







 回环检测在SLAM中至关重要,它用于纠正长期运行过程中的累积误差,确保轨迹和地图的一致性。通过图像相似性比较,如词袋模型,检测相机是否重访过同一地点。回环检测方法包括基于外观的方法,利用图像向量的相似度计算。准确率和召回率是衡量检测性能的关键指标。词袋模型通过创建字典和计算TF-IDF权重来描述图像,提高相似度判断的准确性。检测后的验证步骤则通过时间、空间一致性进一步确认回环的有效性。
回环检测在SLAM中至关重要,它用于纠正长期运行过程中的累积误差,确保轨迹和地图的一致性。通过图像相似性比较,如词袋模型,检测相机是否重访过同一地点。回环检测方法包括基于外观的方法,利用图像向量的相似度计算。准确率和召回率是衡量检测性能的关键指标。词袋模型通过创建字典和计算TF-IDF权重来描述图像,提高相似度判断的准确性。检测后的验证步骤则通过时间、空间一致性进一步确认回环的有效性。
回环检测的作用及意义
作用
问题:为了解决整个SLAM出现的累计误差,导致无法构建全局一致的轨迹和地图。
回环检测的关键在于如何有效的检测出相机经过同一个地方
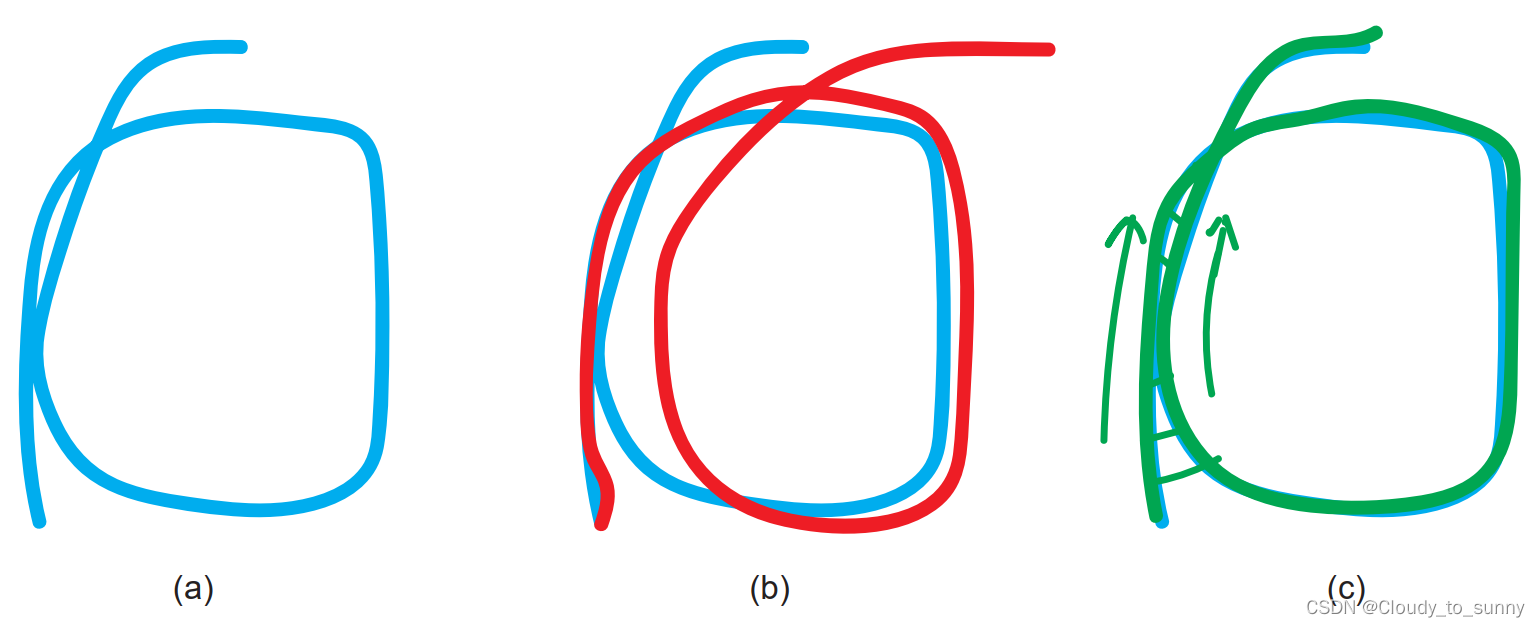
(a)真实轨迹;(b)由于前端只给出相邻帧间的估计,优化后的Pose Graph 出现漂移;(c)添加回环检测后的 Pose Graph 可以消除累积误差。
意义
- 关系到估计的轨迹和地图在长时间下的正确性、
- 能够提高当前数据与所有历史数据的关联,从而可以利用回环检测进行重定位
重定位:确定自身在已经走过的轨迹并建图的场景中的位置。
回环检测方法
基于外观的回环检测方法,与前端和后端都无关,仅根据两幅图像的相似性确定回环检测的关系。该方法的核心问题为:如何计算图像间的相似性
对于图像
A
A
A和图像
B
B
B,记它们之间的相似性评分:s(
A
,
B
A,B
A,B)大于一定量后,我们认为出现了一个回环。
出现问题:
图像可以表示成矩阵,如果直接使用矩阵相减,然后取某一种范数,像这样:
s ( A , B ) = ∥ A − B ∥ s(\boldsymbol{A}, \boldsymbol{B})=\|\boldsymbol{A}-\boldsymbol{B}\| s(A,B)=∥A−B∥
这样做的缺点:
- 像素灰度是一种不稳定的测量值,严重受环境光照和相机曝光的影响。对于同样的数据,也可能得到一个很大的差异值。
- 当相机视角发生少量变化时,即使每个物体的光度不变,它们的像素也会在图像中发生位移,造成一个很大的差异值。
所以做差并求范数这种方式不能很好地反映图像间的相似关系。
准确率和召回率
| 算法/事实 | 是回环 | 不是回环 |
|---|---|---|
| 是回环 | 真阳性(TP) | 假阳性(FP) |
| 不是回环 | 假阴性(FN) | 真阴性(TN) |
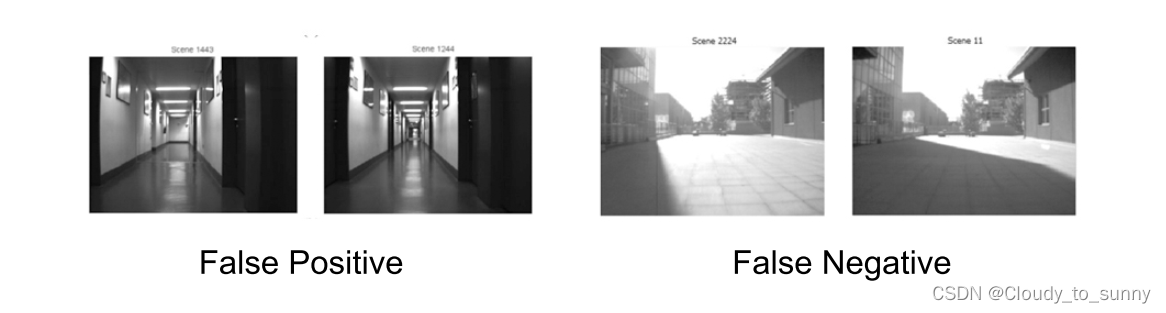
假阳性(False Positive)又称感知偏差,而假阴性(False Negative)称为感知变异。
对于某种特定算法,可以统计它在某个数据集上的TP、TN、FP、FN的出现次数,理想的算法希望TP和TN高,而FP和FN低。
准确率: Precision = TP/(TP+FP)
召回率: Recall = TP/(TP+FN)
准确率:算法提取的所有回环中,确实是真实回环的概率。
召回率:在所有真实回环中,被正确检测出来的概率。
这两个统计量有一定的代表性,并且通常来说是一个矛盾
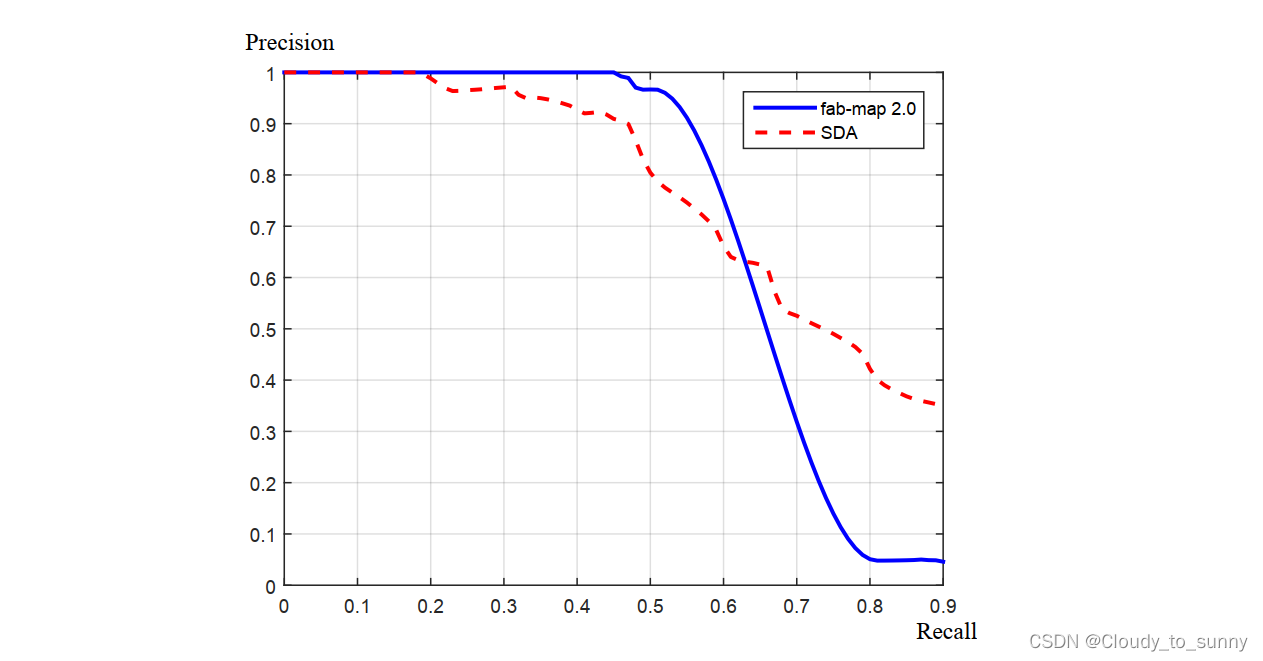
为了评价算法的好坏,我们会测试它在各种配置下的 P 和 R 值,然后做出一条Precision-Recall 曲线。当用召回率为横轴,用准确率为纵轴时,我们会关心整条曲线偏向右上方的程度、 100% 准确率下的召回率,或者 50% 召回率时候的准确率,作为评价算法的指标。
在 SLAM 中,我们对准确率要求更高,而对召回率则相对宽容一些。由于假阳性的(检测结果是而实际不是的)回环将在后端的 Pose Graph 中添加根本错误的边,有些时候会导致优化算法给出完全错误的结果。相比之下,召回率低一些,则顶多有部分的回环没有被检测到,地图可能受一些累积误差的影响——然而仅需一两次回环就可以完全消除它们了。所以说在选择回环检测算法时,我们更倾向于把参数设置地更严格一些,或者在检测之后再加上回环验证的步骤。
前面使用的做差然后求范数的方法,准确率和召回率都不高,所以舍弃。
词袋模型
不使用像前端那样的特征匹配的原因:特征的匹配会比较费时、当光照变化时特征描述可能不稳定。
词袋,也就是 Bag-of-Words(BoW),目的是用“图像上有哪几种特征”来描述一个图像。例如,如果某个照片,我们说里面有一个人、一辆车;而另一张则有两个人、一只狗。根据这样的描述,可以度量这两个图像的相似性。
具体步骤:
- 确定“人、车、狗”等概念——对应于 BoW 中的“单词”(Word),许多单词放在一起,组成了“字典”(Dictionary)。
- 确定一张图像中,出现了哪些在字典中定义的概念——我们用单词出现的情况(或直方图)描述整张图像。这就把一个图像转换成了一个向量的描述。
- 比较上一步中的描述的相似程度。
首先我们通过某种方式,得到了一本“字典”。字典上记录了许多单词,每个单词都有一定意义,例如“人”、“车”、“狗”都是记录在字典中的单词,我们不妨记为
w
1
,
w
2
,
w
3
w_1,w_2,w_3
w1,w2,w3。一张图片可以表示为:
A
=
1
⋅
w
1
+
1
⋅
w
2
+
0
⋅
w
3
A=1 \cdot w_{1}+1 \cdot w_{2}+0 \cdot w_{3}
A=1⋅w1+1⋅w2+0⋅w3
用向量
[
1
,
1
,
0
]
T
[1,1,0]^T
[1,1,0]T表示图片A,也可以说"1"表示有,"0"表示无,或者"1"表示有1个,"0"表示有0个。
通过字典和单词,只需一个向量就可以描述整张图像了。该向量描述的是“图像是否含有某类特征”的信息,比单纯的灰度值更加稳定。又因为描述向量说的是“是否出现”,而不管它们“在哪儿出现”,所以与物体的空间位置和排列顺序无关,因此在相机发生少量运动时,只要物体仍在视野中出现,我们就仍然保证描述向量不发生变化。 ‹ 基于这种特性,我们称它为Bag-of-Words 而不是什么 List-of-Words,强调的是 Words 的有无,而无关其顺序。因此,可以说字典类似于单词的一个集合。
设计一定的计算方式,就能确定图像间的相似性
s ( a , b ) = 1 − 1 W ∥ a − b ∥ 1 s(\boldsymbol{a}, \boldsymbol{b})=1-\frac{1}{W}\|\boldsymbol{a}-\boldsymbol{b}\|_{1} s(a,b)=1−W1∥a−b∥1
其中范数取 L1 范数,即各元素绝对值之和。请注意在两个向量完全一样时,我们将得到 1;完全相反时(a 为 0 的地方 b 为 1)得到 0。这样就定义了两个描述向量的相似性,也就定义了图像之间的相似程度。
字典
字典的结构
字典生成问题类似于一个聚类问题。聚类问题是无监督机器学习(Unsupervised ML)中一个特别常见的问题,用于让机器自行寻找数据中的规律的问题。 BoW 的字典生成问题亦属于其中之一。
当有 N N N个数据,想要归成k个类,使用K-means的步骤:
- 随机选取 k 个中心点: c 1 , . . . , c k c1,...,c_k c1,...,ck。
- 对每一个样本,计算与每个中心点之间的距离,取最小的作为它的归类。
- 重新计算每个类的中心点。
- 如果每个中心点都变化很小,则算法收敛,退出;否则返回 1。
问题:如何根据图像中某个特征点,查找字典中相应的单词?
k
k
k叉树
假设有
N
N
N个特征点,希望构建一个深度为d、每次分叉为
k
k
kd的树,步骤:
- 在根节点,用 k-means 把所有样本聚成 k 类(实际中为保证聚类均匀性会使用
k-means++)。这样得到了第一层。- 对第一层的每个节点,把属于该节点的样本再聚成 k 类,得到下一层。
- 依此类推,最后得到叶子层。叶子层即为所谓的 Words。

实际上,最终我们仍在叶子层构建了单词,而树结构中的中间节点仅供快速查找时使用。这样一个 k 分支,深度为 d 的树,可以容纳 kd 个单词。另一方面,在查找某个给定特征对应的单词时,只需将它与每个中间结点的聚类中心比较(一共 d 次),即可找到最后的单词,保证了对数级别的查找效率。
字典的创建
训练字典就像机器学习根据数据集进行训练一样,这里使用 的是 BoW库,这里使用的是DBoW3,具体库下载在Github上,按照cmake流程对它进行编译和安装
训练字典:
#include "DBoW3/DBoW3.h"
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/features2d/features2d.hpp>
#include <iostream>
#include <vector>
#include <string>
using namespace cv;
using namespace std;
/***************************************************
* 本节演示了如何根据data/目录下的十张图训练字典
* ************************************************/
int main( int argc, char** argv ) {
// read the image
cout<<"reading images... "<<endl;
vector<Mat> images;
for ( int i=0; i<10; i++ )
{
string path = "./data/"+to_string(i+1)+".png";
images.push_back( imread(path) );
}
// detect ORB features
cout<<"detecting ORB features ... "<<endl;
Ptr< Feature2D > detector = ORB::create();
vector<Mat> descriptors;
for ( Mat& image:images )
{
vector<KeyPoint> keypoints;
Mat descriptor;
detector->detectAndCompute( image, Mat(), keypoints, descriptor );
descriptors.push_back( descriptor );
}
// create vocabulary
cout<<"creating vocabulary ... "<<endl;
DBoW3::Vocabulary vocab;
vocab.create( descriptors );
cout<<"vocabulary info: "<<vocab<<endl;
vocab.save( "vocabulary.yml.gz" );
cout<<"done"<<endl;
return 0;
}
相似度计算
由于有些单词对图像描述的作用不同,有的作用较大,比如“文档、足球”,有的作用不大,比如“的,是”,因此希望对单词的区分性或重要性加以评估,给他们不同的权重以起到更好的效果。
TF-IDF(Term Frequency-Inverse Document Frequency),或译频率-逆文档频率,是文本检索中常用的一种加权方式,也用于BoW模型中。TF 部分的思想是,某单词在一个图像中
经常出现,它的区分度就高。另一方面, IDF 的思想是,某单词在字典中出现的频率越低,
则分类图像时区分度越高。
我们统计某个叶子节点
w
i
w_i
wi 中的特征数量相对于所有特征数量的比例,作为 IDF 部分。假设所有特征数量为
n
,
w
i
n,w_i
n,wi 数量为
n
i
n_i
ni,那么该单词的 IDF 为:
I
D
F
i
=
log
n
n
i
\mathrm{IDF}_{i}=\log \frac{n}{n_{i}}
IDFi=lognin
TF 部分则是指某个特征在单个图像中出现的频率。假设图像 A 中,单词 w i w_i wi 出现了 n i n_i ni 次,而一共出现的单词次数为 n n n,那么 TF 为:
T
F
i
=
n
i
n
\mathrm{TF}_{i}=\frac{n_i}{n}
TFi=nni
w
i
w_i
wi的权重等于TF乘IDF之积:
η i = T F i × I D F i \eta_{i}=\mathrm{TF}_{i} \times \mathrm{IDF}_{i} ηi=TFi×IDFi
考虑权重后,对于谋福图像A,它的特征点可队以可对应到许多个单词,组成它的BoW为:
η
i
=
T
F
i
×
I
D
F
i
A
=
{
(
w
1
,
η
1
)
,
(
w
2
,
η
2
)
,
…
,
(
w
N
,
η
N
)
}
≜
v
A
\eta_{i}=\mathrm{TF}_{i} \times \mathrm{IDF}_{i}A=\left\{\left(w_{1}, \eta_{1}\right),\left(w_{2}, \eta_{2}\right), \ldots,\left(w_{N}, \eta_{N}\right)\right\} \triangleq \boldsymbol{v}_{A}
ηi=TFi×IDFiA={(w1,η1),(w2,η2),…,(wN,ηN)}≜vA
计算两张图片AB的相似度:
L
1
L_1
L1范数形式:
s ( v A − v B ) = 2 ∑ i = 1 N ∣ v A i ∣ + ∣ v B i ∣ − ∣ v A i − v B i ∣ s\left(\boldsymbol{v}_{A}-\boldsymbol{v}_{B}\right)=2 \sum_{i=1}^{N}\left|\boldsymbol{v}_{A _i}\right|+\left|\boldsymbol{v}_{B _i}\right|-\left|\boldsymbol{v}_{A _i}-\boldsymbol{v}_{B_ i}\right| s(vA−vB)=2i=1∑N∣vAi∣+∣vBi∣−∣vAi−vBi∣
相似度评分的处理
使用相似性评分并不是检测回环的唯一依据。
有些环境的外观本来就很相似,像办公室往往有很多同款式的桌椅;另一些环境则各个地方都有很大的不同。考虑到这种情况,我们会取一个先验相似度 s ( v t , v t − ∆ t ) s (v_t, v_{t−∆t}) s(vt,vt−∆t),它表示某时刻关键帧图像与上一时刻的关键帧的相似性。然后,其他的分值都参照这个值进行归一化:
s ( v t , v t j ) ′ = s ( v t , v t j ) / s ( v t , v t − Δ t ) s\left(\boldsymbol{v}_{t}, \boldsymbol{v}_{t_{j}}\right)^{\prime}=s\left(\boldsymbol{v}_{t}, \boldsymbol{v}_{t_{j}}\right) / s\left(\boldsymbol{v}_{t}, \boldsymbol{v}_{t-\Delta t}\right) s(vt,vtj)′=s(vt,vtj)/s(vt,vt−Δt)
如果当前帧与之前某关键帧的相似度,超过当前帧与上一个关键帧相似度的 3 倍,就认为可能存在回环。这个步骤避免了引入绝对的相似性阈值,使得算法能够适应更多的环境。(为什么3倍,这个步骤好像也避免不了上面那个问题,能理解的同学希望评论区告我,感谢)
关键帧的处理
关键帧不会选的太近,因为选的太近的两个关键帧相似度较高,这样效果不好。从实践上说,用于回环检测的帧最好是稀疏一些,彼此之间不太相同,又能涵盖整个环境。
如果成功检测到了回环,比如说出现在第 1 帧和第 n 帧。那么很可能第n + 1 帧, n + 2 帧都会和第 1 帧构成回环。出现这种情况时,会把“相近”的回环聚成一类,使算法不要反复地检测同一类地回环。
检测之后的验证
词袋的回环检测算法完全依赖于外观而没有利用任何的几何信息,这导致外观相似的图像容易被当成回环。并且,由于词袋不在乎单词顺序,只在意单词有无的表达方式,更容易引发感知偏差(不是回环,但算法检测 是回环)。因此,需要一个验证步骤。
验证方法:
- 时间一致性检测:设立回环的缓存机制,认为单次检测到的回环并不足以构成良好的约束,而在一段时间中一直检测到的回环,才认为是正确的回环。
- 空间一致性检测:对回环检测到的两个帧进行特征匹配,估计相机的运动。然后,再把运动放到之前的位姿图中,检查与之前的估计是否有很大的出入。

















 414
414

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









