






👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
基于模型预测控制(Model Predictive Control, MPC)的无人机路径规划是一种前沿的控制和优化方法,旨在实时地对无人机进行路径规划和控制。MPC 的核心思想是通过在预测的时间窗内优化目标函数,根据当前状态和未来一段时间的行为来做出决策。这种方法在处理动态环境和复杂约束时非常有效。以下是对基于 MPC 的无人机路径规划研究的几个关键方面和步骤的详细说明:
1. 问题定义
无人机路径规划问题可以定义为在给定的初始位置和目标位置之间确定一条时间最优、能量最优或其他优化标准的路径,这条路径还需满足诸如避障、碰撞检测、飞行约束以及动力学限制等一系列约束条件。
2. 模型预测控制简介
MPC 是一种基于优化的控制策略,其基本思想是通过解决一系列在线优化问题来确定控制输入。具体包括:
- **预测模型**:描述无人机的动力学和运动学行为。
- **成本函数**:反映路径规划目标,如时间最短、能量最小或者路径平滑度等。
- **约束条件**:包括物理约束(速度、加速度、转角等)和环境约束(避障、区域限制等)。
3. 系统建模
动力学建模
无人机的运动学和动力学模型是路径规划的基础。常用的运动学模型包括四旋翼无人机的六自由度(6-DOF)模型,描述位置、速度、加速度、姿态角等参数。
\[
\begin{cases}
\dot{x} = v_x \\
\dot{y} = v_y \\
\dot{z} = v_z \\
\dot{v_x} = a_x \\
\dot{v_y} = a_y \\
\dot{v_z} = a_z \\
\end{cases}
\]
传感模型
包括 GPS、IMU、激光雷达等传感器的数据获取和处理,以提供实时的位置信息和环境数据。
4. MPC 控制器设计
优化问题构建
在每个时刻,MPC 通过解以下优化问题来决定控制输入:
\[
\min_{u} \sum_{k=0}^{N} L(x_k, u_k) + L_f(x_{N+1})
\]
其中 \(L\) 是阶段成本函数,\(L_f\) 是终端成本函数,\(x_k\) 和 \(u_k\) 分别是状态和控制输入,\(N\) 是预测时域的长度。
实时求解
使用高效的优化算法(如梯度下降、牛顿法、内点法等)实时求解上述优化问题。
5. 路径规划策略
#### 避障策略
基于传感器数据实时更新障碍物信息,并通过约束条件(如障碍物边界)对MPC 优化问题施加限制,确保无人机能够规避静态和动态障碍物。
目标跟踪
通过定义目标位置作为参考轨迹,使用 MPC 提供的控制输入不断引导无人机沿预定义轨迹飞行。
6. 仿真与验证
仿真平台
利用 MATLAB/Simulink 或 ROS+Gazebo 等仿真平台,构建无人机和环境的仿真模型,测试和验证路径规划算法的性能。
性能指标
评价指标包括路径优化程度(长度、时间、能耗等)、避障效果(安全距离、避障成功率等)、计算效率(实时性、计算开销等)。
7. 实验与应用
实验验证
在实际无人机平台上进行实验验证,包括飞行测试和传感器融合,以确保控制算法在真实环境中的有效性。
应用场景
无人机路径规划的实际应用包括物流运输、环境监测、搜索救援、农业巡检等领域。
总结
基于MPC的无人机路径规划研究具有重要的理论意义和实践价值。它不仅提高了无人机在复杂环境下的自主飞行能力,还为无人机的广泛应用提供了可靠的控制方法。通过持续优化和改进该算法,可进一步提升无人机路径规划的精度、效率和安全性。
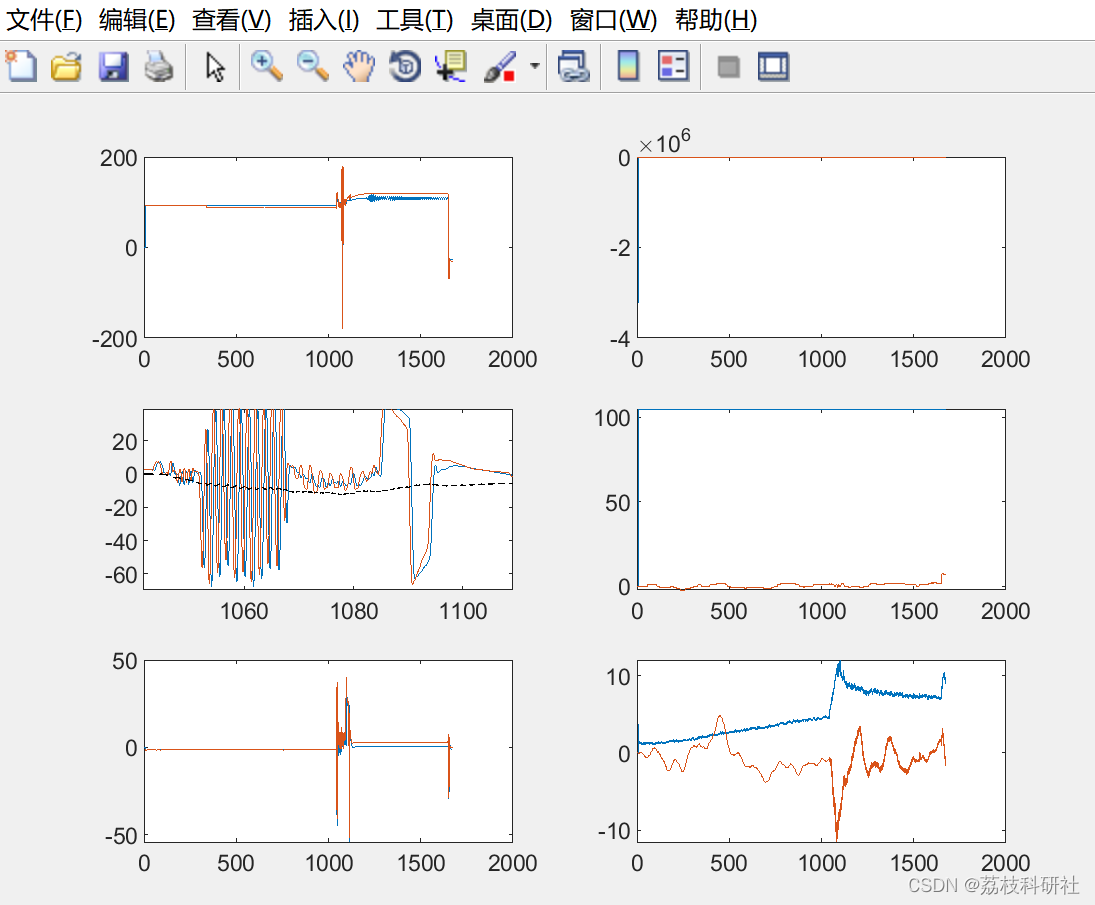
📚2 运行结果
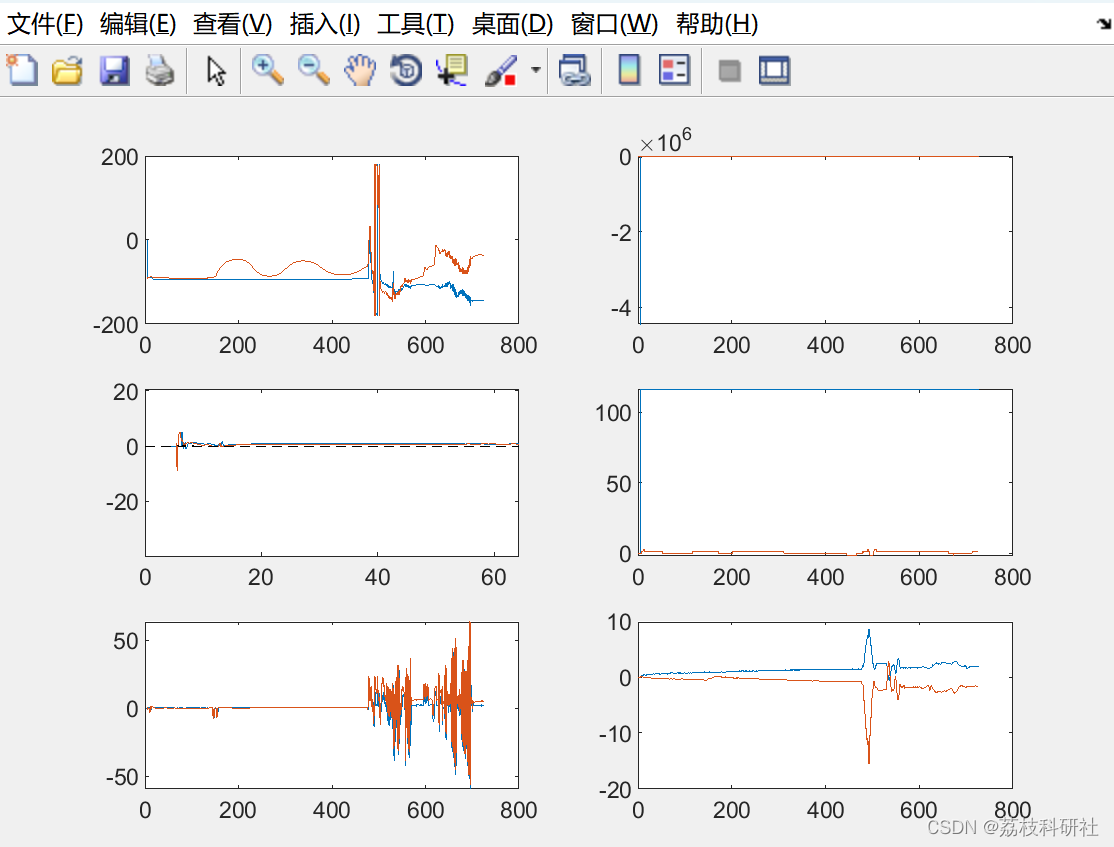
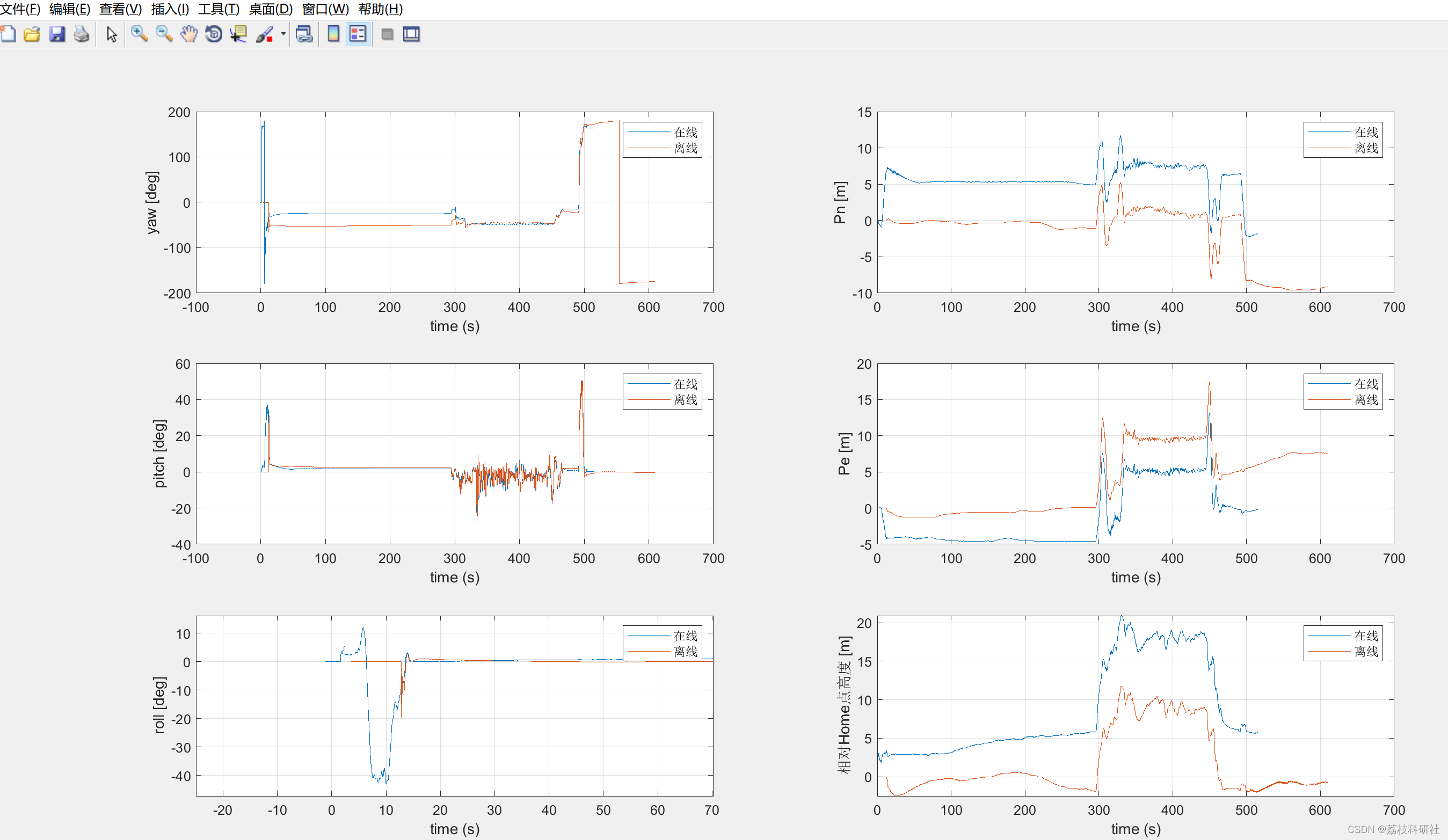
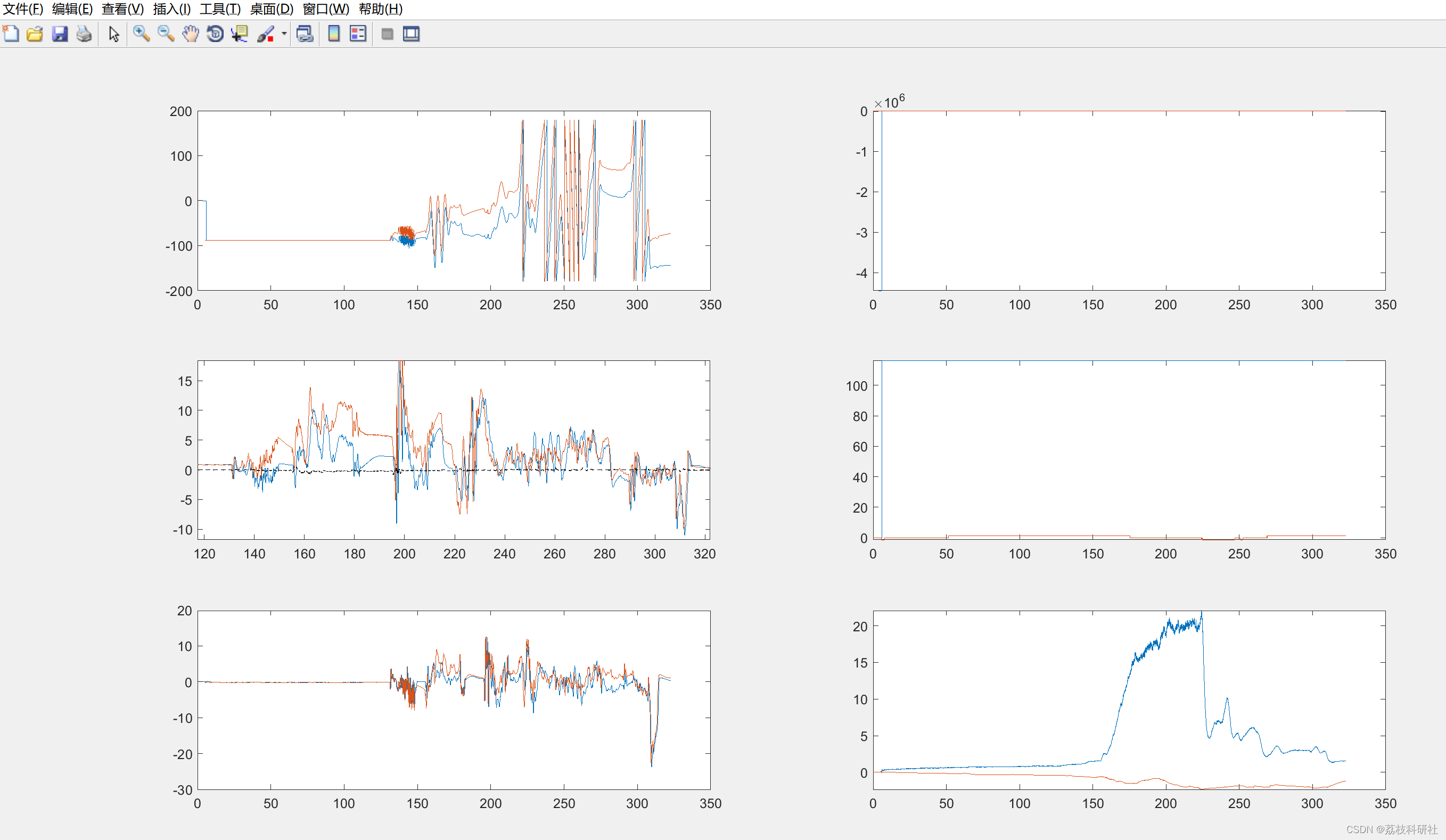
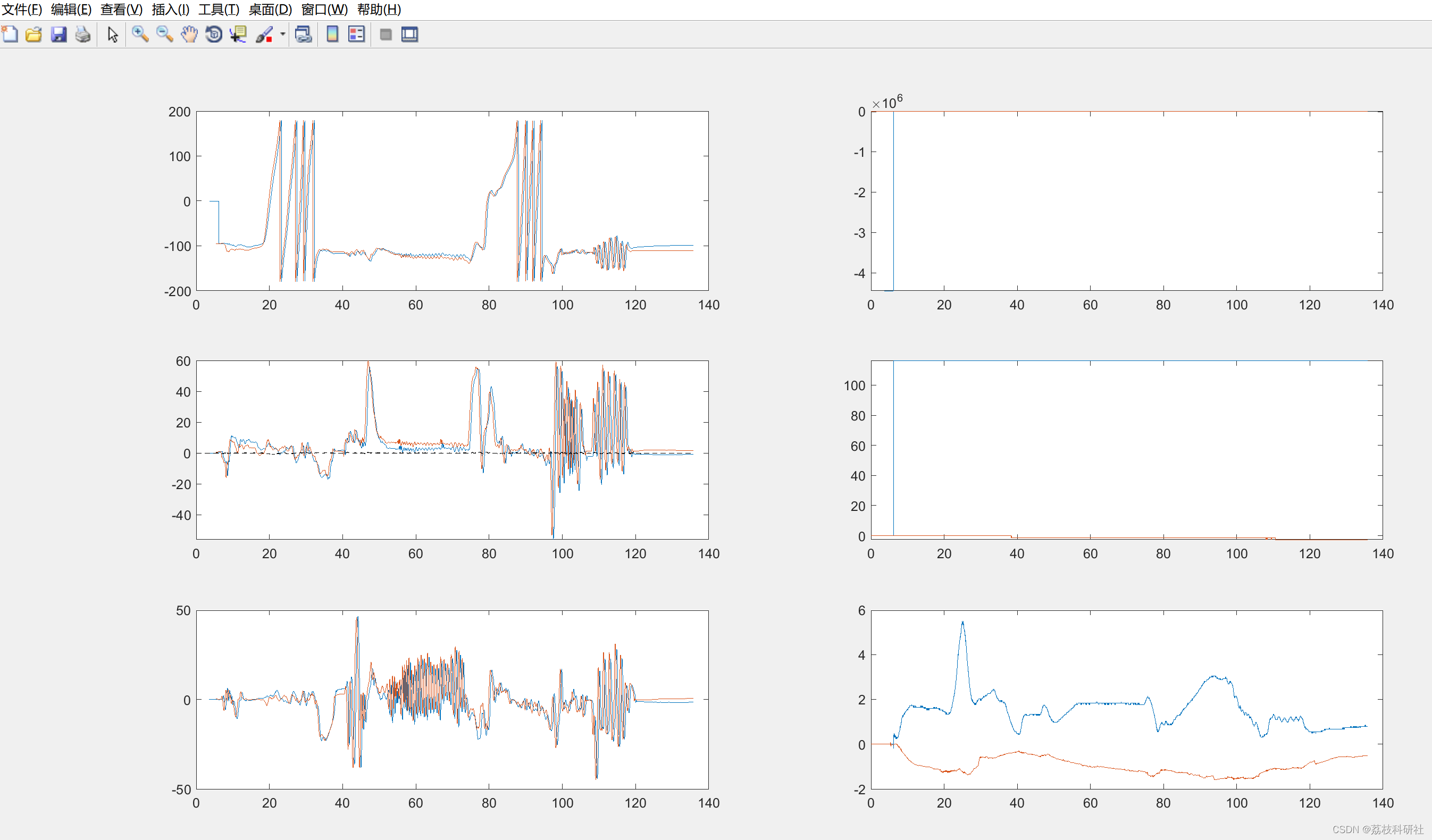
 部分代码:
部分代码:
%%
%% 无人机参数
UAVPARAM_SET.euler0_roll_pitch_yaw = [0,0,0*45]*pi/180;
UAVPARAM_SET.gpsvel0 = [0,0,0]; % m/s
UAVPARAM_SET.mag_NED = [0.2838,-0.03464,0.4595]; %[0.22, 0, 0.42];%
UAVPARAM_SET.refloc = [39,117,0]; % lat lon alt
UAVPARAM_SET.mass = 4.957; % kg
UAVPARAM_SET.inertia = 1e-6*[...
186222 564 8670;
564 164400 -31;
8670 -31 336920;]; % kgm^2
UAVPARAM_SET.designCenter = [-0.3,0,0]; % 设计中心位置 机体坐标系(原点在机头)
UAVPARAM_SET.pressureCenter = [-0.32,0,0]; % 全机压力中心 机体坐标系(原点在机头)
UAVPARAM_SET.gravityCenter = UAVPARAM_SET.designCenter + 1e-3*[0*0.395,0*0.664,19.338]; % 全机重心 机体坐标系(原点在机头)
UAVPARAM_SET.S = 0.316; % 有效面积 1787727e-6 ?
UAVPARAM_SET.meanAerodynamicChord = 0.5; % 平均气动弦长
UAVPARAM_SET.wingspan = 1.86; % 翼展
% 气动参数
UAVPARAM_SET.AeroParam.CY_beta = -1; % 侧向力/beta 1/rad
UAVPARAM_SET.AeroParam.CY_rudder = 1; % 侧向力/rudder 1/rad
UAVPARAM_SET.AeroParam.Cl_beta = 0; % 滚转力矩/beta 1/rad
UAVPARAM_SET.AeroParam.Cl_aileron = -1; % 滚转力矩/aileron 1/rad
UAVPARAM_SET.AeroParam.Cl_rudder = 1; % 滚转力矩/rudder 1/rad
UAVPARAM_SET.AeroParam.Cl_p = -1; % 滚转力矩/p 1/(rad/s)
UAVPARAM_SET.AeroParam.Cl_r = 0; % 滚转力矩/p 1/(rad/s)
UAVPARAM_SET.AeroParam.Cn_beta = 0; % 偏航力矩/beta 1/rad
UAVPARAM_SET.AeroParam.Cn_rudder = -1; % 偏航力矩/rudder 1/rad
UAVPARAM_SET.AeroParam.Cn_aileron = 0; % 偏航力矩/aileron 1/rad
UAVPARAM_SET.AeroParam.Cn_p = 0; % 偏航力矩/p 1/(rad/s)
UAVPARAM_SET.AeroParam.Cn_r = -1; % 偏航力矩/r 1/(rad/s)
UAVPARAM_SET.AeroParam.CD0 = 2; % 零攻角阻力
UAVPARAM_SET.AeroParam.CD_alpha = 1; % 阻力/alpha 1/rad
UAVPARAM_SET.AeroParam.CL0 = 2; % 零攻角升力
UAVPARAM_SET.AeroParam.CL_alpha = 1; % 升力/alpha 1/rad
UAVPARAM_SET.AeroParam.CL_elevator = 1; % 升力/elevator 1/rad
UAVPARAM_SET.AeroParam.Cm0 = 0; % 零攻角俯仰力矩
UAVPARAM_SET.AeroParam.Cm_alpha = -1; %
UAVPARAM_SET.AeroParam.Cm_elevator = -1; %
UAVPARAM_SET.AeroParam.Cm_q = -1;
%%
ENVIRONMENT_SET.windVel = 3; % m/s
ENVIRONMENT_SET.windAngle = 0; % deg
ENVIRONMENT_SET.gravity = [0;0;9.81]; % m/s^2
%%
% 升降舵
ACTUATOR_SET.elevator.naturalFreq = 35*180/pi; % rad/s
ACTUATOR_SET.elevator.dampingRatio = 0.7;
ACTUATOR_SET.elevator.def_max = 40*pi/180;
ACTUATOR_SET.elevator.def_min = -40*pi/180;
ACTUATOR_SET.elevator.rateLimit = 500*pi/180;
ACTUATOR_SET.elevator.initialPos = 0;
% 方向舵
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]宝胜,无人机研究.
[2] 王晓海,孟秀云,李传旭.基于MPC的无人机航迹跟踪控制器设计[J].系统工程与电子技术,2021,43(01):191-198.
[3]刘斐. 基于模型预测控制的无人机轨迹跟踪方法研究[D].湖北工业大学,2017.

















 1488
1488











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











