






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
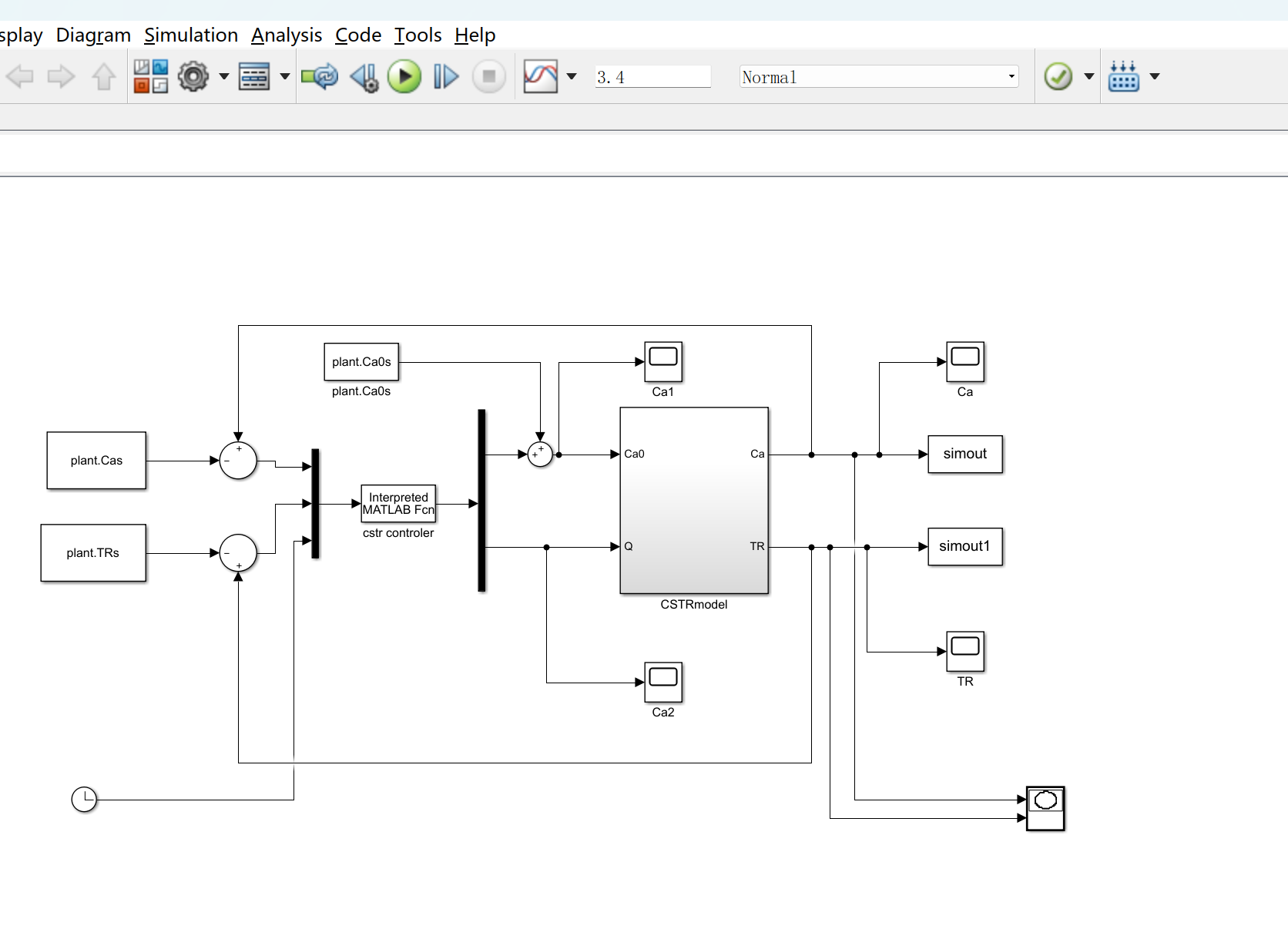
CSRT系统是一种常用的目标跟踪算法,其主要思想是通过对目标的搜索、分类、识别和跟踪等关键环节的实时优化,实现对目标的高效跟踪。而基于非线性模型控制(Model Predictive Control, MPC)的控制方法,可以实现对控制系统的优化控制,提高其稳定性和鲁棒性。
因此,基于非线性MPC的CSRT系统应用研究,可以探究如何将两种方法结合起来,实现对跟踪系统的优化控制。具体而言,可以涉及以下几个方面:
1. 模型建立:建立跟踪系统的非线性模型,包括目标的运动模型、环境噪声等,以及MPC控制器的模型。
2. 控制策略设计:设计基于MPC的控制策略,针对跟踪系统的特点和要求,优化控制对象,实现更准确、更鲁棒的目标跟踪。
3. 利用MPC进行目标状态估计:对于跟踪系统,对目标的状态估计是非常关键的环节。利用MPC方法,可以通过迭代求解优化问题来实现对目标状态的预测和估计。
4. 评估系统性能:利用模拟实验或实际实验对非线性MPC-CSRT系统进行性能评估,包括控制系统的稳定性、鲁棒性和跟踪精度等。
基于非线性模型控制的CSRT系统应用研究可以实现对跟踪系统的优化控制,提高其目标跟踪的稳定性和精度,同时也为将来更广泛的跟踪系统研究提供了新的思路和方法。
📚2 运行结果
子函数代码:
function [sal]=cstrlbc(ent)
global plant ;
syms x1;
syms x2;
P=plant.P;
F=plant.F;
V=plant.V;
k0=plant.k0;
E=plant.E;
TA0=plant.TA0s;
dH=plant.dH;
R=plant.R;
Cp=plant.Cp;
RR=plant.RR;
TRs=plant.TRs;
Cas=plant.Cas;
Ca0s=plant.Ca0s;
umax=plant.umax;
o=plant.o;
x=[x1;x2];
%Vx=x'*P*x;
Vx=9.35*x1^2+0.02*x2^2+0.82*x1*x2;
f=[-(F/V)*(x1+Cas-Ca0s)-k0*exp(-E/((TRs+x2)*R))*(x1+Cas);-(F/V)*(x2+TRs-TA0)+(-dH*k0)/(RR*Cp)*exp(-E/((TRs+x2)*R))*(x1+Cas)];
%f=[-(F/V)*x1-k0*exp(-E/(TRs*R))*x1;-(F/V)*x2+(-dH*k0)/(RR*Cp)*exp(-E/(TRs*R))*x1];
G=[F/V,0;0,1/(RR*Cp*V)];
lfv=[diff(Vx,'x1',1),diff(Vx,'x2',1)]*f+o*Vx;
LGV1=[diff(Vx,'x1',1),diff(Vx,'x2',1)]*G(:,1);
LGV2=[diff(Vx,'x1',1),diff(Vx,'x2',1)]*G(:,2);
x1=ent(1);
x2=ent(2);
LGV=norm([eval(LGV1),eval(LGV2)]);
lfv=eval(lfv);
if(LGV~=0)
k=-(lfv+sqrt(lfv^2+(umax*LGV)^4))/(LGV^2*(1+sqrt(1+(umax*LGV)^2)));
%k=0
else
k=0;
end
sal(1)=k*eval(LGV1);
sal(2)=k*eval(LGV2);function [sal]=cstrlbc(ent)
global plant ;
syms x1;
syms x2;
P=plant.P;
F=plant.F;
V=plant.V;
k0=plant.k0;
E=plant.E;
TA0=plant.TA0s;
dH=plant.dH;
R=plant.R;
Cp=plant.Cp;
RR=plant.RR;
TRs=plant.TRs;
Cas=plant.Cas;
Ca0s=plant.Ca0s;
umax=plant.umax;
o=plant.o;
x=[x1;x2];
%Vx=x'*P*x;
Vx=9.35*x1^2+0.02*x2^2+0.82*x1*x2;
f=[-(F/V)*(x1+Cas-Ca0s)-k0*exp(-E/((TRs+x2)*R))*(x1+Cas);-(F/V)*(x2+TRs-TA0)+(-dH*k0)/(RR*Cp)*exp(-E/((TRs+x2)*R))*(x1+Cas)];
%f=[-(F/V)*x1-k0*exp(-E/(TRs*R))*x1;-(F/V)*x2+(-dH*k0)/(RR*Cp)*exp(-E/(TRs*R))*x1];
G=[F/V,0;0,1/(RR*Cp*V)];
lfv=[diff(Vx,'x1',1),diff(Vx,'x2',1)]*f+o*Vx;
LGV1=[diff(Vx,'x1',1),diff(Vx,'x2',1)]*G(:,1);
LGV2=[diff(Vx,'x1',1),diff(Vx,'x2',1)]*G(:,2);
x1=ent(1);
x2=ent(2);
LGV=norm([eval(LGV1),eval(LGV2)]);
lfv=eval(lfv);
if(LGV~=0)
k=-(lfv+sqrt(lfv^2+(umax*LGV)^4))/(LGV^2*(1+sqrt(1+(umax*LGV)^2)));
%k=0
else
k=0;
end
sal(1)=k*eval(LGV1);
sal(2)=k*eval(LGV2);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]陈炯德,王子轩,姚晔,等.变风量空调系统用非线性模型预测控制方法研究[J].制冷学报, 2019, 40(6):8.DOI:CNKI:SUN:ZLXB.0.2019-06-009.
[2]丁琳,刘清.基于非线性模型的船舶操纵运动的模糊控制系统研究[C]//系统仿真技术及其应用学术会议.2001.
[3]吴兵.非线性系统多模型操作空间划分与最优控制一体化研究[D].浙江大学[2023-10-27].

















 6604
6604











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











