







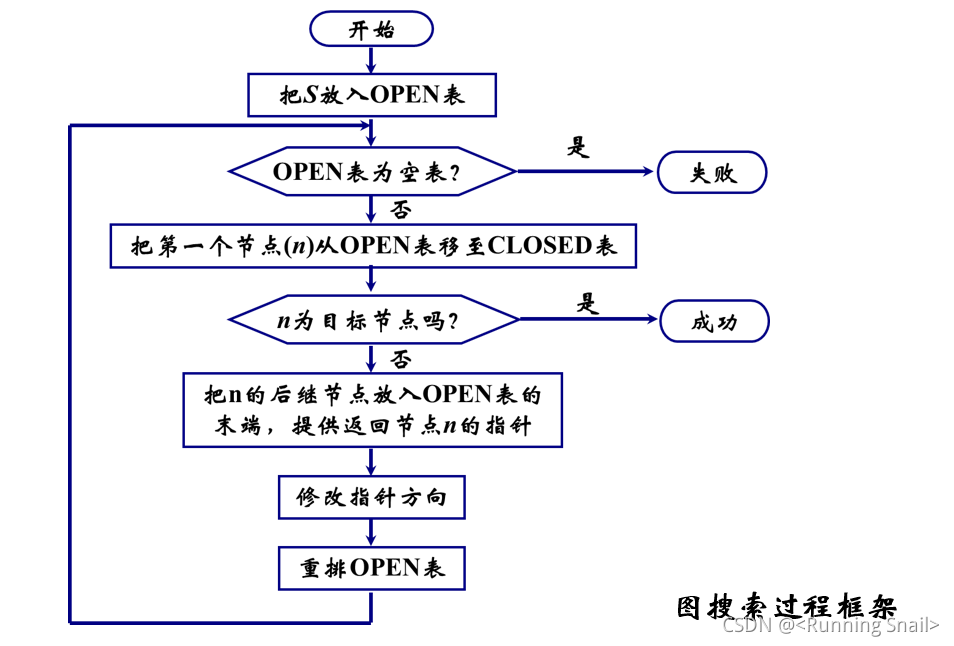
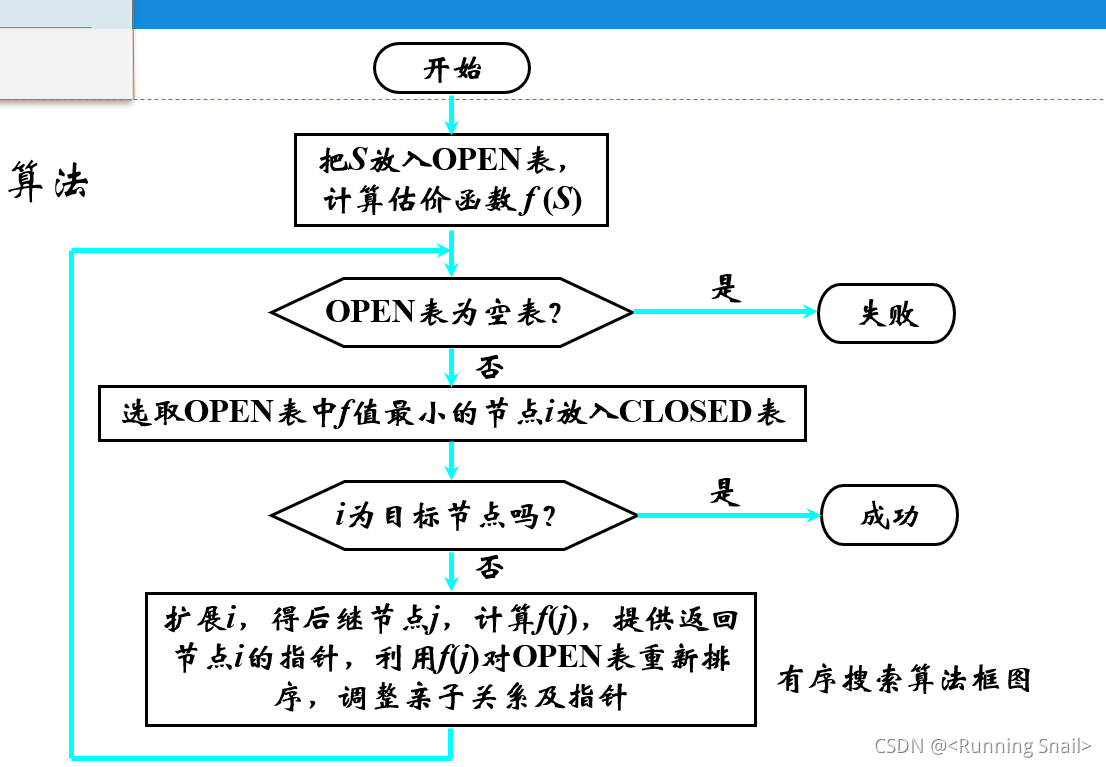
- 必须记住下一步还可以走哪些点——OPEN表(记录还没有扩展的点)
- 必须记住哪些点走过了——CLOSED表(记录已经扩展的点
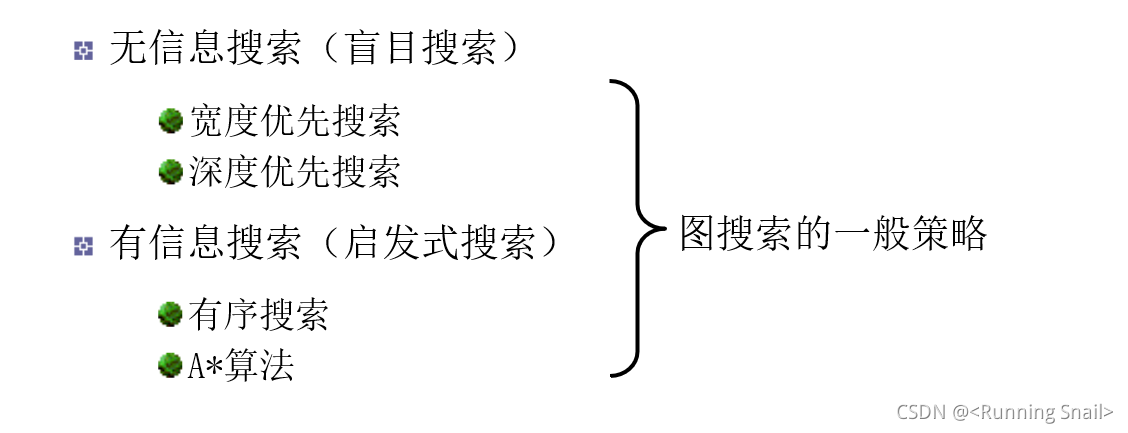
广度优先搜索
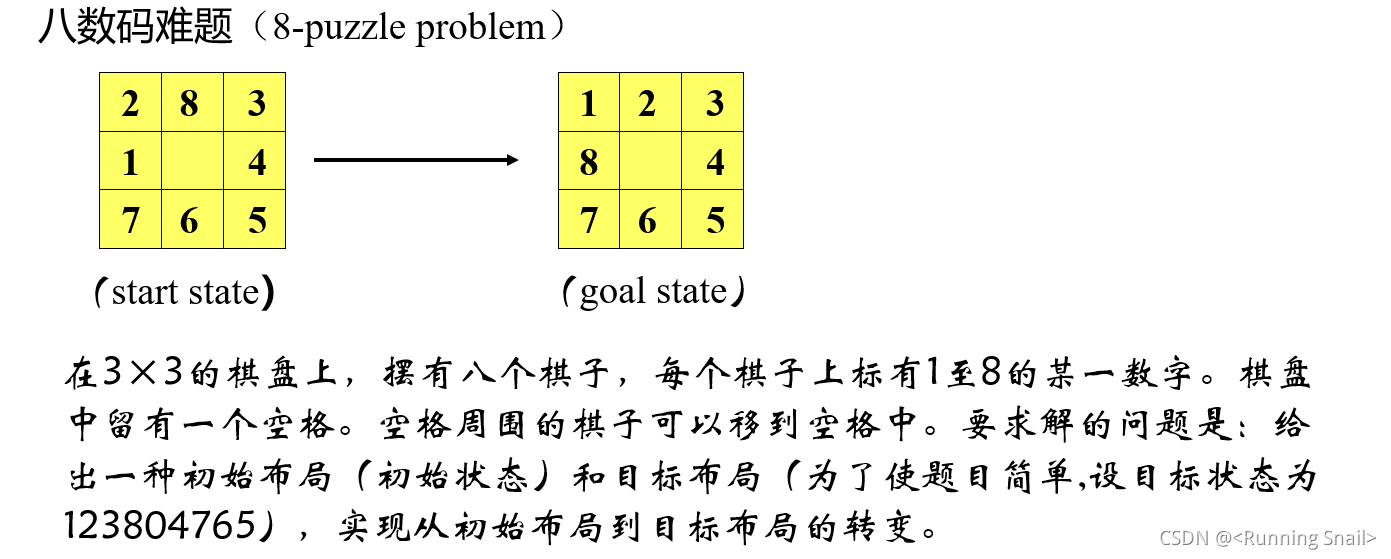
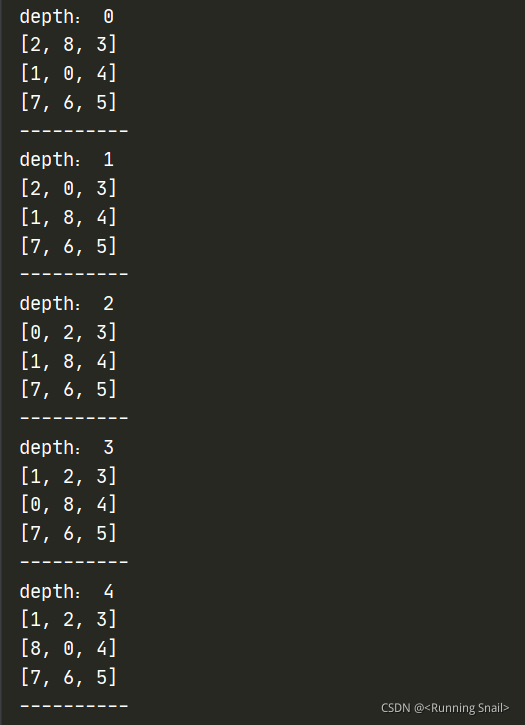
在应用BFS算法进行八数码问题搜索时需要open和closed两个表。首先将初始状态加入open队列,然后进行出队操作并放入closed中,对出队的状态进行扩展(所谓扩展也就是找出其上下左右移动后的状态),将扩展出的状态加入队列,然后继续循环出队-扩展-入队的操作,直到找到解为止。
import copy
#棋盘的类,实现移动和扩展状态
class grid:
def __init__(self,stat):
self.pre=None
self.target=[[1,2,3],[8,0,4],[7,6,5]]
self.stat=stat
self.find0()
self.update()
#更新深度和距离和
def update(self):
self.fH()
self.fG()
#G是深度,也就是走的步数
def fG(self):
if(self.pre!=None):
self.G=self.pre.G+1
else:
self.G=0
#H是和目标状态距离之和,可以用来判断是否达到最优解
def fH(self):
self.H=0
for i in range(3):
for j in range(3):
targetX=self.target[i][j]
nowP=self.findx(targetX)
self.H+=abs(nowP[0]-i)+abs(nowP[1]-j)
#查看当前状态
def see(self):
print("depth:",self.G)
for i in range(3):
print(self.stat[i])
print("-"*10)
#查看找到的解是如何从头移动的
def seeAns(self):
ans=[]
ans.append(self)
p=self.pre
while(p):
ans.append(p)
p=p.pre
ans.reverse()
for i in ans:
i.see()
#找到数字x的位置,返回其坐标
def findx(self,x):
for i in range(3):
if(x in self.stat[i]):
j=self.stat[i].index(x)
return [i,j]
#找到0,也就是空白格的位置
def find0(self):
self.zero=self.findx(0)
#对当前状态进行所有可能的扩展,返回一个扩展状态的列表
def expand(self):
i=self.zero[0]
j=self.zero[1]
gridList=[]
if(j==2 or j==1):
gridList.append(self.left())
if(i==2 or i==1):
gridList.append(self.up())
if(i==0 or i==1):
gridList.append(self.down())
if(j==0 or j==1):
gridList.append(self.right())
return gridList
#deepcopy多维列表的复制,防止指针赋值将原列表改变
#move只能移动行或列,即row和col必有一个为0
#对当前状态进行移动
def move(self,row,col):
newStat=copy.deepcopy(self.stat)
tmp=self.stat[self.zero[0]+row][self.zero[1]+col]
newStat[self.zero[0]][self.zero[1]]=tmp
newStat[self.zero[0]+row][self.zero[1]+col]=0
return newStat
def up(self):
return self.move(-1,0)
def down(self):
return self.move(1,0)
def left(self):
return self.move(0,-1)
def right(self):
return self.move(0,1)
#计算逆序数之和
def N(nums):
N=0
for i in range(len(nums)):
if(nums[i]!=0):
for j in range(i):
if(nums[j]>nums[i]):
N+=1
return N
#根据逆序数之和判断所给八数码是否可解
def judge(src,target):
N1=N(src)
N2=N(target)
if(N1%2==N2%2):
return True
else:
return False
#初始化状态
startStat=[[2,8,3],[1,0,4],[7,6,5]]
g=grid(startStat)
if(judge(startStat,g.target)!=True):
print("所给八数码无解,请检查输入")
exit(1)
visited=[]
queue=[g]
time=0
while(queue):
time+=1
v=queue.pop(0)
#判断是否找到解
if(v.H==0):
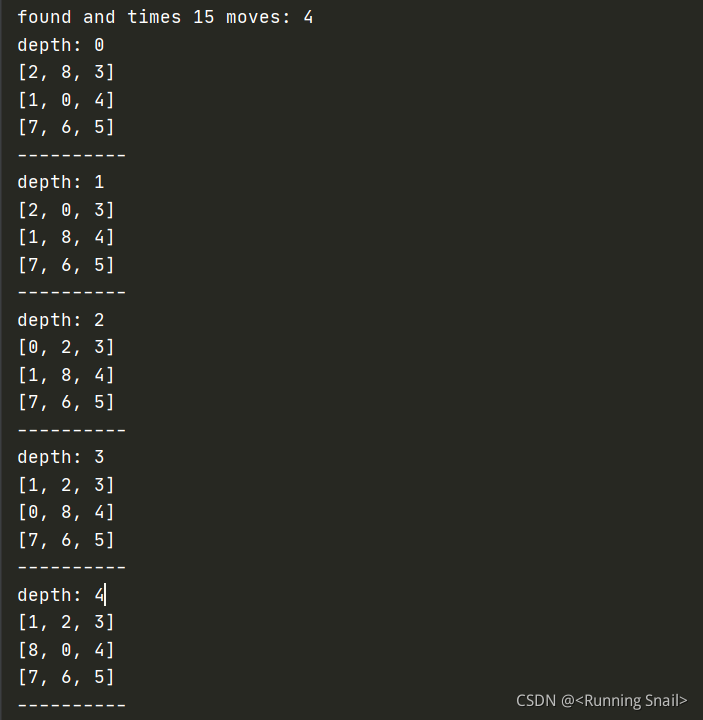
print("found and times:",time,"moves:",v.G)
#查看找到的解是如何从头移动的
v.seeAns()
break
else:
#对当前状态进行扩展
visited.append(v.stat)
expandStats=v.expand()
for stat in expandStats:
tmpG=grid(stat)
tmpG.pre=v
tmpG.update()
if(stat not in visited):
queue.append(tmpG)
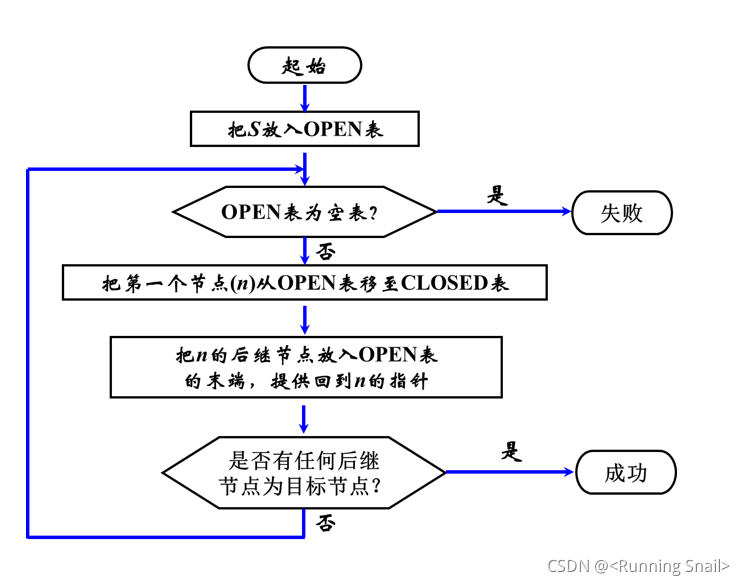
深度优先搜索

# -*- coding: utf-8 -*-
'''
深度优先搜索实现
'''
import copy
#棋盘的类,实现移动和扩展状态
class grid:
def __init__(self, stat):
self.pre = None
self.target = [[1, 2, 3], [8, 0, 4], [7, 6, 5]]
self.stat = stat
self.find0()
self.update()
#更新深度和距离和
def update(self):
self.fH()
self.fG()
# G是深度,也就是走的步数
def fG(self):
if (self.pre != None):
self.G = self.pre.G + 1
else:
self.G = 0
# H是和目标状态距离之和,可以用来判断是否找到解
def fH(self):
self.H = 0
for i in range(3):
for j in range(3):
targetX = self.target[i][j]
nowP = self.findx(targetX)
self.H += abs(nowP[0] - i) + abs(nowP[1] - j)
#以三行三列的形式输出当前状态
def see(self):
print("depth:", self.G)
for i in range(3):
print(self.stat[i])
print("-" * 10)
# 查看找到的解是如何从头移动的
def seeAns(self):
ans = []
ans.append(self)
p = self.pre
while (p):
ans.append(p)
p = p.pre
ans.reverse()
for i in ans:
i.see()
#找到数字x的位置
def findx(self, x):
for i in range(3):
if (x in self.stat[i]):
j = self.stat[i].index(x)
return [i, j]
#找到0的位置,也就是空白格的位置
def find0(self):
self.zero = self.findx(0)
#对当前状态进行扩展,也就是上下左右移动,返回的列表中是状态的二维列表,不是对象
def expand(self):
i = self.zero[0]
j = self.zero[1]
gridList = []
if (j == 2 or j == 1):
gridList.append(self.left())
if (i == 2 or i == 1):
gridList.append(self.up())
if (i == 0 or i == 1):
gridList.append(self.down())
if (j == 0 or j == 1):
gridList.append(self.right())
return gridList
# deepcopy多维列表的复制,防止指针赋值将原列表改变
# move只能移动行或列,即row和col必有一个为0
#对当前状态进行移动的函数
def move(self, row, col):
newStat = copy.deepcopy(self.stat)
tmp = self.stat[self.zero[0] + row][self.zero[1] + col]
newStat[self.zero[0]][self.zero[1]] = tmp
newStat[self.zero[0] + row][self.zero[1] + col] = 0
return newStat
def up(self):
return self.move(-1, 0)
def down(self):
return self.move(1, 0)
def left(self):
return self.move(0, -1)
def right(self):
return self.move(0, 1)
# 判断状态g是否在状态集合中,g是对象,gList是对象列表
#返回的结果是一个列表,第一个值是真假,如果是真则第二个值是g在gList中的位置索引
def isin(g, gList):
gstat = g.stat
statList = []
for i in gList:
statList.append(i.stat)
if (gstat in statList):
res = [True, statList.index(gstat)]
else:
res = [False, 0]
return res
#计算逆序数之和
def N(nums):
N=0
for i in range(len(nums)):
if(nums[i]!=0):
for j in range(i):
if(nums[j]>nums[i]):
N+=1
return N
#根据逆序数之和判断所给八数码是否可解
def judge(src,target):
N1=N(src)
N2=N(target)
if(N1%2==N2%2):
return True
else:
return False
#初始状态
startStat = [[2, 8, 3], [1, 0, 4], [7, 6, 5]]
g = grid(startStat)
#判断所给的八数码受否有解
if(judge(startStat,g.target)!=True):
print("所给八数码无解,请检查输入")
exit(1)
#visited储存的是已经扩展过的节点
visited = []
time = 0
#用递归的方式进行DFS遍历
def DFSUtil(v, visited):
global time
#判断是否达到深度界限
if (v.G > 4):
return
time+=1
#判断是否已经找到解
if (v.H == 0):
print("found and times", time, "moves:", v.G)
v.seeAns()
exit(1)
#对当前节点进行扩展
visited.append(v.stat)
expandStats = v.expand()
w = []
for stat in expandStats:
tmpG = grid(stat)
tmpG.pre = v
tmpG.update()
if (stat not in visited):
w.append(tmpG)
for vadj in w:
DFSUtil(vadj, visited)
#visited查重只对一条路,不是全局的,每条路开始时都为空
#因为如果全局查重,会导致例如某条路在第100层找到的状态,在另一条路是第2层找到也会被当做重复
#进而导致明明可能会找到解的路被放弃
visited.pop()
DFSUtil(g, visited)
#如果找到解程序会在中途退出,走到下面这一步证明没有找到解
print("在当前深度下没有找到解,请尝试增加搜索深度")
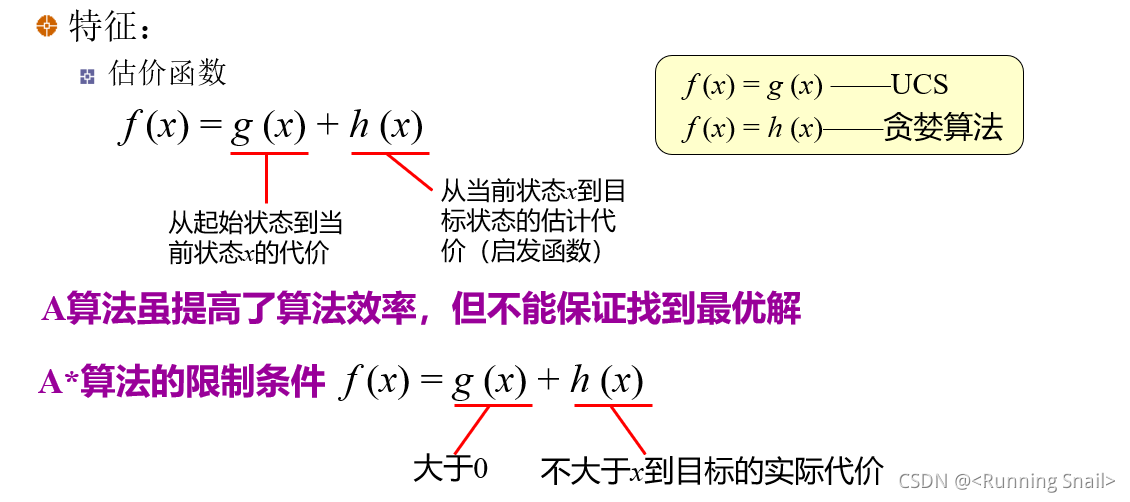
3. 启发式搜索
特点:重排OPEN表,选择最有希望的节点加以扩展。
引入估价函数(evaluation function)来估计节点位于解路径上的“希望”,函数值越小“希望”越大 搜索过程中按照估价函数的大小对OPEN表排序, 每次选择估价函数值最小的节点作为下一步考察的节点
3.1 有序搜索
选择OPEN表上具有最小f 值的节点作为下一个要扩展的节点。
对应到八数码问题:
f
(
x
)
=
g
(
x
)
+
h
(
x
)
f (x) = g (x) + h (x)
f(x)=g(x)+h(x)
- g (x):从初始状态到x需要进行的移动操作的次数
- h (x):所有棋子与目标位置的曼哈顿距离之和
- 曼哈顿距离:两点之间水平距离和垂直距离之和 仍满足估价函数的限制条件
'''
有序搜索
'''
import copy
import numpy as np
from datetime import datetime
# 字符串列表化
def string_to_ls(str):
return [i.split(' ') for i in str.split(',')]
# 获取位置
def get_loacl(arr, target):
# r, c = np.where(arr == target)
# return r, c
for i in arr:
for j in i:
if j == target:
return arr.index(i), i.index(j)
# 获取可以和0交换位置的元素
def get_elements(arr):
r, c = get_loacl(arr, '0')
elements = []
if r > 0:
elements.append(arr[r - 1][c]) # 上面的元素
if r < 2:
elements.append(arr[r + 1][c]) # 下边的元素
if c > 0:
elements.append(arr[r][c - 1]) # 左面的元素
if c < 2:
elements.append(arr[r][c + 1]) # 右面的元素
return elements
def get_child(arr, e):
# 深拷贝与浅拷贝!!
arr_new = copy.deepcopy(arr)
r, c = get_loacl(arr_new, '0')
r1, c1 = get_loacl(arr_new, e)
arr_new[r][c], arr_new[r1][c1] = arr_new[r1][c1], arr_new[r][c]
return arr_new
# 哈密尔顿距离
def get_distance(arr1, arr2):
distance = []
for i in arr1:
for j in i:
loc1 = get_loacl(arr1, j)
loc2 = get_loacl(arr2, j)
distance.append(abs(loc1[0] - loc2[0]) + abs(loc1[1] - loc2[1]))
return sum(distance)
def is_goal(arr, goal):
return arr == goal
class state:
def __init__(self, state, deep, parent, distance):
# state是一个3x3的ls矩阵
self.state = state
self.deep = deep
self.parent = parent
self.distance = distance
def chidren(self):
chidren = []
for i in get_elements(self.state):
child = state(state=get_child(self.state, i),
deep=self.deep + 1,
parent=self,
distance=self.deep + 1 + get_distance(self.state, goal_arr))
chidren.append(child)
return chidren
# 打印求解路径
def print_path(n):
if n.parent == None:
return
else:
print('↑')
print(np.array(n.parent.state))
print_path(n.parent)
if __name__ == '__main__':
# initial = '0 1 3,4 2 5,7 8 6'
# goal = '4 1 3,7 0 5,8 2 6'
initial = '4 0 1,6 8 5,7 3 2'
goal = '5 8 2,1 0 4,6 3 7'
initial_arr = string_to_ls(initial)
goal_arr = string_to_ls(goal)
initial_arr = state(initial_arr, deep=0, parent=None, distance=get_distance(initial_arr, goal_arr))
start = datetime.now()
open = [initial_arr]
close = []
# limit = eval(input('请输入要搜索的深度:'))
limit = 19
while len(open) > 0:
open_tb = [i.state for i in open]
close_tb = [i.state for i in close]
n = open.pop(0)
close.append(n)
if is_goal(n.state, goal_arr):
print(np.array(n.state))
print_path(n)
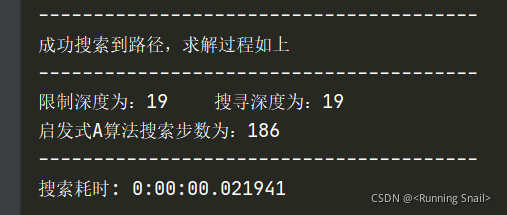
print('--' * 20)
print('成功搜索到路径,求解过程如上')
break
else:
if n.deep < limit:
for i in n.chidren():
if i.state not in open_tb:
if i.state not in close_tb:
open.insert(0, i)
open.sort(key=lambda x: x.distance)
else:
print('该深度下无解')
end = datetime.now()
print('--' * 20)
print('限制深度为:{}\t搜寻深度为:{}\n启发式A算法搜索步数为:{}'.format(limit, close[-1].deep, len(close) - 2))
print('--' * 20)
print('搜索耗时:', end - start)
3.2 A*算法
估价函数的定义
对节点n定义
f
∗
(
n
)
=
g
∗
(
n
)
+
h
∗
(
n
)
f ^*(n)=g^ *(n)+h^*(n)
f∗(n)=g∗(n)+h∗(n),表示从S开始约束通过节点n的一条最佳路径的代价。希望估价函数f 定义为:f(n)=g(n)+h(n),g是g的估计 ,h是h的估计
A算法的定义
定义1 在GRAPHSEARCH过程中,如果第8步的重排OPEN表是依据f(x)=g(x)+h(x)进行的,则称该过程为A算法。
定义2 在A算法中,如果对所有的x存在h(x)≤h(x),则称h(x)为h*(x)的下界,它表示某种偏于保守的估计。
定义3 采用h*(x)的下界h(x)为启发函数的A算法,称为A算法。当h=0时, A算法就变为有序搜索算法。
import copy
#棋盘的类,实现移动和扩展状态
class grid:
def __init__(self,stat):
self.pre=None
#目标状态
self.target=[[1,2,3],[8,0,4],[7,6,5]]
#stat是一个二维列表
self.stat=stat
self.find0()
self.update()
#更新启发函数的相关信息
def update(self):
self.fH()
self.fG()
self.fF()
#G是深度,也就是走的步数
def fG(self):
if(self.pre!=None):
self.G=self.pre.G+1
else:
self.G=0
#H是和目标状态距离之和
def fH(self):
self.H=0
for i in range(3):
for j in range(3):
targetX=self.target[i][j]
nowP=self.findx(targetX)
#曼哈顿距离之和
self.H+=abs(nowP[0]-i)+abs(nowP[1]-j)
#F是启发函数,F=G+H
def fF(self):
self.F=self.G+self.H
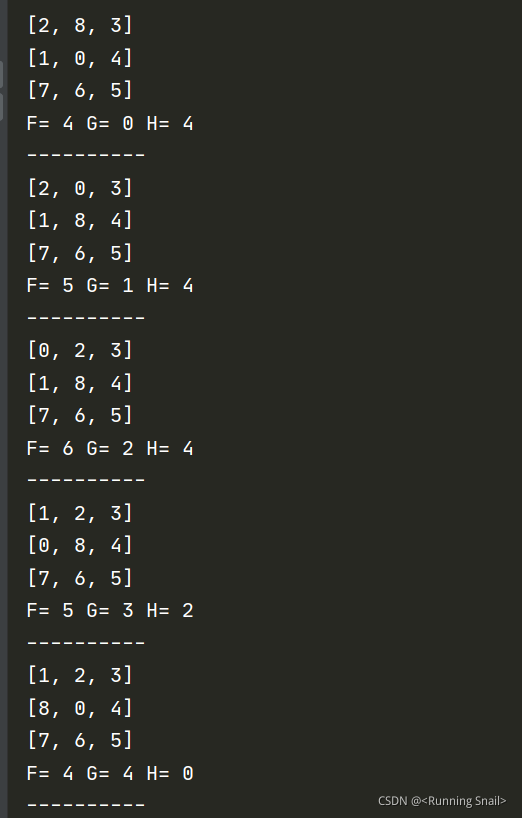
#以三行三列的形式输出当前状态
def see(self):
for i in range(3):
print(self.stat[i])
print("F=",self.F,"G=",self.G,"H=",self.H)
print("-"*10)
#查看找到的解是如何从头移动的
def seeAns(self):
ans=[]
ans.append(self)
p=self.pre
while(p):
ans.append(p)
p=p.pre
ans.reverse()
for i in ans:
i.see()
#找到数字x的位置
def findx(self,x):
for i in range(3):
if(x in self.stat[i]):
j=self.stat[i].index(x)
return [i,j]
#找到0,也就是空白格的位置
def find0(self):
self.zero=self.findx(0)
#扩展当前状态,也就是上下左右移动。返回的是一个状态列表,也就是包含stat的列表
def expand(self):
i=self.zero[0]
j=self.zero[1]
gridList=[]
if(j==2 or j==1):
gridList.append(self.left())
if(i==2 or i==1):
gridList.append(self.up())
if(i==0 or i==1):
gridList.append(self.down())
if(j==0 or j==1):
gridList.append(self.right())
return gridList
#deepcopy多维列表的复制,防止指针赋值将原列表改变
#move只能移动行或列,即row和col必有一个为0
#向某个方向移动
def move(self,row,col):
newStat=copy.deepcopy(self.stat)
tmp=self.stat[self.zero[0]+row][self.zero[1]+col]
newStat[self.zero[0]][self.zero[1]]=tmp
newStat[self.zero[0]+row][self.zero[1]+col]=0
return newStat
def up(self):
return self.move(-1,0)
def down(self):
return self.move(1,0)
def left(self):
return self.move(0,-1)
def right(self):
return self.move(0,1)
#判断状态g是否在状态集合中,g是对象,gList是对象列表
#返回的结果是一个列表,第一个值是真假,如果是真则第二个值是g在gList中的位置索引
def isin(g,gList):
gstat=g.stat
statList=[]
for i in gList:
statList.append(i.stat)
if(gstat in statList):
res=[True,statList.index(gstat)]
else:
res=[False,0]
return res
#计算逆序数之和
def N(nums):
N=0
for i in range(len(nums)):
if(nums[i]!=0):
for j in range(i):
if(nums[j]>nums[i]):
N+=1
return N
#根据逆序数之和判断所给八数码是否可解
def judge(src,target):
N1=N(src)
N2=N(target)
if(N1%2==N2%2):
return True
else:
return False
#Astar算法的函数
def Astar(startStat):
#open和closed存的是grid对象
open=[]
closed=[]
#初始化状态
g=grid(startStat)
#检查是否有解
if(judge(startStat,g.target)!=True):
print("所给八数码无解,请检查输入")
exit(1)
open.append(g)
#time变量用于记录遍历次数
time=0
#当open表非空时进行遍历
while(open):
#根据启发函数值对open进行排序,默认升序
open.sort(key=lambda G:G.F)
#找出启发函数值最小的进行扩展
minFStat=open[0]
#检查是否找到解,如果找到则从头输出移动步骤
if(minFStat.H==0):
print("found and times:",time,"moves:",minFStat.G)
minFStat.seeAns()
break
#走到这里证明还没有找到解,对启发函数值最小的进行扩展
open.pop(0)
closed.append(minFStat)
expandStats=minFStat.expand()
#遍历扩展出来的状态
for stat in expandStats:
#将扩展出来的状态(二维列表)实例化为grid对象
tmpG=grid(stat)
#指针指向父节点
tmpG.pre=minFStat
#初始化时没有pre,所以G初始化时都是0
#在设置pre之后应该更新G和F
tmpG.update()
#查看扩展出的状态是否已经存在与open或closed中
findstat=isin(tmpG,open)
findstat2=isin(tmpG,closed)
#在closed中,判断是否更新
if(findstat2[0]==True and tmpG.F<closed[findstat2[1]].F):
closed[findstat2[1]]=tmpG
open.append(tmpG)
time+=1
#在open中,判断是否更新
if(findstat[0]==True and tmpG.F<open[findstat[1]].F):
open[findstat[1]]=tmpG
time+=1
#tmpG状态不在open中,也不在closed中
if(findstat[0]==False and findstat2[0]==False):
open.append(tmpG)
time+=1
stat=[[2, 8, 3], [1, 0 ,4], [7, 6, 5]]
Astar(stat)
https://github.com/roadwide/AI-Homework
https://blog.csdn.net/Juuunn/article/details/109439359

















 2635
2635

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









