






基础知识
i系是惯性坐标系
e系为地球坐标系
p系为平台坐标系
t系为地理坐标系
b系为载体坐标系
导航坐标系:导航坐标系,是惯性测量和导航计算的基准。不同的航行器、不同的导航系统、不同的任务使命,所使用的导航坐标系,一般来说是不同的。
有害加速度分为原理性有害加速度和非原理有害加速度,原理性有害加速度通过比力去除,非原理性加速度,只能通过卡尔曼滤波削弱其影响。
原理有害加速度:具有严格的解析计算公式、
非原理有害加速度:电噪声和机械噪声,均为随机信号、不能用解析式表示
比力方程是惯性导航系统的基本方程,它解决了惯性导航中加速度计的测量值(比力)和导航参数(速度)之间的关系。

主要作用:去除原理性有害加速度
详细解释
下面以“东北天”地理系为例加以说明公式参数
![]() 为减去原理性有害加速度的加速度
为减去原理性有害加速度的加速度
![]()
需要将载体系的比力转换到导航系上,既把传感器输出的值乘以姿态矩阵
fn=Cnbfb

Wie是地球自转角速率,是一个常量,其中当地维度为,则在地理坐标系的投影为:
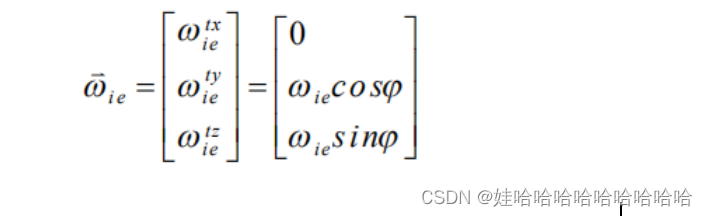

以“东北天”地理系为例进行投影,投影的结果如下:
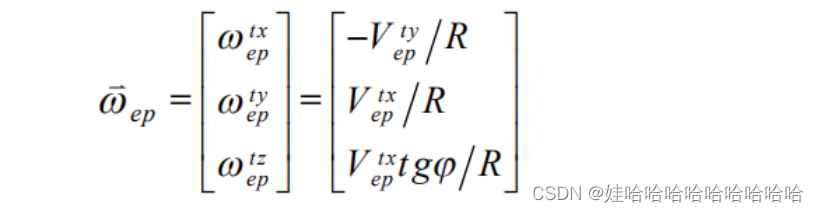
实际应用如下式子:

式中,参数和上述类似
Rm子午圈的曲率半径

L是当地纬度
Rn卯酉圈的曲率半径

将惯性导航基本方程式,向“东北天”地理系投影后:
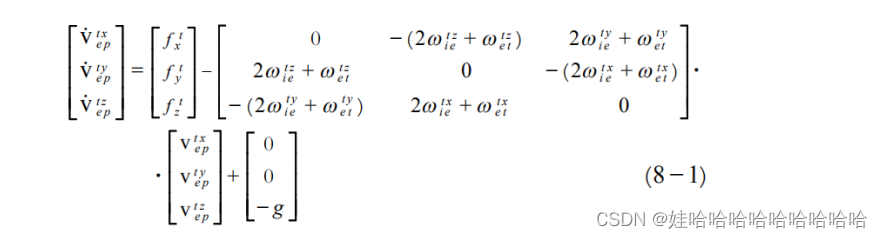
在已知初始速度和初始位置的情况下,对“相对加速度”一次积分,便可得到载体的运行速度。二次积分,可以得到载体的运行距离(地理位置)。

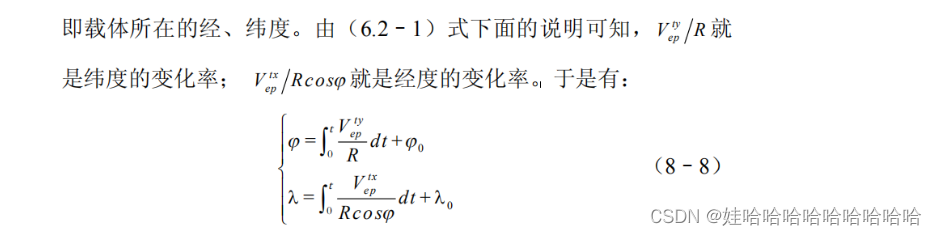
需要指出的是,用地球的平均半径 R 计算纬度,会产生较大的误差,必须将地球看成椭球体,并根据所在的纬度进行修正。
完整的指北方位惯导系统的力学编排方案,如图下图所示
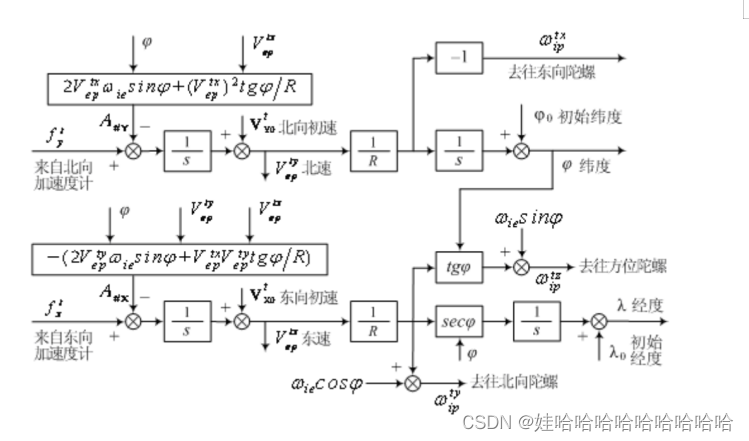
参考:《惯性导航基本原理》-刘保中















 3660
3660











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









