有已经编译好直接烧录安装的固件
1.2 PX4固件的使用者手册和开发者手册
PX4固件的使用者手册网址:https://docs.px4.io/main/zh/
机型选择与配置:https://docs.px4.io/main/zh/airframes/

[!IMPORTANT]
特别注意:硬件选择、机型选择、各种传感器、日志分析等
PX4开发者手册:https://docs.px4.io/main/zh/development/development.html
创客智造的两个大博客:
PX4用户指南:https://www.ncnynl.com/archives/201810/2613.html
PX4开发指南:https://www.ncnynl.com/archives/201709/2003.html
1.3 QGC地面站的官网和源码
QGC地面站的官网网址:http://qgroundcontrol.com/

[!NOTE]
无人机飞控内部使用uorb协议进行交流
无人机飞控与地面站之间使用mavlink协议进行数据交流
QGC地面站的源码网址:https://github.com/mavlink/qgroundcontrol
[!NOTE]
1、找到自己需要的分支(代码版本以及具体是测试版本还是稳定、其他)
2、找到已经稳定运行并编译完成的可执行软件文件(win、liunx)。这个在后面的MP地面站目前是不支持liunx。
3、使用Qt进行二次开发
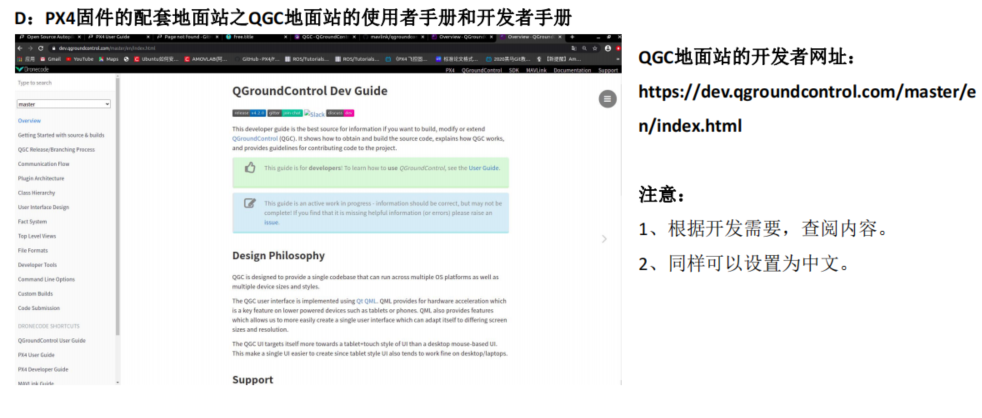
1.4 QGC地面站的使用者手册和开发者手册
QGC地面站的使用者网址:
https://docs.qgroundcontrol.com/master/en/index.html

QGC地面站的开发者网址:
https://dev.qgroundcontrol.com/master/en/index.html
2.飞控固件APM与MP地面站
2.1 APM固件的官网介绍和固件
APM固件的官网介绍网址:https://ardupilot.org/
[!NOTE]
跟踪学习,不同的载具类型(无人机、无人船、水下潜水艇、无人车)、开源社区以及生态系统。
[!NOTE]
其社区里有非常多的VTOL的教程。
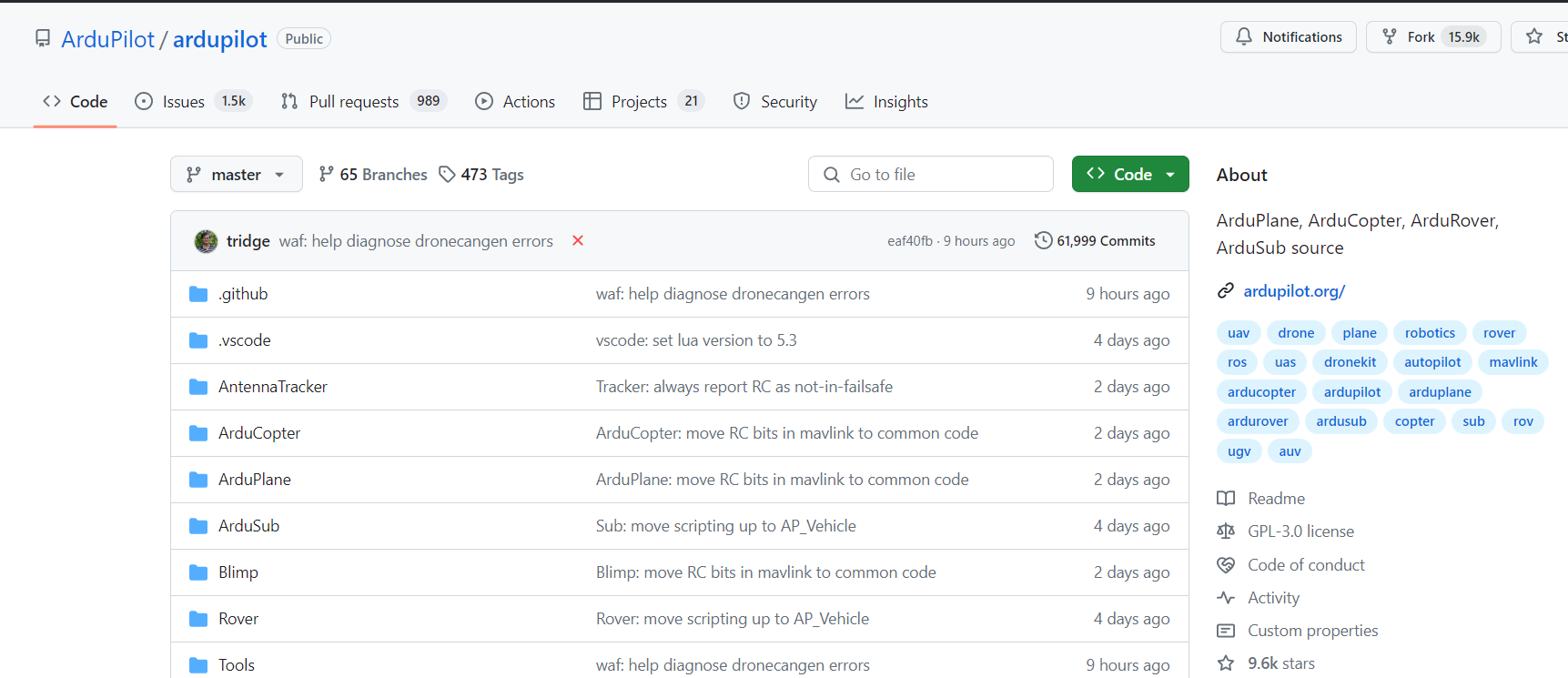
APM固件网址:
https://github.com/ArduPilot/ardupilot
APM官网编译完成的无人机类型:
https://firmware.ardupilot.org/Plane/stable-4.1.7/
[!NOTE]
1、找到自己需要的分支(代码版本以及具体是测试版本还是稳定、其他)
2、找到已经稳定运行并编译完成的 .PX4或者 .apj .hex 文件。这个后缀的文件才是我们硬件可以烧入的文件。
2.2 APM固件的使用者手册和开发者手册
APM固件中无人机的使用者网址:
https://ardupilot.org/copter/index.html
[!NOTE]
硬件选择、机型选择、各种传感器、日志分析等
根据不同的载具类型,进行手册的选择
APM固件的开发者网址:
https://ardupilot.org/dev/index.html

2.3 MP地面站的使用者手册和源码
MP地面站的源码网址:
https://github.com/ArduPilot/MissionPlanner
MP地面站的使用者手册网址:
https://ardupilot.org/planner/docs/mission-planner-overview.html
https://ardupilot.org/planner/

[!NOTE]
1、同样MP地面站也是支持PX4固件的。
2、MP地面站相对于QGC地面站将会复杂很多,但是其中的功能是相当全面的。
3.仿真平台、日志分析
3.1 仿真平台GAZEBO
gazebo的官网:http://gazebosim.org/
ROS:
https://www.ros.org/
MAVLINK:
https://github.com/mavlink
MAVROS:
https://github.com/mavlink/mavros
配置PX4与GAZEBO仿真环境:
https://blog.csdn.net/qq_43538025/article/details/104165959

3.2 日志分析
日志分析之FlightPlot:https://github.com/PX4/FlightPlot
安装该软件的方法:https://blog.csdn.net/qq_33641919/article/details/106883279
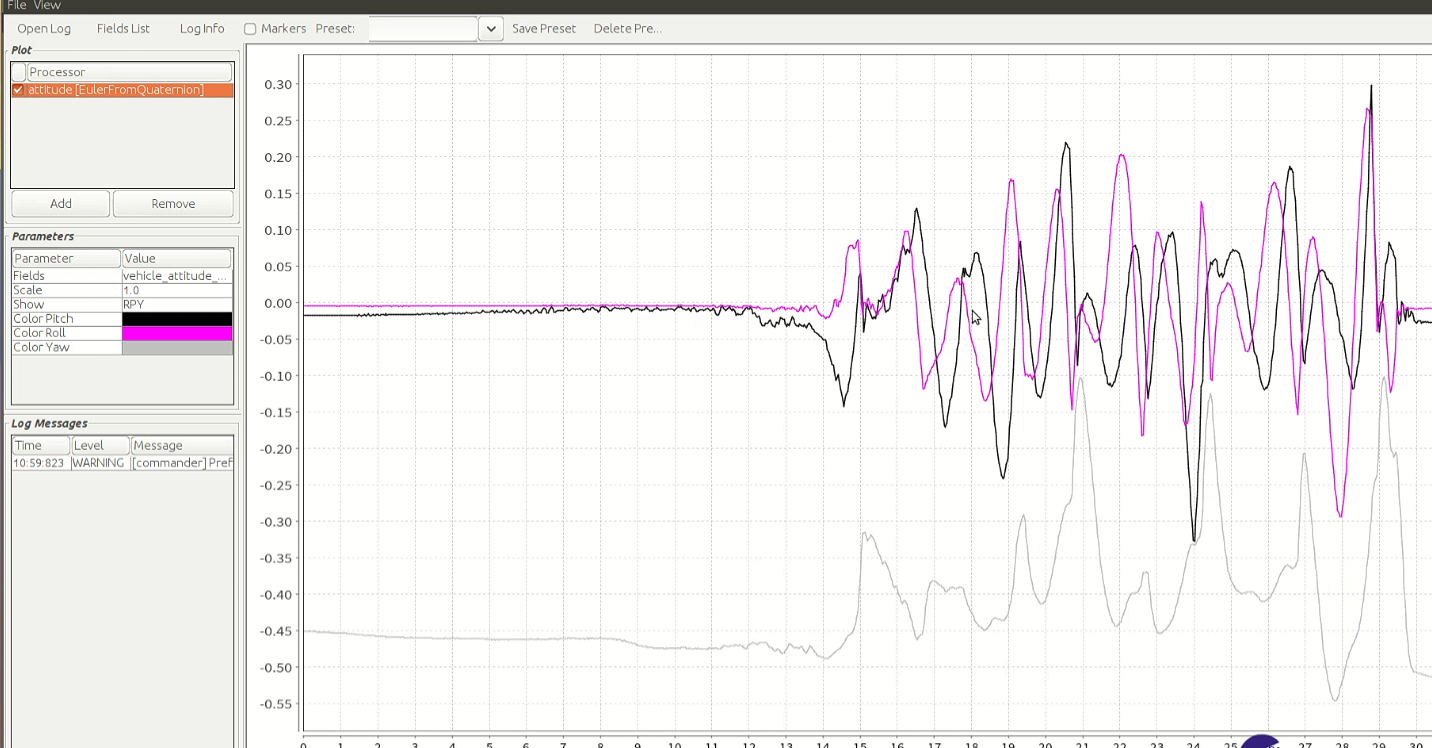
[!NOTE]
可以直接进行分析PX4和APM飞行之后产生的日志。
但是需要人工填加分析数据类型,需要一定使用技巧。
缺点在于直接得到曲线,不能获取具体数据
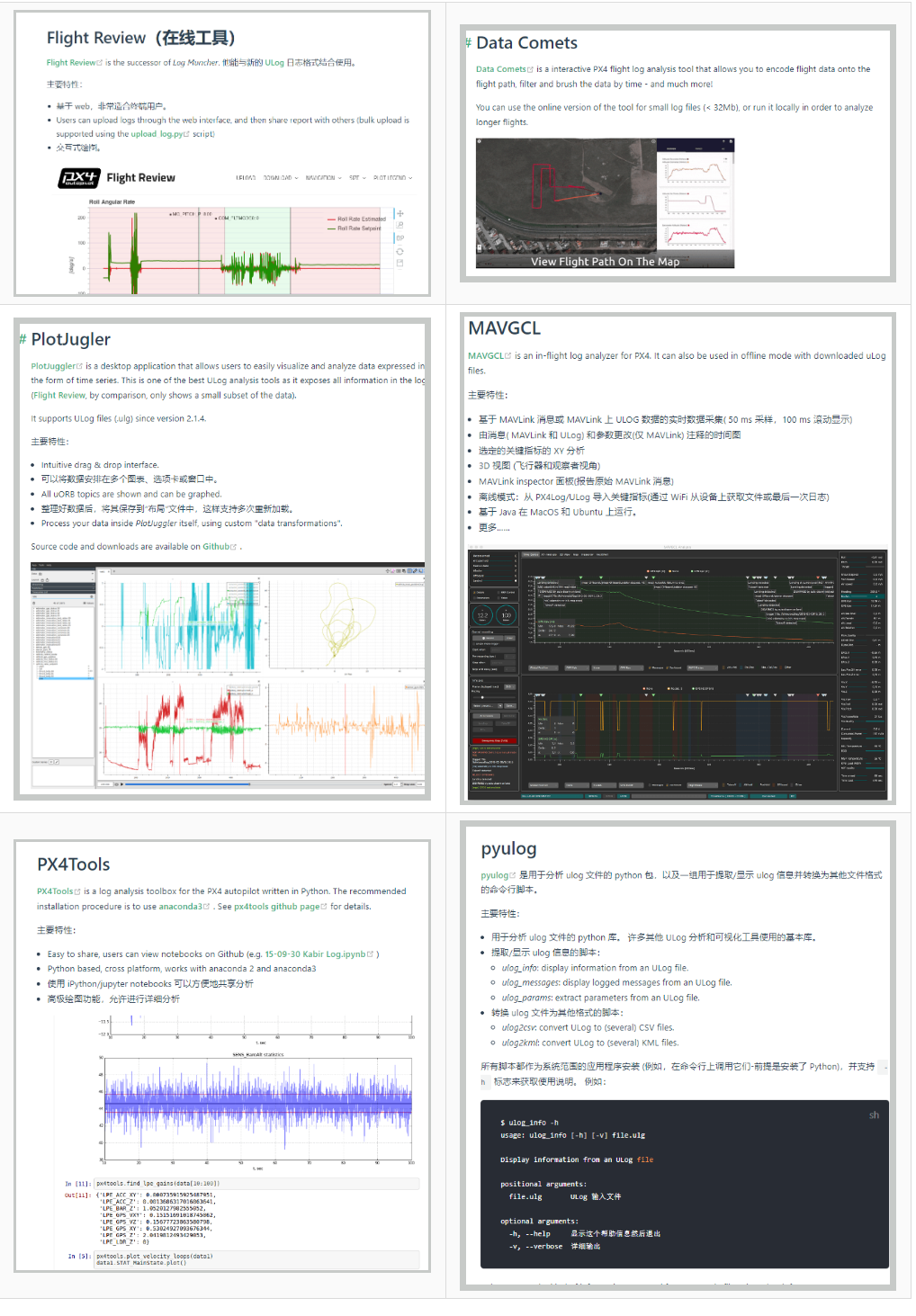
PX4官网推荐的一些其他的日志分析工具:
https://docs.px4.io/main/en/log/plotjuggler_log_analysis.html
Flight Review工具:https://logs.px4.io/
4.其他
4.1 其他飞控硬件赫星和雷迅等
赫星飞控:https://hexuav.com/
雷讯飞控:https://www.cuav.net/
 |  |
|---|
4.2 各类无人机飞行原理简单介绍

[!NOTE]
据伯努利原理,当螺旋桨工作时,进风口内壁空气速度快静压小,外壁流速慢静压大。
无人机的螺旋桨高度旋转时产生的涵道能产生附加拉力。
拉力和涵道的横截面积(螺旋桨的参数)、转速呈正相关。















 7259
7259











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









