👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
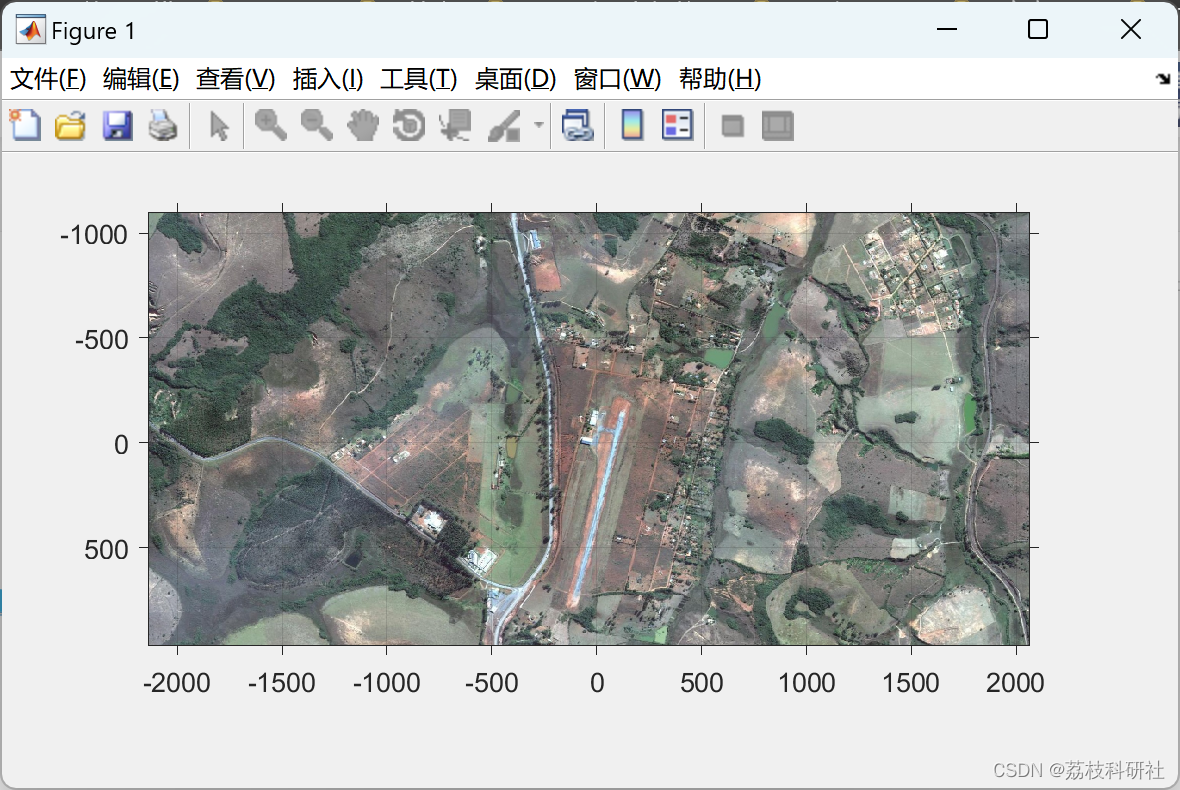
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
文献来源:
摘要:该文提出一种使用一组配备图像传感器的无人驾驶飞行器(UAV)对地面区域进行最小时间覆盖问题的解决方案。该解决方案分为两部分:(i)任务建模为一个图形,其顶点是地理坐标,以确定的方式是单个无人机将在最短的时间内覆盖该区域;(ii)混合整数线性规划问题的解,根据第一部分中定义的图变量制定,以在该区域上空路由无人机团队。与传统车辆路径问题(VRP)解决方案相比,所提方法的主要贡献在于,我们的方法解决了实际无人机执行任务时遇到的一些实际问题。在这一行中,论文的主要贡献之一是通过求解优化问题自动选择用于覆盖该区域的无人机数量。无人机的数量受车辆的最大飞行时间和设置时间的影响,设置时间是准备和发射无人机所需的时间。为了说明该方法,本文介绍了使用两架手动发射的固定翼无人机获得的实验结果。
关键词:
覆盖路径规划;无人机;车辆配送问题
原文摘要:
Abstract
This paper presents a solution for the problem of minimum time coverage of ground areas using a group of unmanned air vehicles (UAVs) equipped with image sensors. The solution is divided into two parts: (i) the task modeling as a graph whose vertices are geographic coordinates determined in such a way that a single UAV would cover the area in minimum time; and (ii) the solution of a mixed integer linear programming problem, formulated according to the graph variables defined in the first part, to route the team of UAVs over the area. The main contribution of the proposed methodology, when compared with the traditional vehicle routing problem’s (VRP) solutions, is the fact that our method solves some practical problems only encountered during the execution of the task with actual UAVs. In this line, one of the main contributions of the paper is that the number of UAVs used to cover the area is automatically selected by solving the optimization problem. The number of UAVs is influenced by the vehicles’ maximum flight time and by the setup time, which is the time needed to prepare and launch a UAV. To illustrate the methodology, the paper presents experimental results obtained with two hand-launched, fixed-wing UAVs.
Keywords:
coverage path planning; UAVs; vehicle routing problem
世界正处于重大突破的边缘,因为我们到达了无人机飞行在世界许多国家受到监管的历史时刻。来自不同领域的公司目前正在使用无人机和传感器技术来获取地面区域的信息,并减少操作的时间和成本。环境监测、搜索和救援、精准农业和监视等应用可能会受益于这种带有机载传感器的无人机的使用,以实现空间覆盖[1,2,3,4]。
这项工作的动机和主要由巴西政府的资助机构FINEP(研究和项目资助机构)资助,涉及空中机器人技术最常见的用途之一,即从地面获取一系列重叠的航空图像。这些图像通常经过后处理,以提取所需信息,例如数字地形图和植被索引。在这种情况下,高效的无人机路径规划算法非常重要,因为从图像中提取的操作时间、成本和信息的质量与这种规划的质量直接相关。我们提出了一种区域覆盖路径规划策略,以考虑多无人机场景获取地面图像。
文献中提出了几种区域覆盖策略。最近对方法的全面调查可以在[5]中找到。绝大多数策略依赖于将目标区域分解为必须访问和覆盖的细胞。例如,Choset [6]提出了一种专门用于覆盖任务的精确细胞分解方法。该方法将空间划分为凸区域,这些区域必须由一系列来回运动覆盖。这些像元被建模为邻接图中的节点,其中边表示两个像元之间存在公共边界。然后,通过首先执行图形搜索来确定应按哪个顺序覆盖单元格来解决覆盖率问题。其次,机器人根据指定的顺序从一个单元移动到另一个单元,在每个单元内执行来回运动以完全覆盖它。Acar等人[7]将这种方法应用于平滑和多边形的工作空间。该算法不是搜索顶点,而是在工作空间中寻找连接性变化。Acar等人[8]使用这种方法,并通过将每个细胞描述为狭窄或巨大来改进它。在巨大的单元中,来回运动像往常一样执行,每个覆盖行的宽度与机器人携带的传感器相关的占地面积大小成正比。另一方面,在狭窄的细胞中,机器人改变其行为并使用其传感器遵循相关的广义Voronoi图(GVD)来覆盖细胞。
前面提到的方法中涉及的唯一优化是选择要遵循的单元格顺序。路径优化的一种简单形式是选择每个单元格中来回移动的方向。这可能会减少路径中的转弯次数,从而减少由于每次转弯而导致的车辆减速和加速的影响[9]。Li等人[10]通过解决细胞之间的连接,将这种方法更进一步。在[10]中,作者能够证明,对于无人机,转弯较少的路径在路线长度,持续时间和能量方面更有效。扫描方向的优化也应用于多无人机系统的上下文中[11]。在这种情况下,目标区域被划分为凸面,并且这些多边形中的每一个都被分配给无人机,无人机负责根据最佳扫描方向遵循来回模式覆盖该区域。
Xu等人[12]提出了一种区域覆盖策略,该策略将Choset [6]的精确单元分解思想与适用于单固定翼无人机操作的覆盖优化方向相结合。由于作者使用图形表示(Reeb graph),其中细胞不是建模为节点,而是建模为图边,因此通过解决所谓的中国邮递员问题 (CPP) 来找到细胞序列,这是一个路由问题,目标是找到最短的游览至少访问每个边缘一次。
一些研究人员专注于考虑多个机器人的解决方案,例如前面提到的[11]中的工作。使用多机器人系统有几个优点,例如由于工作量划分和引入容错而减少任务时间,因为一个机器人可以在发生故障时覆盖最初分配给另一个机器人的区域。在这种情况下,一种常见的方法是将覆盖问题视为车辆配送 (VRP)。
通常,VRP 是查找一组路线的问题,这些路线由一组车辆执行,这些车辆必须访问不同地理位置的一组客户,给定运输道路网络。这些路线必须满足客户对货物的所有需求,满足运营限制,并最小化反映全球运输成本的目标函数[13]。将覆盖问题转换为VRP通常是通过构建图形来实现的,当机器人至少访问一次该图的一组节点或边缘时,就可以达到覆盖率。该行中的不同解决方案至少在以下一个方面有所不同:构建此图的形式,获得覆盖的方式,即必须访问哪些节点或哪些边缘,对机器人施加的操作约束以及要最小化的目标函数。
在[14]中,作者考虑了一个多无人机路由问题,可以对游荡周期进行建模,并处理一般的相对时间约束。在它们的表述中,可以对在给定的时间约束下必须多次访问航点的场景进行建模。多机器人系统的边界覆盖问题在[15]中得到解决。在这种情况下,目标是生成覆盖图形边缘子集而不是图形节点的平衡检查路径。[16]中的工作解决了规划到多个无人机的路线的问题,从所需区域收集的信息量是要最大化的目标函数。信息由安装在无人机上的倒置摄像头获取,信息的计算考虑了捕获图像不同部分的分辨率变化。以兴趣点的空间和时间覆盖为目标的动态车辆路径(建模为图中的节点)是[17]的重点。空间覆盖范围与点分布在该区域上的事实有关,而时间覆盖范围与确定何时必须覆盖点的时间限制有关。环境是动态的,因为目标在空间和时间上都在演变。同时考虑三个相互冲突的目标:(一) 尽量减少行进距离;(二) 最大限度提高满意度,模拟在给定时间窗口内实现目标的必要性;以及(iii)尽量减少无人机的数量。具有多个站点的车辆配送问题是 [18] 中使用的模型。在VRP命名法中,仓库是车辆开始和完成任务的地方。[18]中的目标是最小化每架无人机执行的最长行程,这相当于最小化总任务时间。
本文提出了一种使用多个固定翼无人机对地面区域进行最佳时间覆盖的方法。与其他工作类似,我们通过创建图表并将原始问题转换为车辆路径问题来解决覆盖问题。这项工作的主要贡献是合并了与实际部署相关的特定功能。我们假设一种常见情况,即负责发射和检索无人机的人类操作员数量少于车辆数量。通过定义所谓的设置时间,将其合并到方法中。在某些情况下,设置时间会阻止两架无人机在短时间内发射。这意味着,由于一个操作员不能同时准备多架无人机,因此每架无人机的设置时间是累积的。例如,考虑一个任务,其中一名操作员、两架无人机和设置时间4最小值第一架无人机的飞行前任务将采取4分钟和将采取8第二架无人机的最小值,4其中操作员正在第一架无人机上工作,而第二架无人机处于空闲状态。与[18]类似,在这项工作中,我们的目标是在最短的时间内解决多无人机覆盖任务,本着[17]的相同精神,如果可能的话,使用更少的车辆也是我们的目标。我们的方法会自动根据可用的人类操作员数量找到最佳路线和必要无人机的数量。鉴于对操作员数量的限制,在某些情况下,由于累积设置时间的影响,发射大量无人机可能会对总任务时间产生负面影响。此外,为了减少任务期间的转弯次数,我们还优化了扫描方向,如[9]所示。我们在两个实际飞行器的真实实验中评估了该方法。
📚2 运行结果
部分代码:
function plotUavPath(waypoints)
%plotUavPath Summary of this function goes here
% Detailed explanation goes here
if length(waypoints) > 6
clr = prism(length(waypoints));
else
clr = [1 0 0;
0 1 0;
0 0 1;
1 1 0;
1 0 1;
0 1 1];
end
for k = 1:length(waypoints)
i = 1;
for i = 1:length(waypoints{k})
%pause(0.25);
plot(waypoints{k}(i,1),waypoints{k}(i,2),'o','Color',clr(k,:),...
'LineWidth',4,'MarkerSize',8,'MarkerFaceColor',clr(k,:))
if i > 1
plot(waypoints{k}(i-1:i,1),waypoints{k}(i-1:i,2),'Color',clr(k,:),...
'LineWidth',4);
end
end
end
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
🌈4 Matlab代码实现
























 612
612











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











