









slam的分类:静态的slam和动态的slam.
绝大多数的slam假设的环境都是静态的,即在建图或导航的过程中环境是不会发生改变的。
动态slam中又分为高动态环境和低动态环境。
高动态环境:机器人运动的视野范围内能看到运动的物体。
低动态环境:环境也会发生变化,但机器人是看不到的。
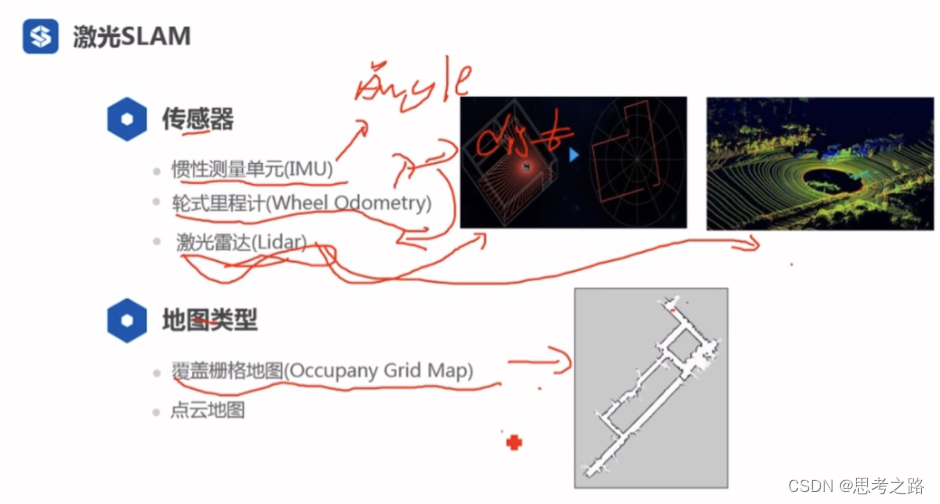
机器人在静态环境下根据slam的输出过程构建的地图可以分为三种: 尺度地图,拓扑地图,混合地图.
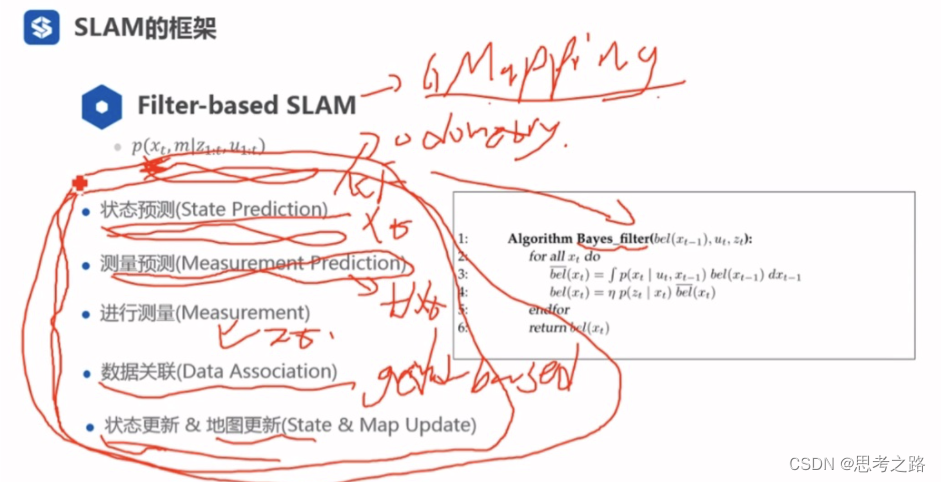
尺度地图:gamp建立的地图是尺度地图,尺度不是真实的,实现方式分为两种:基于贝叶斯的和基于图优化的。
拓扑地图:适用于环境比较大的地方
混合地图:两者的混合
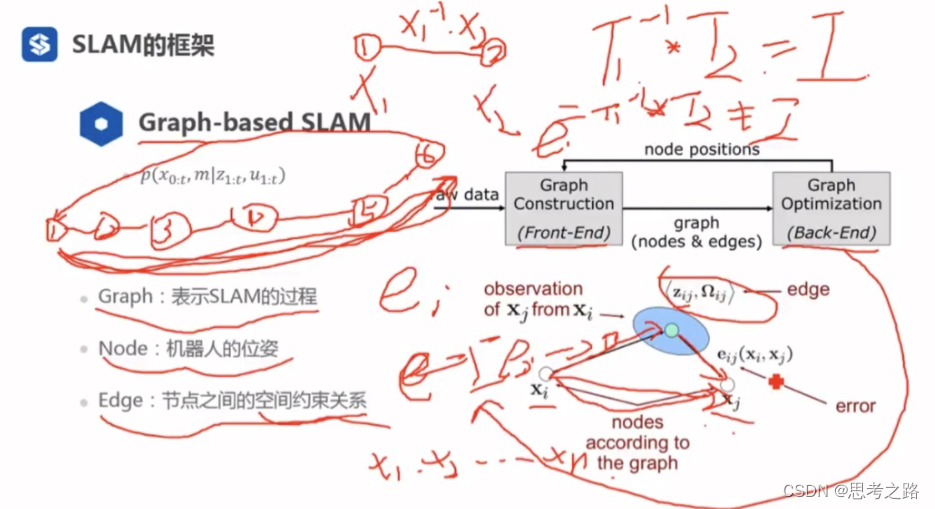
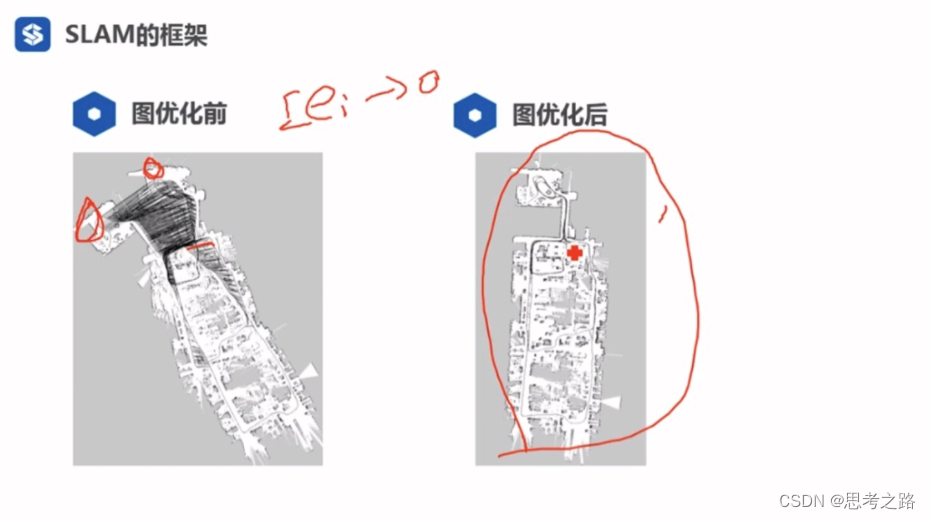
图优化:有节点和边,用图来表示机器人slam的整个过程,优化指机器人在构建图的过程中积累的误差我们通过非线性最小二乘的方式来优化这个建图过程中累积的误差,最终得到一个一致性的地图。
图优化slam分为两部分:前端和后端
前端:构图的构成,节点表示机器人的位姿,边表示机器人的空间约束关系(机器人的相对位置关系)。
后端:优化
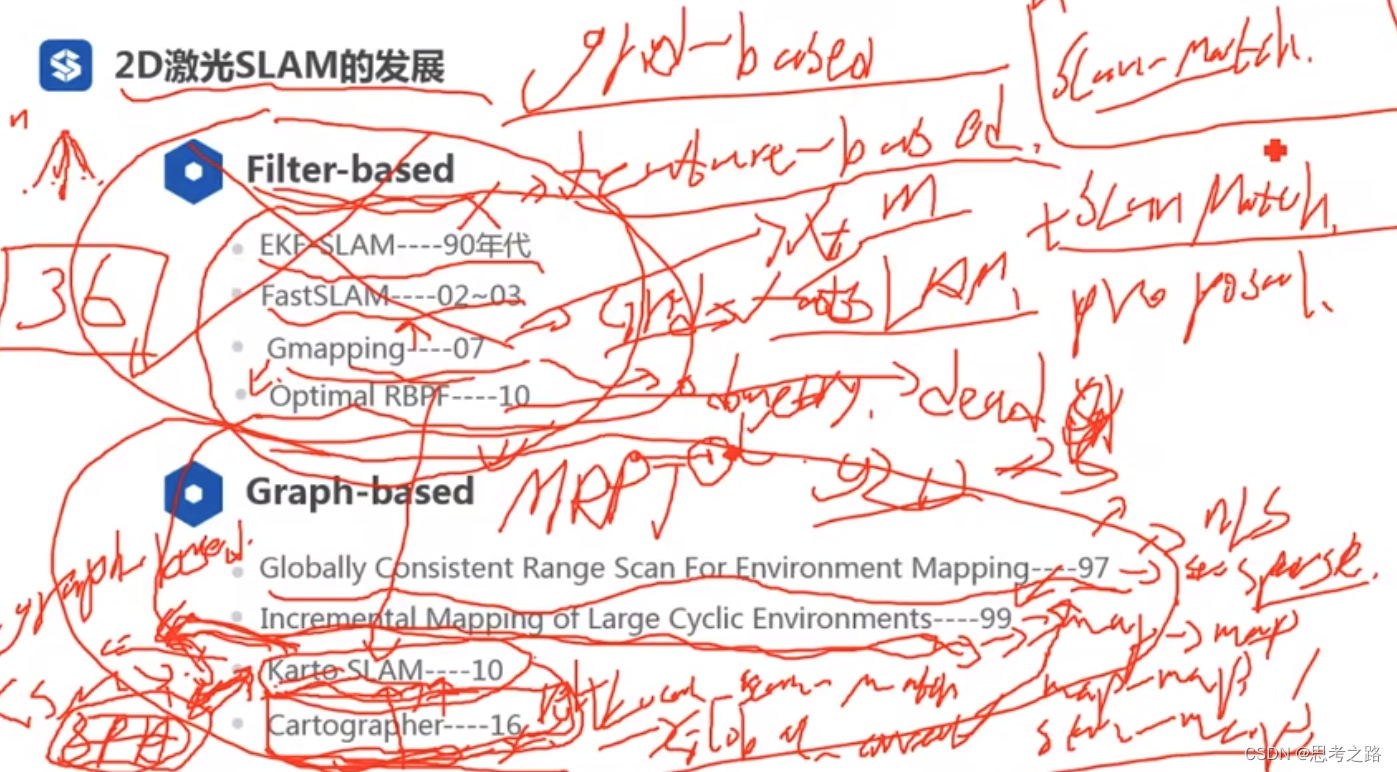
基于滤波器的slam:只估计当前机器人的位姿,而不管之前的位姿。这样滤波器的运算量会小,但是我们在进行slam的过程中不可避免的会产生累积误差,而滤波器只估计当前位姿,前面一但产生累积误差,误差就不会修复了。典型的例子:Gmapping,环境以单大点,结果会很差。

轮式里程计的标定分为:离线标定(offline)和在线标定(online)
离线标定:机器人出厂标定,如轮子直径,轮间距,左右轮大小,相对位置等。
在线标定:实时标定轮子的直径,例如服务形机器人载重时,会使轮子发生形变,为了提高标定的精度,需要对机器人进行实时的标定。
单独使用激光进行slam会存在一些问题,通过与视觉的融合可以解决:
例如:
视觉提供的高精度的里程计信息可以解决地面材质变化,地面凹凸不平,机器人载重等引起的里程计精度的问题。
信息量丰富的视觉地图可以解决几何结构相似和全局定位问题
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









