









目录
1 概述
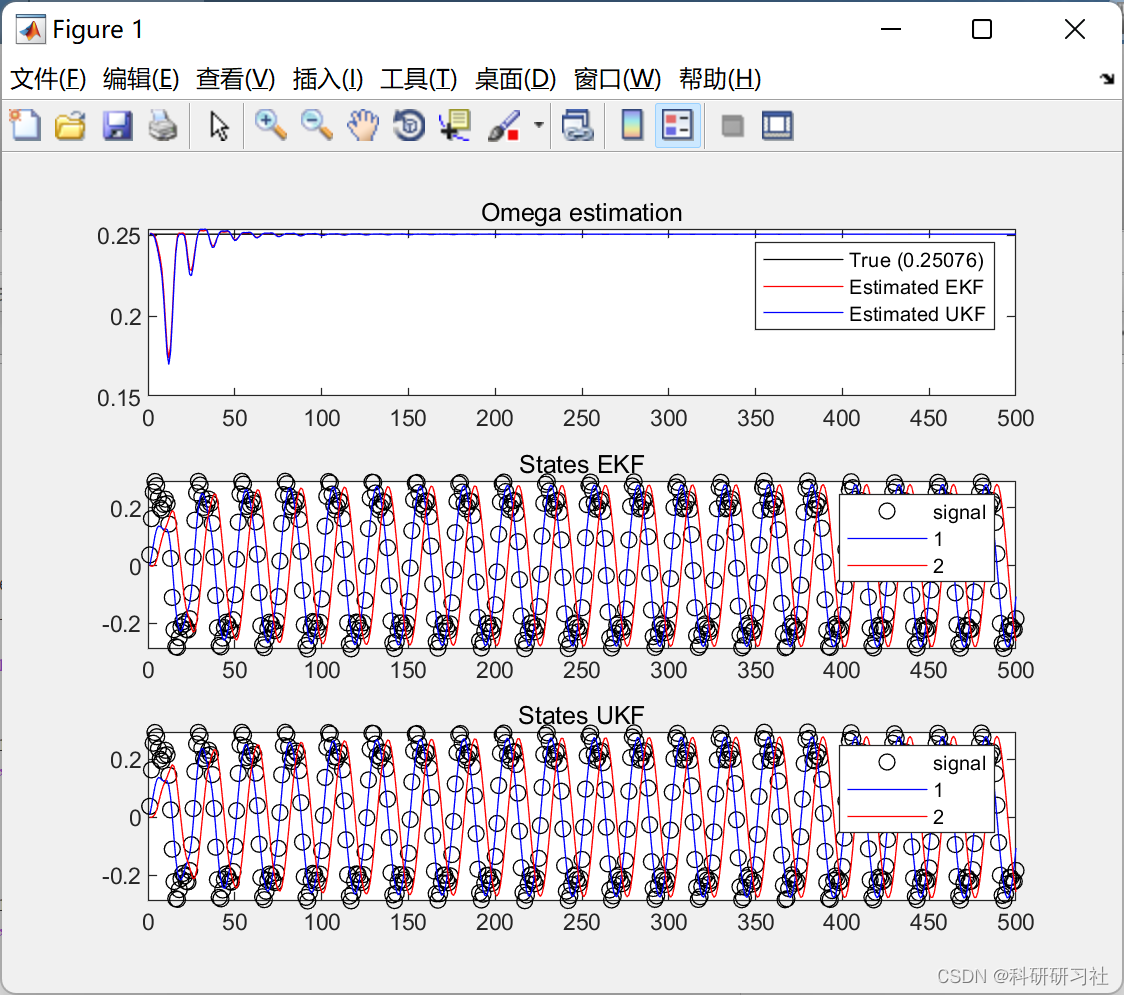
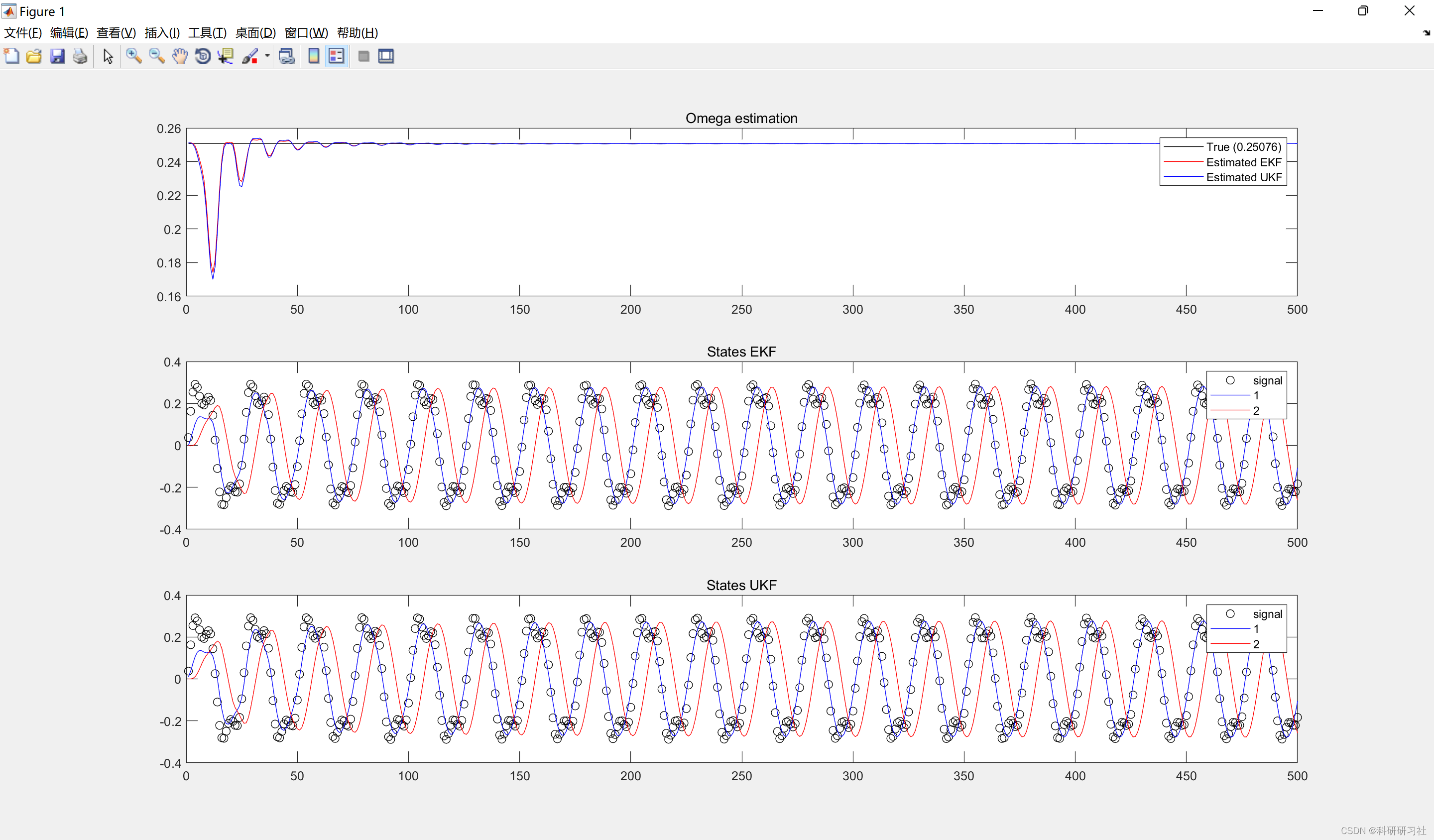
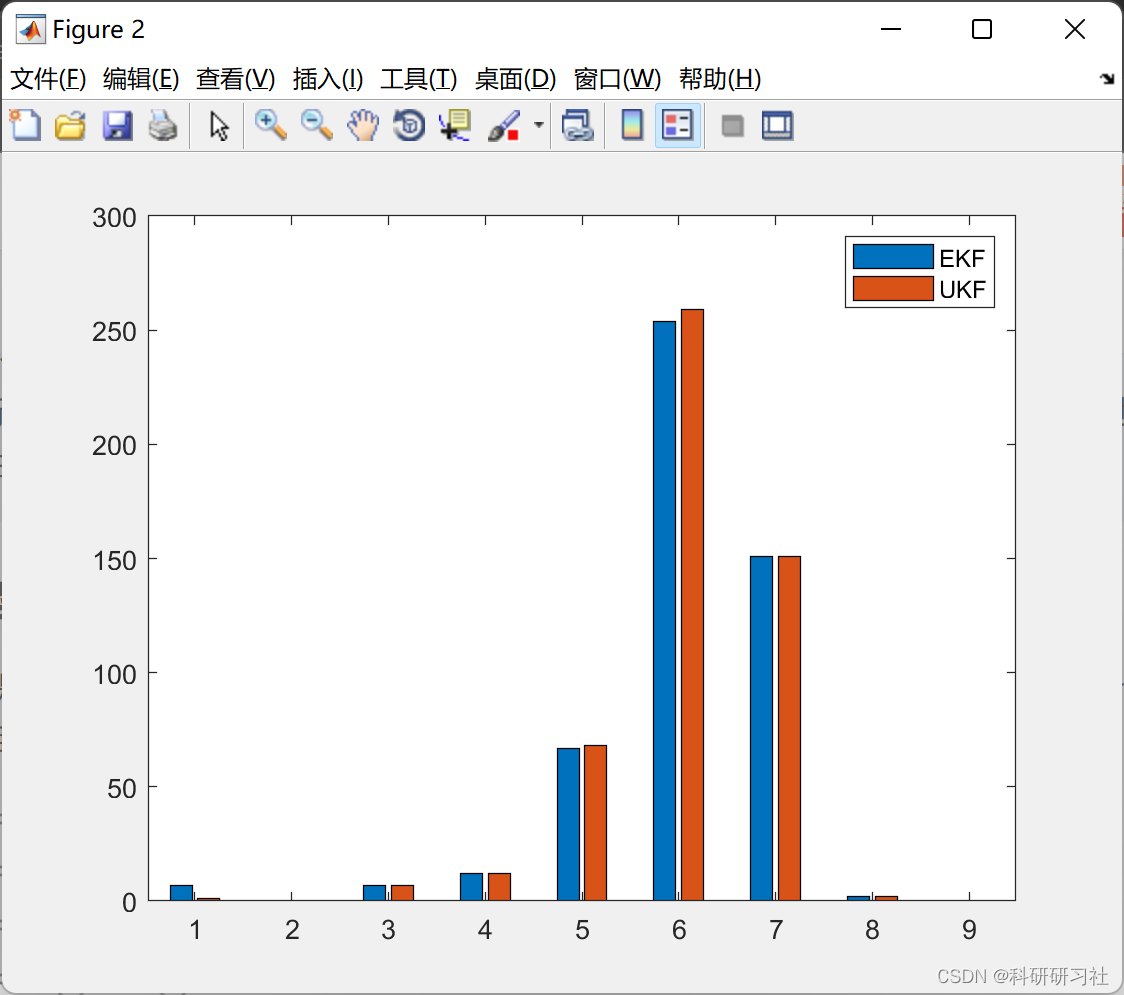
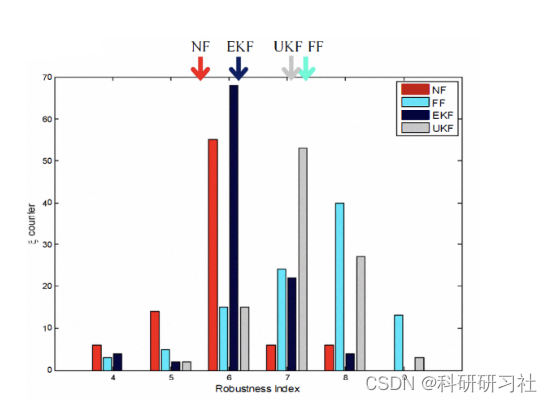
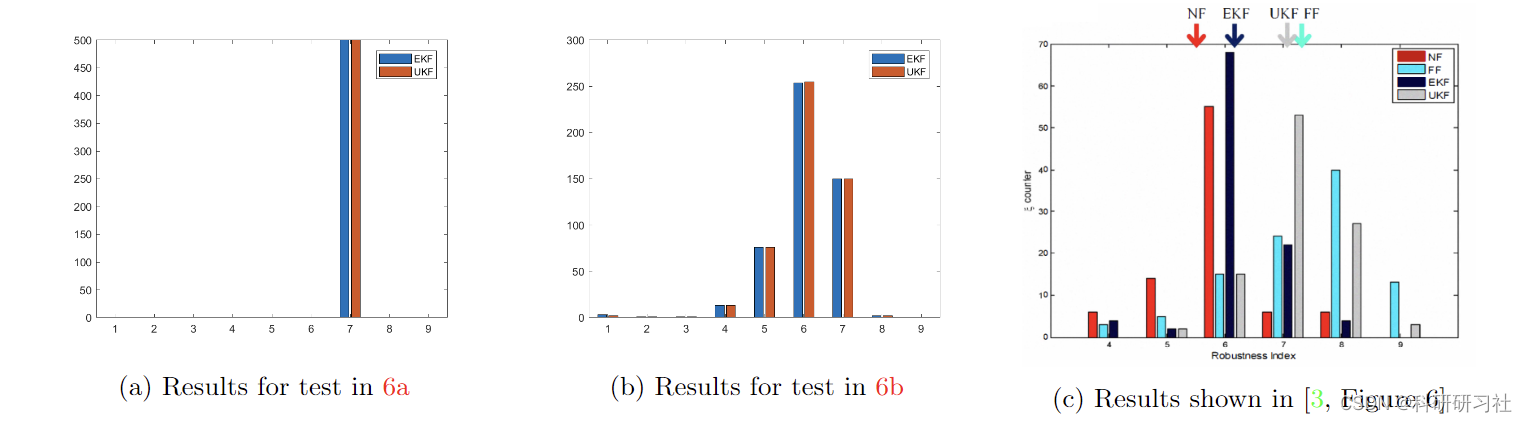
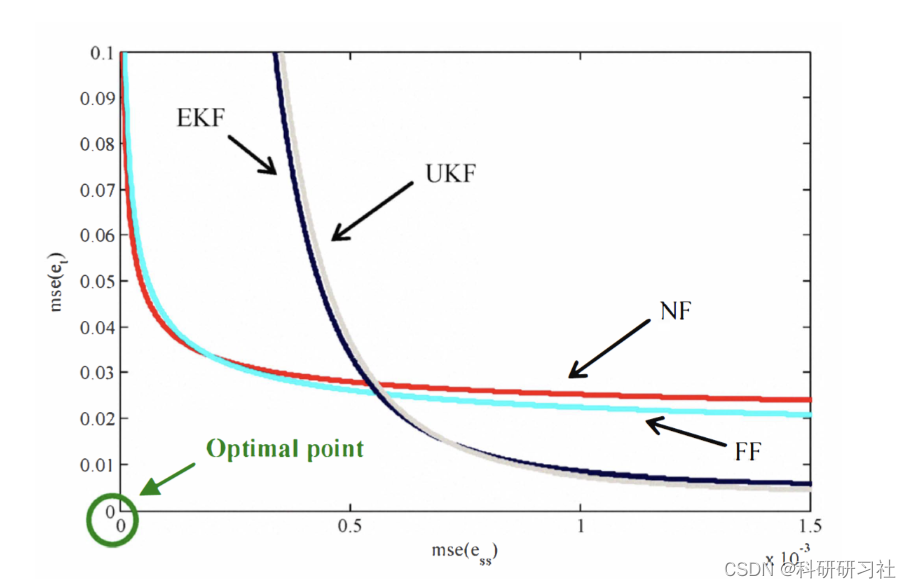
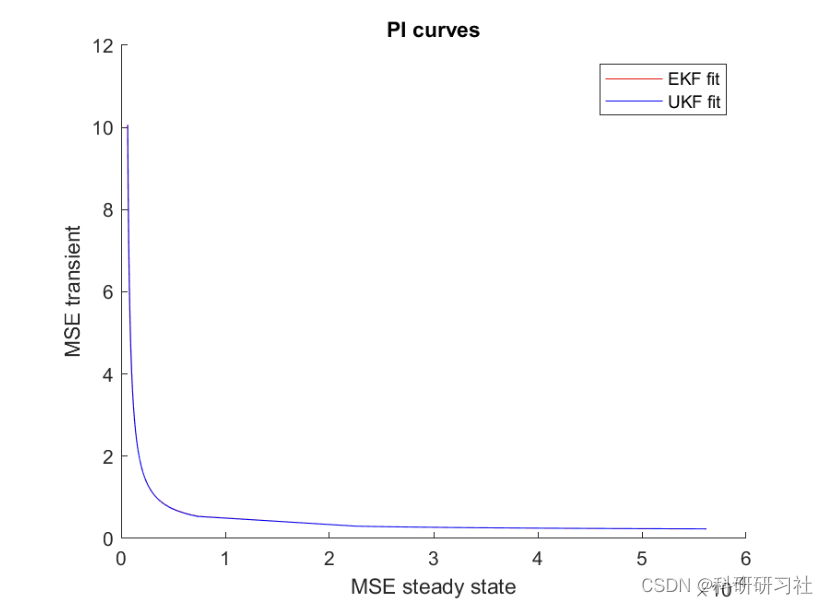
本文讲解和比较了基于卡尔曼滤波器的频率跟踪方法的能力,例如扩展卡尔曼滤波器 (EKF) 和无味卡尔曼滤波器 (UKF),以跟踪窄带谐波信号的时变频率。这些结果与 Savaresi 等人的结果进行了比较。在 [3] 中。为了评估算法实现的估计质量,使用了两个标准:性能指数 (PI) 和鲁棒性指数 (RI),如 [3] 中所述。引入了辅助收敛比以更好地解释 PI 图。考虑两个信号:从现实世界记录的单频正弦信号和生成的噪声信号,该信号具有随时间变化的频率,遵循阶跃分布。该算法能够以~10-7 的精度估计真实世界的信号,并实现与 [3] 一致的性能。在最后一节中显示和讨论了获得的结果。
本文讨论了估计嵌入噪声的窄带谐波信号的频率问题;特别是基于卡尔曼滤波器的方法,例如扩展卡尔曼滤波器 (EKF) 和无迹卡尔曼滤波器 (UKF)。为了评估算法实现的估计质量,引入了两个标准:性能指数(PI)和鲁棒性指数(RI),以及辅助收敛比。已对记录的真实信号和生成的噪声信号进行了测试。详细文章见第3部分。
2 数学模型
所提出的模型是从信号表示为笛卡尔平面中具有角速度 Φ(t) 的旋转矢量构建的。通过将向量沿轴的两个投影和瞬时频率作为状态变量推导出三阶状态空间模型(ARMA 表示)
详细讲解见:
%% RI
clear all
close all
clc
fclose('all');
global logpath;
addpath('./ukf')
addpath('./ekf')
addpath('./generate')
addpath('./ri')
PLOT_PREDICTION = false;
PLOT_PROFILE = false;
COMPUTE = true;
% Parameters
initial_omega = pi/2;
step_profile = [pi/11 -pi/5.5 pi/4 -pi/3.4 pi/2.8 -pi/2.5 pi/2 -pi/1.6 pi/1.4]; % Approximation of Fig.2 on the paper
step_length = 400;
sigma = 1e+1;
q = 1e-5;
r = sigma*q;
n_simulations = 500;
initialization_noise_sigma = 0.001;
threshold = 120;
% sigma_noise = 2e-2;
% sigma_omega_noise = 1e-3;
sigma_noise = 4e-1;
sigma_omega_noise = 3e-1;
if (PLOT_PREDICTION)
ri_figure = figure('visible','off');
set(ri_figure, 'Position', [0, 0, 720, 720],'Resize','off')
end
namestring = sprintf('q%1.2e_s%1.2e_sn%1.2e_sno%1.2e',q,sigma,sigma_noise,sigma_omega_noise);
logpath = strcat(pwd,'\data\ri\',namestring,'\')
if ~exist(logpath,'dir'), mkdir(logpath), end
if (COMPUTE)
ri_ekf = zeros(1,n_simulations);
ri_ukf = ri_ekf;
for ii = 1:n_simulations
fprintf('***** Iteration %d *****\n',ii)
% Generate signal
[signal, omega]=generate_signal_step(step_length,initial_omega,step_profile,sigma_noise,sigma_omega_noise);
%% Track
x_pred_0 = [0, 0, normrnd(omega(1),omega(1)*initialization_noise_sigma)]; % Initialization
pred_vec_ekf = ekf( ...
signal, ...%signal
x_pred_0, ...%x_pred_0
initialization_noise_sigma, ...%sigma_init
r, ... %r,
q ... %q
);
pred_vec_ukf = ukf( ...
signal, ...%signal
x_pred_0, ...%x_pred_0
initialization_noise_sigma, ...%sigma_init
r, ... %r,
q ... %q
);
% Take only the state we are interested in
pred_omega_ekf = pred_vec_ekf(3,:);
pred_omega_ukf = pred_vec_ukf(3,:);
disp('************ EKF *************');
ri_ekf(ii) = compute_ri(pred_omega_ekf,omega,step_length,threshold);
disp('************ UKF *************');
ri_ukf(ii) = compute_ri(pred_omega_ukf,omega,step_length,threshold);
% Plot ground truth and predictions
if PLOT_PREDICTION
set(0, 'currentfigure', ri_figure);
clf;
title('Predictions for RI');
t = 1:length(omega);
stairs(t, omega, 'k');
xlabel('Samples')
ylabel('Omega')
set(gca,'YLim',[0,pi]);
set(gca,'YTick',0:pi/4:pi);
set(gca,'YTickLabel',{'0' 'pi/4','pi/2','3/4pi','pi'});
hold on
plot(t,pred_omega_ekf,'ro');
plot(t,pred_omega_ukf,'bx');
legend('True','EKF','UKF')
RI(ii) = getframe;
end
end
if (PLOT_PREDICTION)
generate_video(strcat('ri_',namestring),RI);
end
save(strcat(logpath,'ri_ekf.mat'),'ri_ekf')
save(strcat(logpath,'ri_ukf.mat'),'ri_ukf')
else
if exist('ri_ekf.mat','file') && exist('ri_ukf.mat','file')
load(strcat(logpath,'ri_ekf.mat'),'ri_ekf')
load(strcat(logpath,'ri_ukf.mat'),'ri_ukf')
else
error('No saved curves. Recompute.')
end
end
n_steps = length(step_profile);
steps_axis = 1:n_steps;
psi_ekf = hist(ri_ekf, steps_axis);
psi_ukf = hist(ri_ukf, steps_axis);
if PLOT_PROFILE
figure(1)
hold off
stairs(omega)
xlabel('Samples')
ylabel('Omega')
set(gca,'YLim',[initial_omega-pi/2,initial_omega+pi/2]);
set(gca,'YTick',0:pi/4:pi);
set(gca,'YTickLabel',{'0' 'pi/4','pi/2','3/4pi','pi'});
end
ri_figure = figure(2);
title('RI')
bar(steps_axis,[psi_ekf', psi_ukf'])
legend('EKF','UKF')
saveas(ri_figure, strcat(logpath,'ri_figure_',namestring,'.png'), 'png');3 运行结果

4 结论
本文讨论了估计嵌入噪声的窄带谐波信号的频率问题;特别是基于卡尔曼滤波器的方法,例如扩展卡尔曼滤波器 (EKF) 和无迹卡尔曼滤波器 (UKF)。为了评估算法实现的估计质量,引入了两个标准:性能指数(PI)和鲁棒性指数(RI),以及辅助收敛比。已对记录的真实世界信号和生成的噪声信号进行了测试。剩余详细文章见第3部分。
部分理论引用网络文献,如有侵权请联系博主删除。
5 参考文献
[1] Corbetta S , Dardanelli A , Boniolo I , et al. Frequency estimation of narrow band signals in Gaussian noise via Unscented Kalman Filter[C]// Proceedings of the 49th IEEE Conference on Decision and Control, CDC 2010, December 15-17, 2010, Atlanta, Georgia, USA. IEEE, 2010.
[2] Dash P K , Hasan S , Panigrahi B K . Adaptive complex unscented Kalman filter for frequency estimation of time-varying signals[J]. Iet Science Measurement Technology, 2010, 4(2):93-103.
[3] S. Bittanti and S. Savaresi. “On the Parameterization and Design of an
Extended Kalman Filter Frequency Tracker”. In: IEEE transactions on
automatic control 45.9 (2000), pp. 1718–1724.
[4] B. Boashash. “Estimating and Interpreting the instantaneous frequency of
a signal”. In: Proceedings of the IEEE 80.4 (1992), pp. 540–568.
[5] S. Savaresi et al. “Frequency estimation of narrow band signals in Gaussian
noise via Unscented Kalman Filter”. In: 49th IEEE Conference on Decision
and Control (2010), pp. 2869–2874.

















 3348
3348











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











