







第一节:从高斯分布到信息矩阵

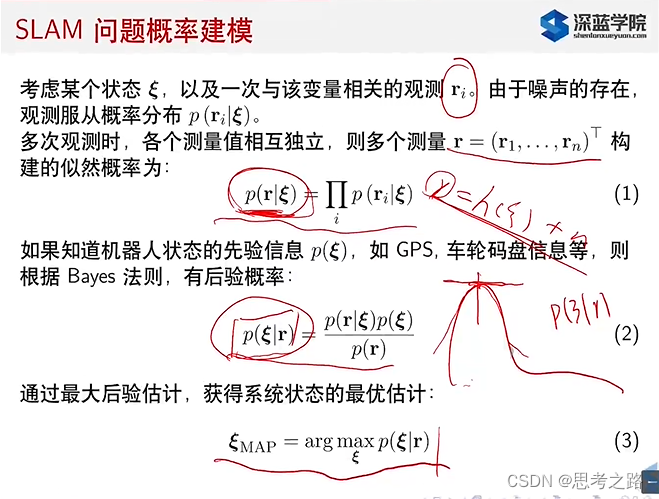
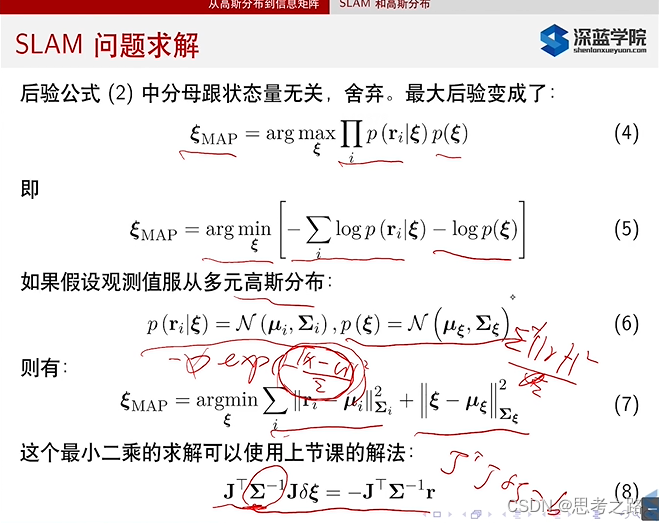
SLAM为什么使用最小二乘?本讲来看它的由来。
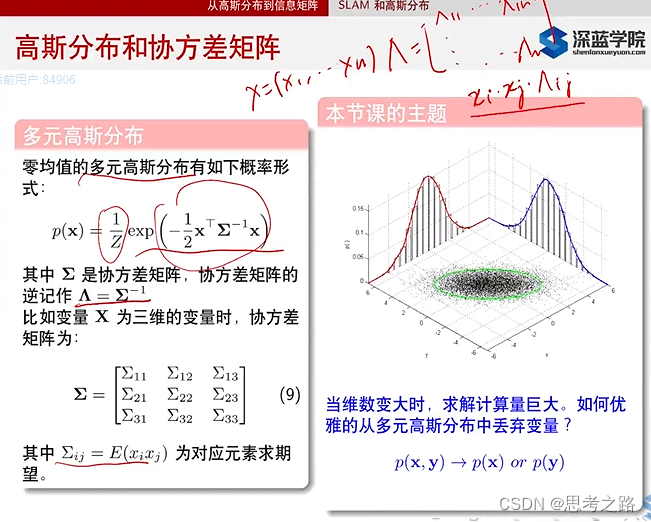
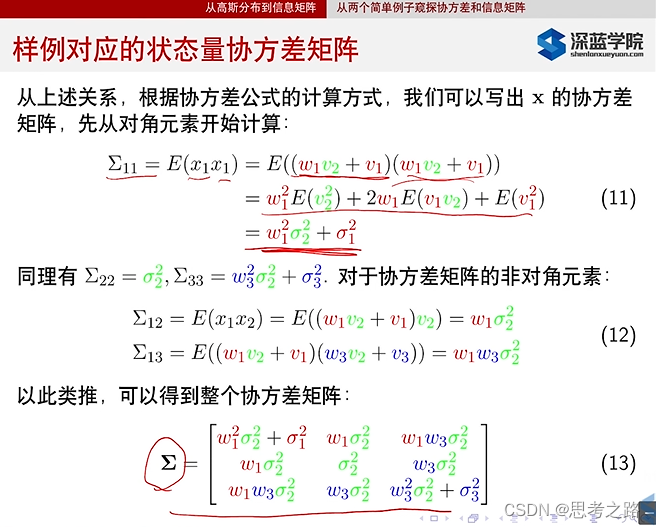
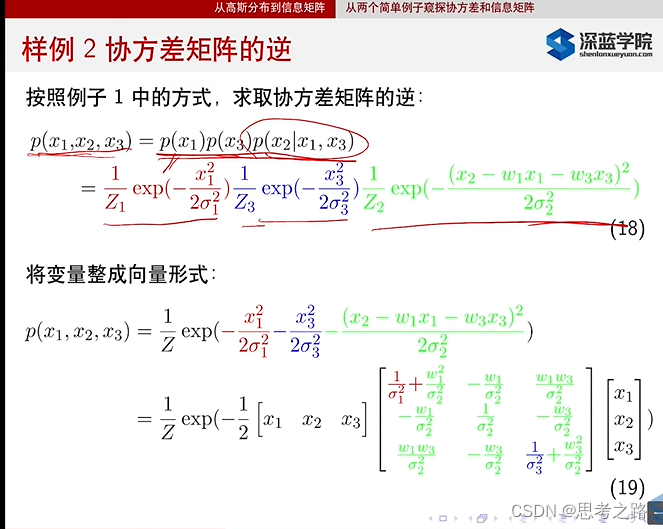
∑
−
1
\sum^{-1}
∑−1放到EKF中相当于噪声矩阵Q,R,表示每次观测的有多准。

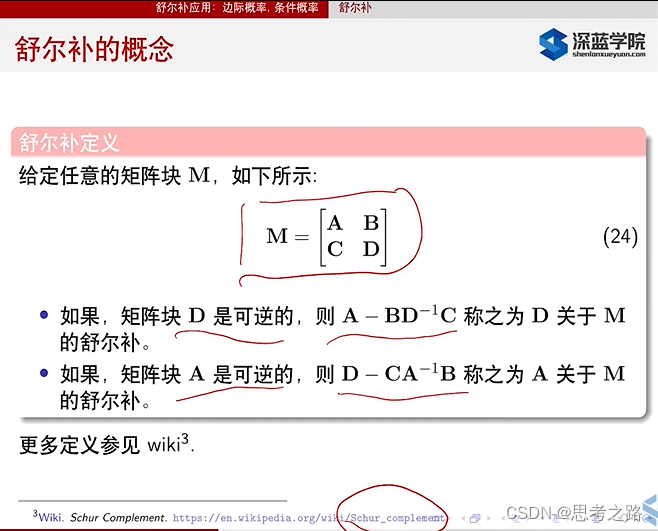
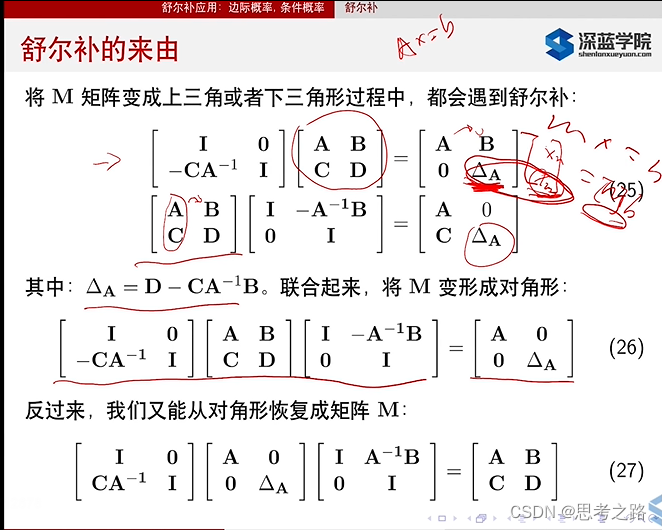
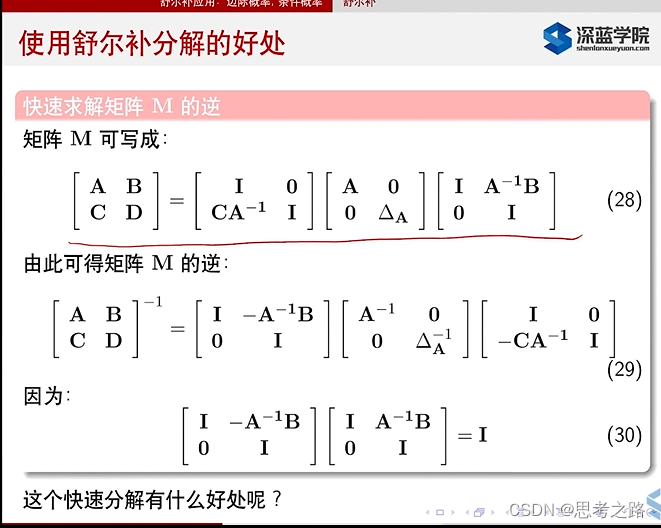
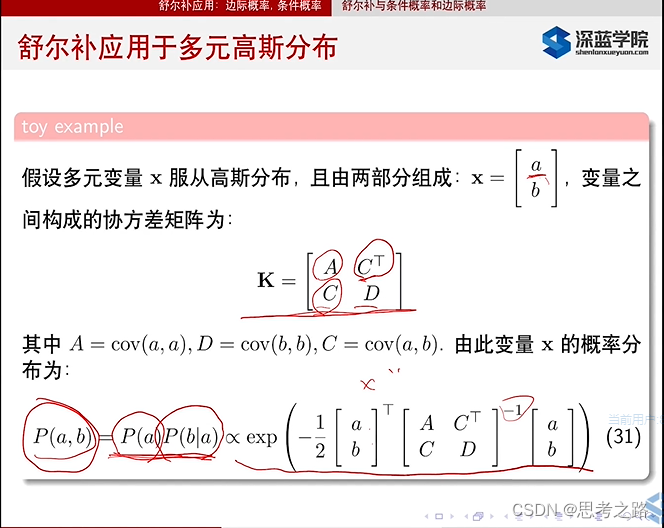
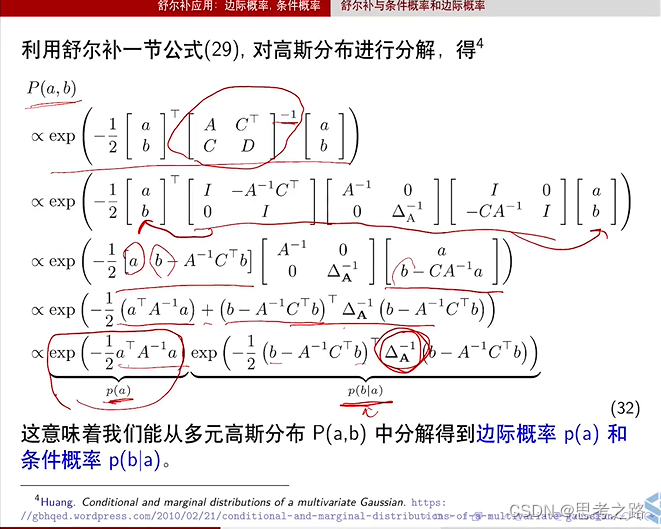
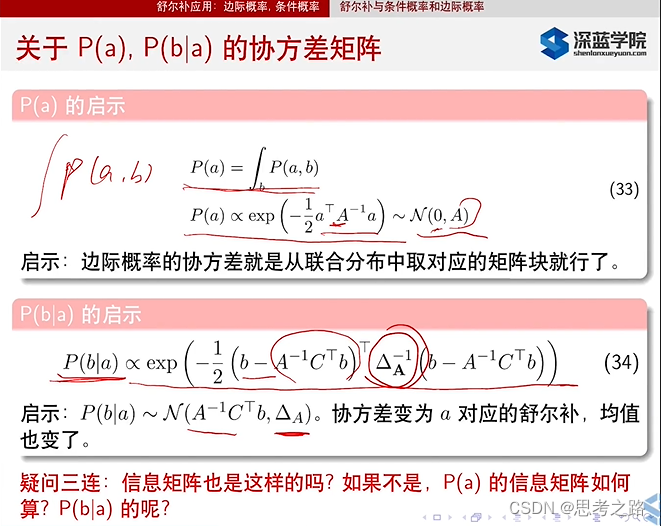
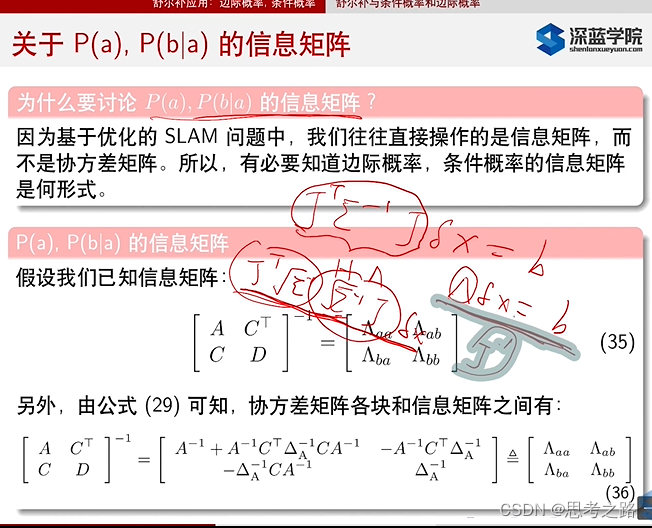
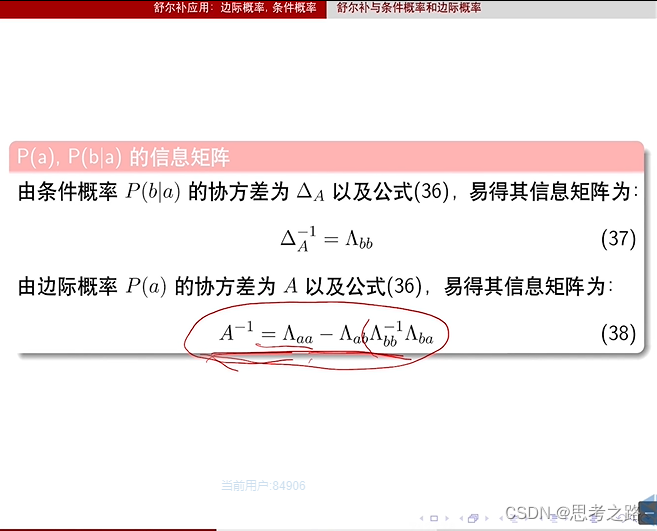
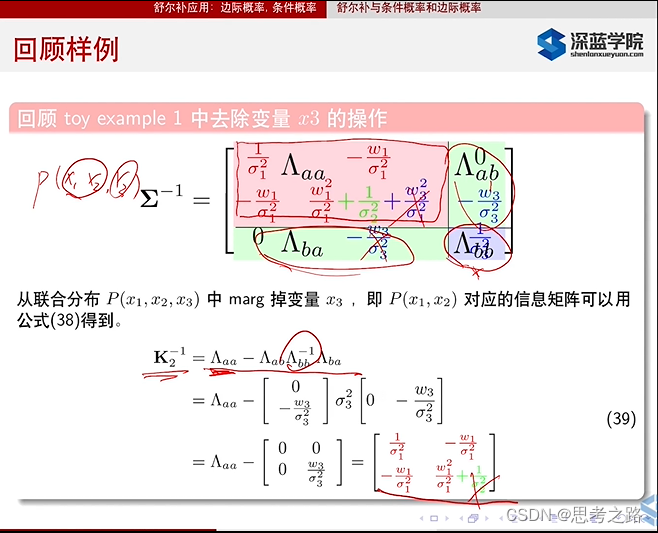
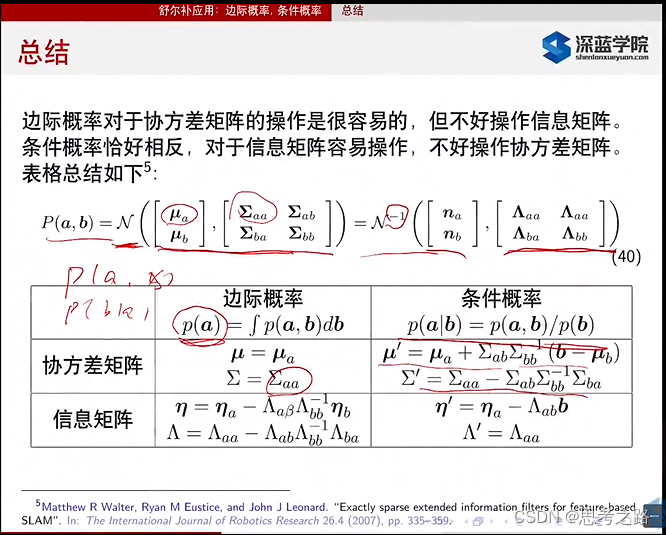
第二节:舒尔补应用:边际概率,条件概率
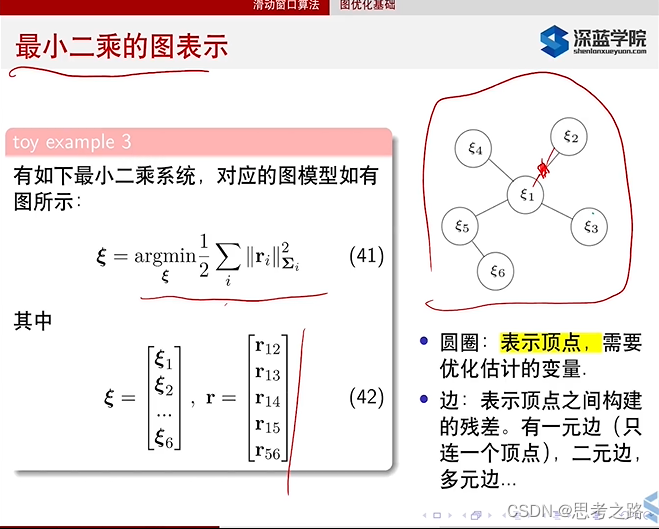
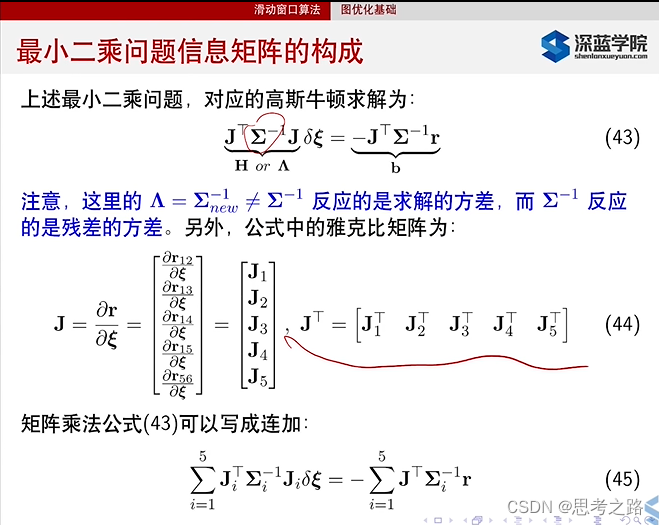
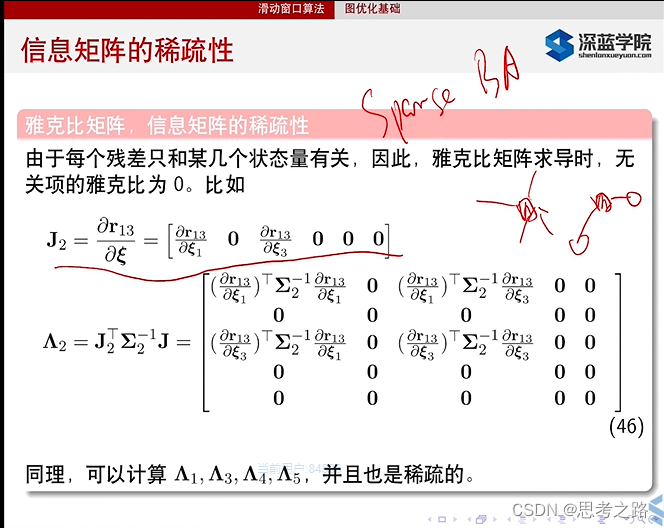
第三节:滑动窗口算法:图优化基础,基于边际概率的滑动窗口算法
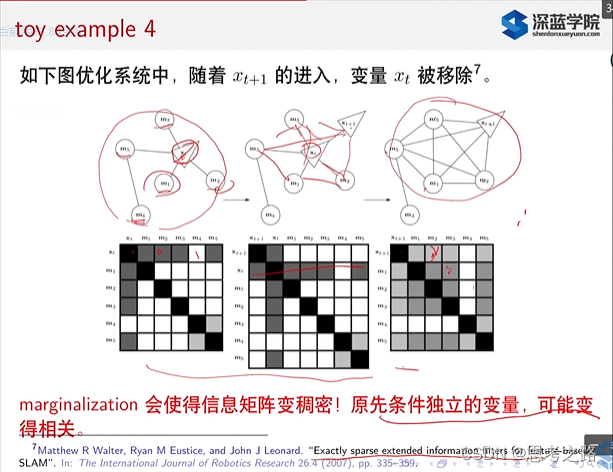
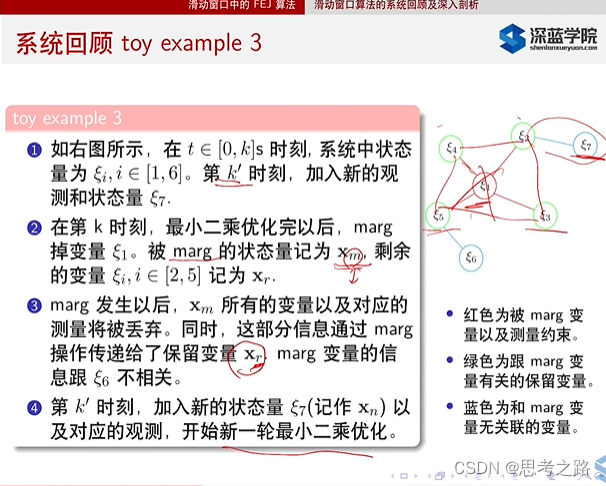
如果我们要marginalization掉最开始的cmaera1,若加入的新的camear能够观测到camera1观测到的路标点,此时需要将该路标点在camera1处的观测保留。
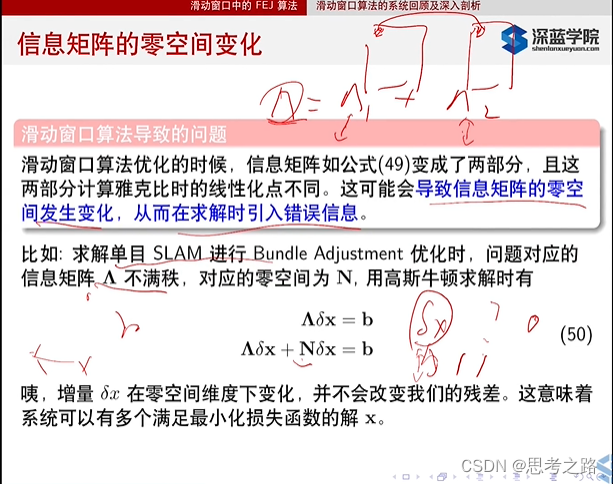
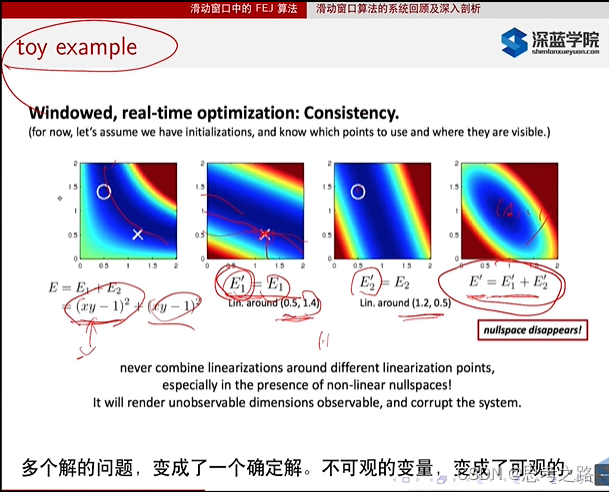
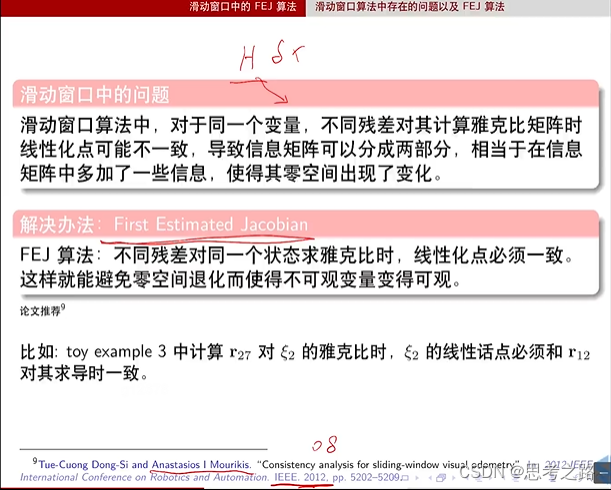
第四节:滑动窗口中的FEJ算法
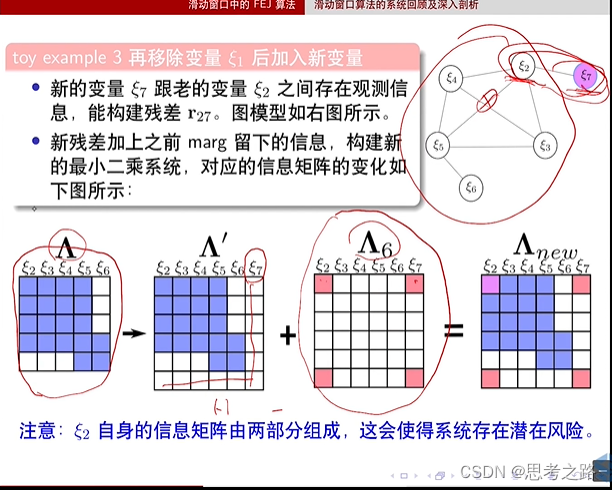
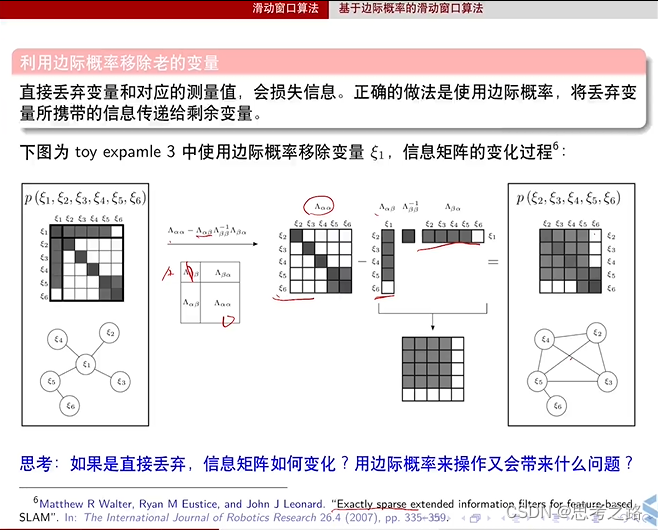
上图中的新的信息矩阵中
ξ
2
\xi_2
ξ2由两部分组成,即以前老的被边缘化的误差对它状态量的雅可比导数,另一部分是新的观测残差对它状态量求导。
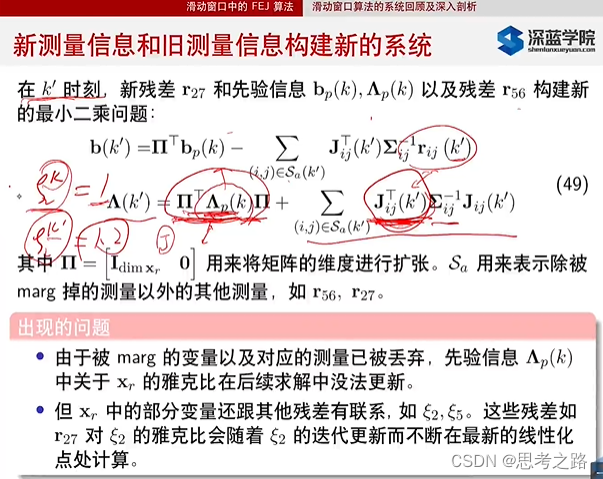
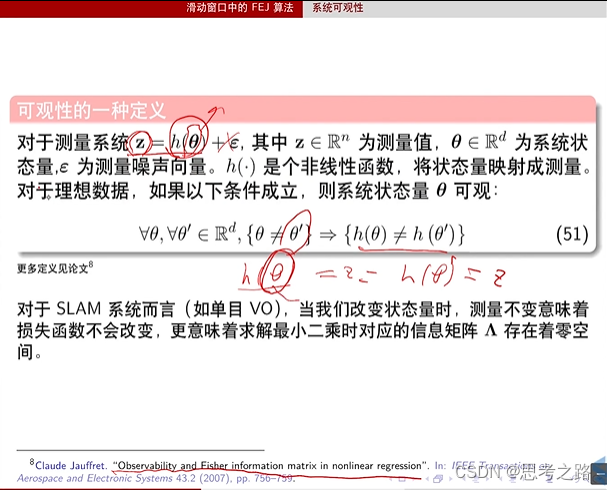
6自由度不客观:把整个观测的坐标系进行平移或旋转,变换到另一个地方,测量还是一样的,没有绝对的坐标系。
尺度不客观:将相机间的平移量(尺度)进行缩放,测量值仍然不变















11-03
 442
442
442
07-18
176
176
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









