









目录
💥1 概述
📚2 运行结果
🎉3 参考文献
👨💻4 Matlab代码
💥1 概述
在本项目中,我们将自动驾驶挑战限制在一维范围内,自动驾驶者的目标是在避免碰撞的同时达到设定速度。
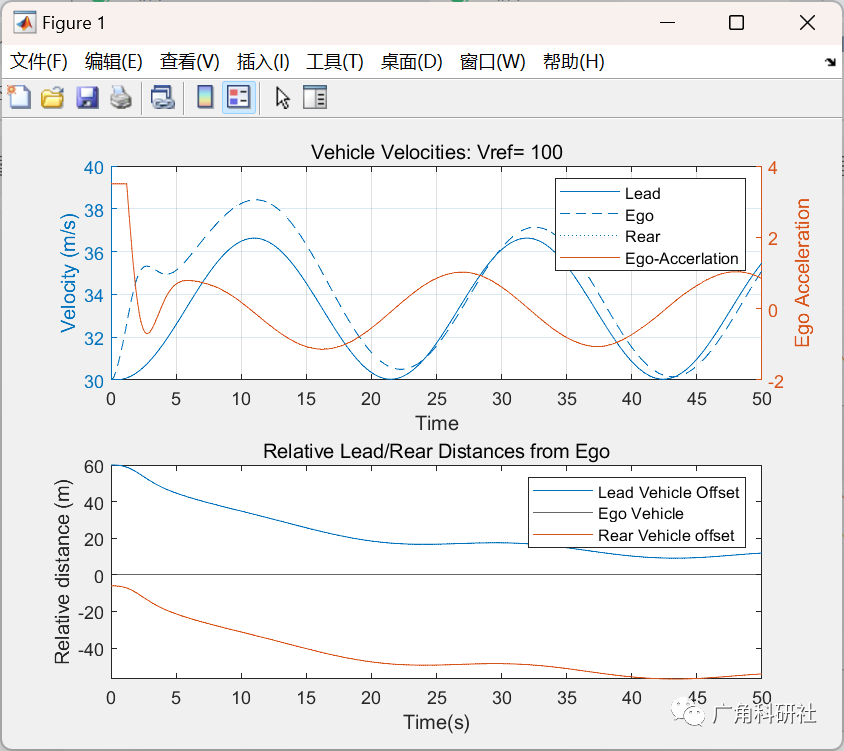
从结果中,我们得出结论,ACC是成功的。在ACC算法下工作的自我车辆适当地应用其最大加速度以避免被追尾。避免碰撞后,可以看到它正试图达到100m/s的设定点,但仅限于前车的位置。
总之,此ACC算法在选择最佳操作之前模拟所有操作的性能。在此模拟期间,算法假设其他代理将在接下来的 N 个时间步长中承诺其速度,并评估 N 个时间步的所有可能操作的状态。一旦通过简单的运动学方程计算出状态,就可以通过沿每个动作的轨迹应用成本函数来评估动作的性能。然后选择与最佳性能(即最低成本)相关的操作。
📚2 运行结果
主函数部分代码:
%% Adaptive Cruise Control System
% Define the sample time, |Ts|, and simulation duration, |T|, in seconds
close all;clear;
Ts = 0.05;
T = 50;
%Define human driver's freq & amplitude of acccel
HA=2;
HF=0.4; %Radians
%%
% Specify the linear model for ego car.
G_ego = tf(1,[0.5,1,0]);
%%
vref=21;L_RDis=7;L_Vel=26.8;R_RDis=20;R_Vel=30;
% Specify the initial position and velocity for the two vehicles.
x0_lead = 80; % initial position for lead car (m)
v0_lead = 30; % initial velocity for lead car (m/s)
x0_ego = 20; % initial position for ego car (m)
v0_ego = 30; % initial velocity for ego car (m/s)
x0_rear = 14; % initial position for rear car (m)
v0_rear = 30; % initial velocity for rear car (m/s)
%%
% Specify the driver-set velocity in m/s.
v_set = 100;
%% Simulation Analysis
% Run the simulation.
sim('ACCsystem.slx')
%%
figure(1);subplot(211);
yyaxis left
plot(Lv);hold on
plot(Ev);
plot(Rv);
grid on;
title(['Vehicle Velocities: Vref= ',num2str(v_set) ])
xlabel('Time')
ylabel('Velocity (m/s)')
yyaxis right
plot(Ea); hold off
ylabel('Ego Acceleration')
legend('Lead','Ego','Rear','Ego-Accerlation')
%% Plot Relative Distances
subplot(212)
plot(Ep.Time,Lp.Data-Ep.Data);hold on
yline(0);
plot(Ep.Time,Rp.Data-Ep.Data);
hold off
title('Relative Lead/Rear Distances from Ego')
xlabel('Time(s)')
ylabel('Relative distance (m)')
legend('Lead Vehicle Offset','Ego Vehicle','Rear Vehicle offset')
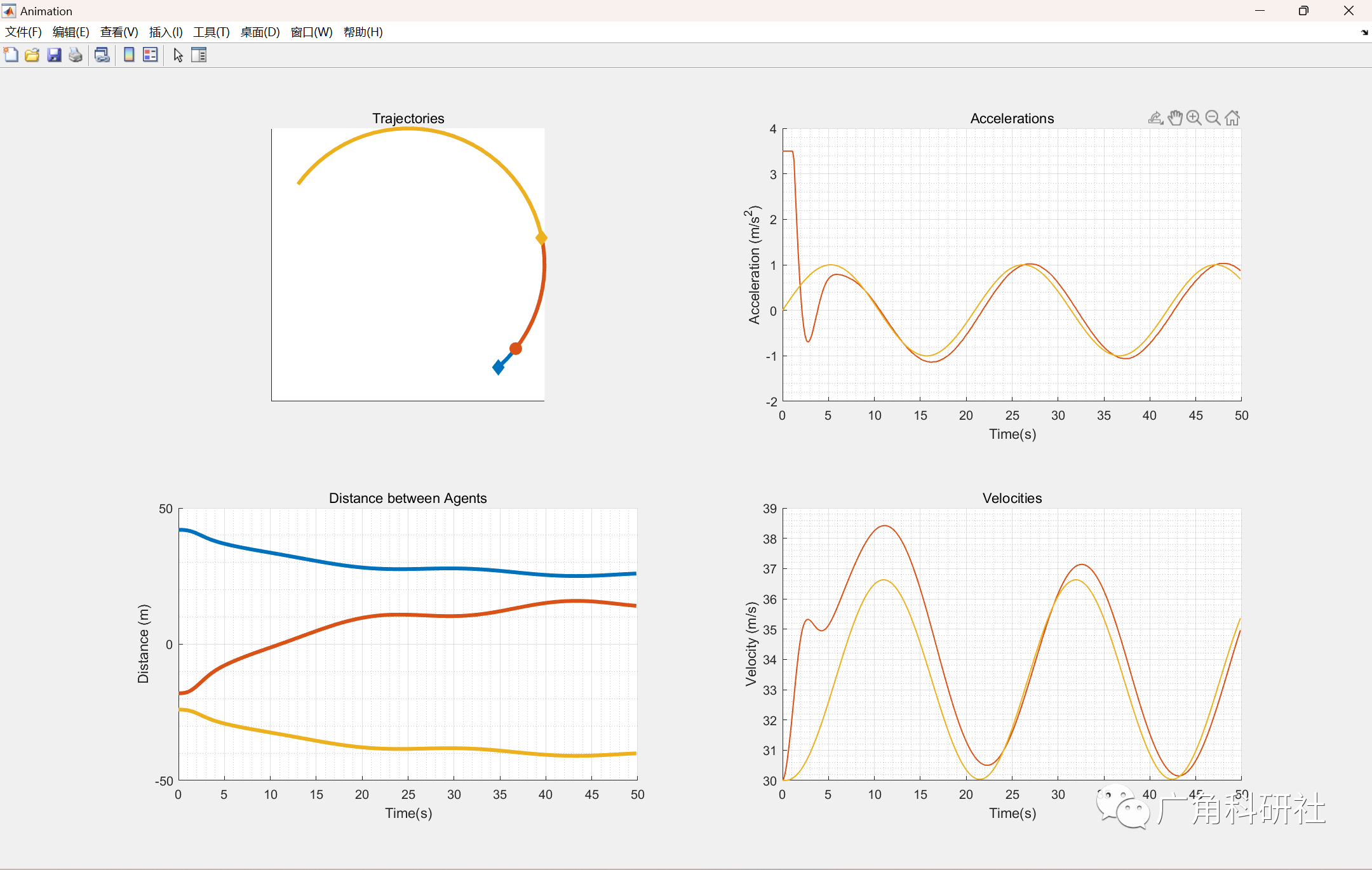
%% Circular Plot
%X,V,A
X=[Lp.Data';Ep.Data';Rp.Data'];
V=[Lv.Data';Ev.Data';Rv.Data'];
A=[La.Data';Ea.Data';Ra.Data'];
N=3; %Number of Players
Nh = 2; %Number of Humans
iH = [1,3]; %Position of Humans
R = 1000; %Radius of Circle
eV=0.05;
K=T/Ts;
%Video initialization
myVideo = VideoWriter('ACC_Demo'); %open video file
myVideo.FrameRate = 10; %can adjust this, 5 - 10 works well for me
open(myVideo)
dW = N*pi/(eV*N);
XC = @( x ) R*sin( x/dW );
YC = @( x ) R*cos( x/dW );
COLORS = { [0 0.4470 0.7410], [0.8500 0.3250 0.0980], [0.9290 0.6940 0.1250],...
[0.4940 0.1840 0.5560], [0.4660 0.6740 0.1880], [0.3010 0.7450 0.9330],...
[0.6350 0.0780 0.1840] };
NAMES = {'Trajectories', 'Accelerations', 'Distance between Agents', 'Velocities'};
XLAB = {'','Time(s)','Time(s)','Time(s)'};
YLAB = {'','Acceleration (m/s^2)','Distance (m)','Velocity (m/s)'};
figure('Name','Animation','NumberTitle','off','WindowState','maximized')
for k = 1:4
ax(k) = subplot(2,2,k);
title( NAMES{k} );
xlabel( XLAB{k} );
ylabel( YLAB{k} );
hold on
grid on
grid minor
end
🎉3 参考文献
[1]戴旭彬,孙涛,夏维.基于MPC的自适应巡航算法改进研究[J].机电工程,2018,35(06):644-648+657.
部分理论引用网络文献,若有侵权联系博主删除。
















 6802
6802











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











