







惯性导航和惯性器件(一)
惯性传感器
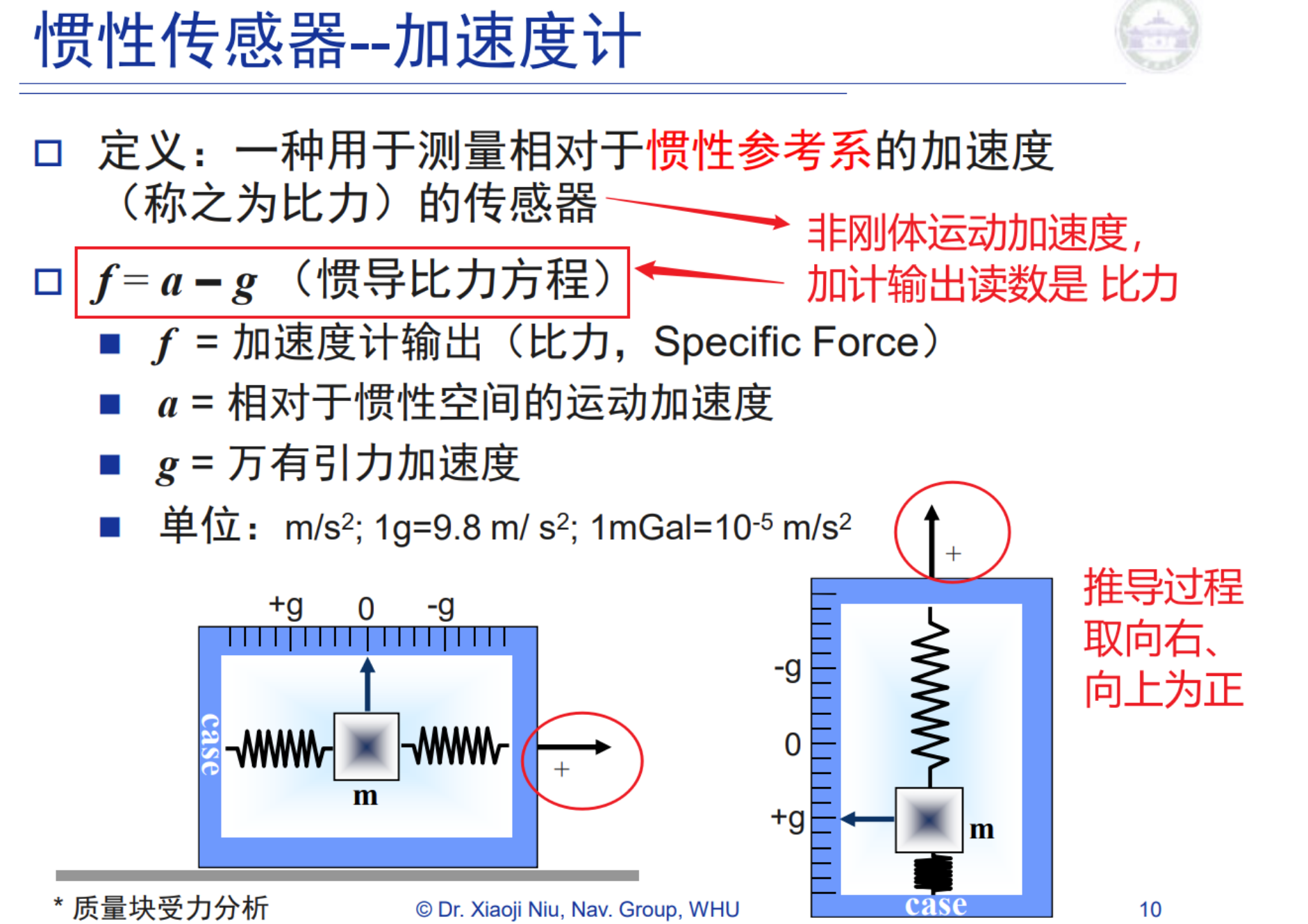
加速度计及输出
-
加速度计输出为比力,而非刚体直接的运动加速度。
-
比力方程推导:
F 弹 ⃗ + m g ⃗ = m a ⃗ \vec{F_弹} + m\vec{g} = m\vec{a} F弹+mg=ma
F 弹 ⃗ / m + g ⃗ = a ⃗ \vec{F_弹}/m + \vec{g} = \vec{a} F弹/m+g=a
f ⃗ = a ⃗ − g ⃗ \vec{f} = \vec{a} - \vec{g} f=a−g如上图, g ⃗ = − 9.8 m / s , a ⃗ = 0 \vec{g} = -9.8m/s, \vec{a}=0 g=−9.8m/s,a=0。因此此时加速度计的比力输出为 f ⃗ = 0 − ( − 9.8 m / s ) = 9.8 m / s \vec{f} = 0 - (-9.8 m/s) = 9.8 m/s f=0−(−9.8m/s)=9.8m/s(方向向上)
比力理解
@知乎
加速度计测量不了重力,所以当加速度计敏感轴垂直水平面时你会得到1g的输出,而此时加速度计本身是静止的,所受外力为0。你得到的1g输出其实是支撑力加速度。
比力,就是载体受到的除重力以外的外力。例如,载体自由落体时,比力为零;载体静止时,比力等于重力。
–所以描述物体的加速度要扣除重力加速度
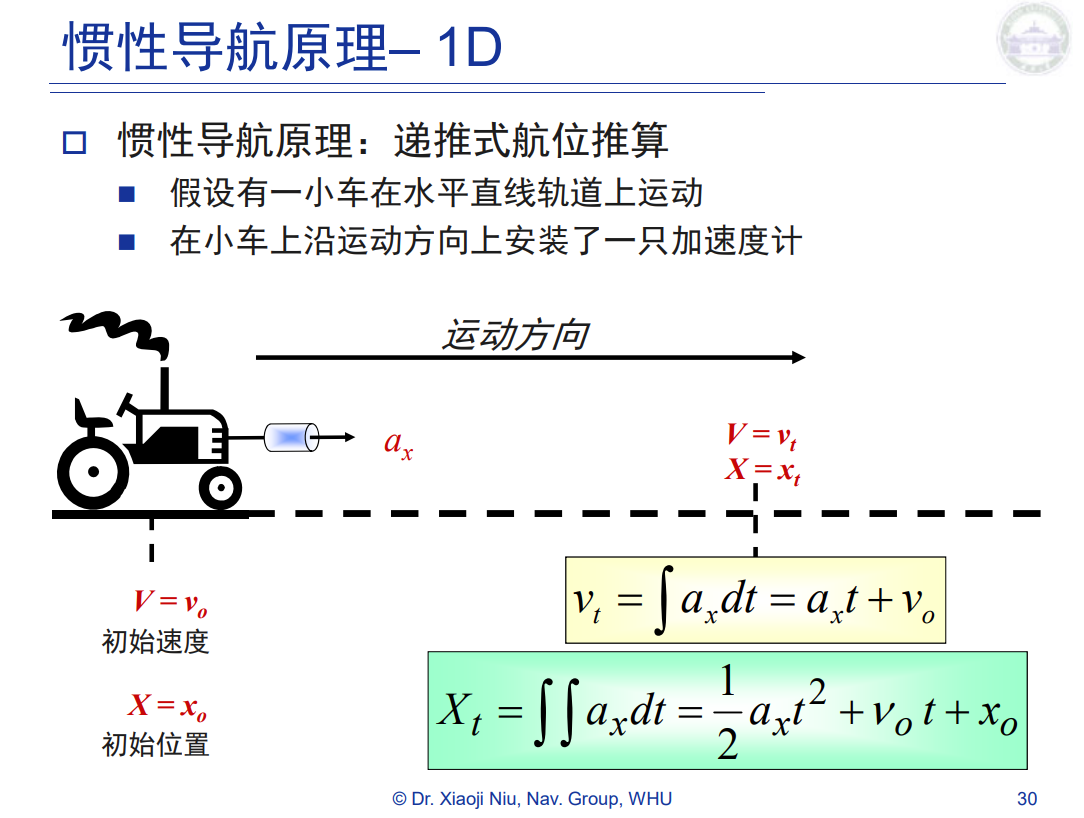
惯性导航原理
一维情况
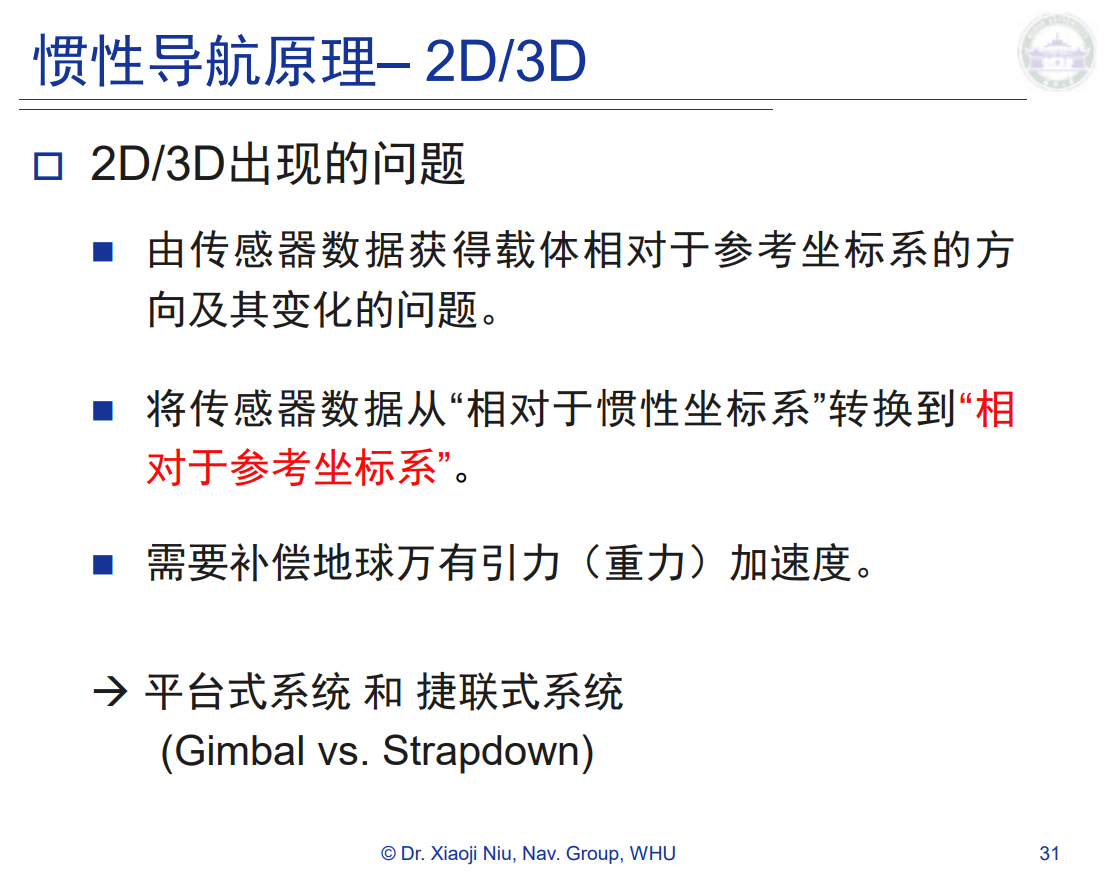
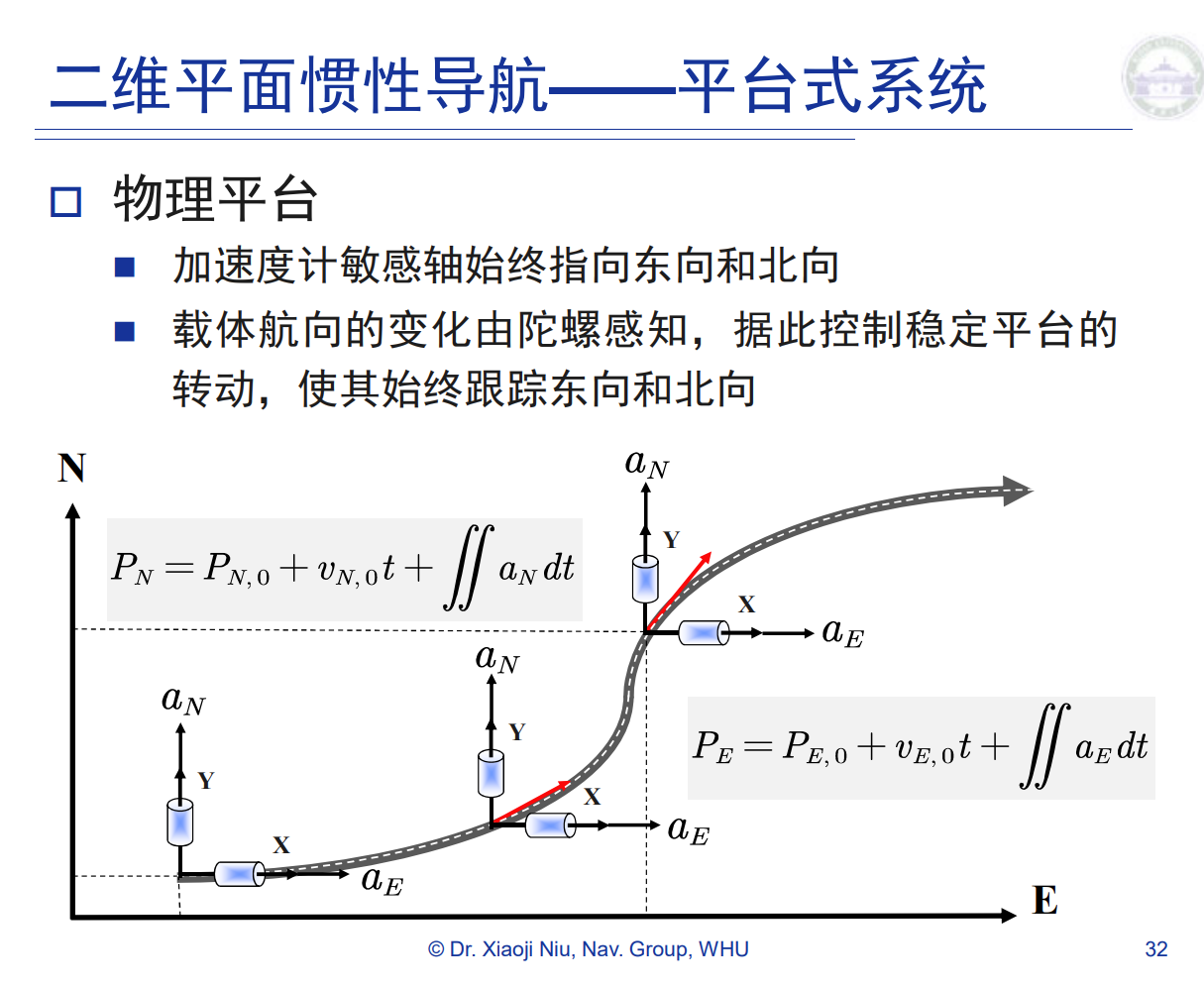
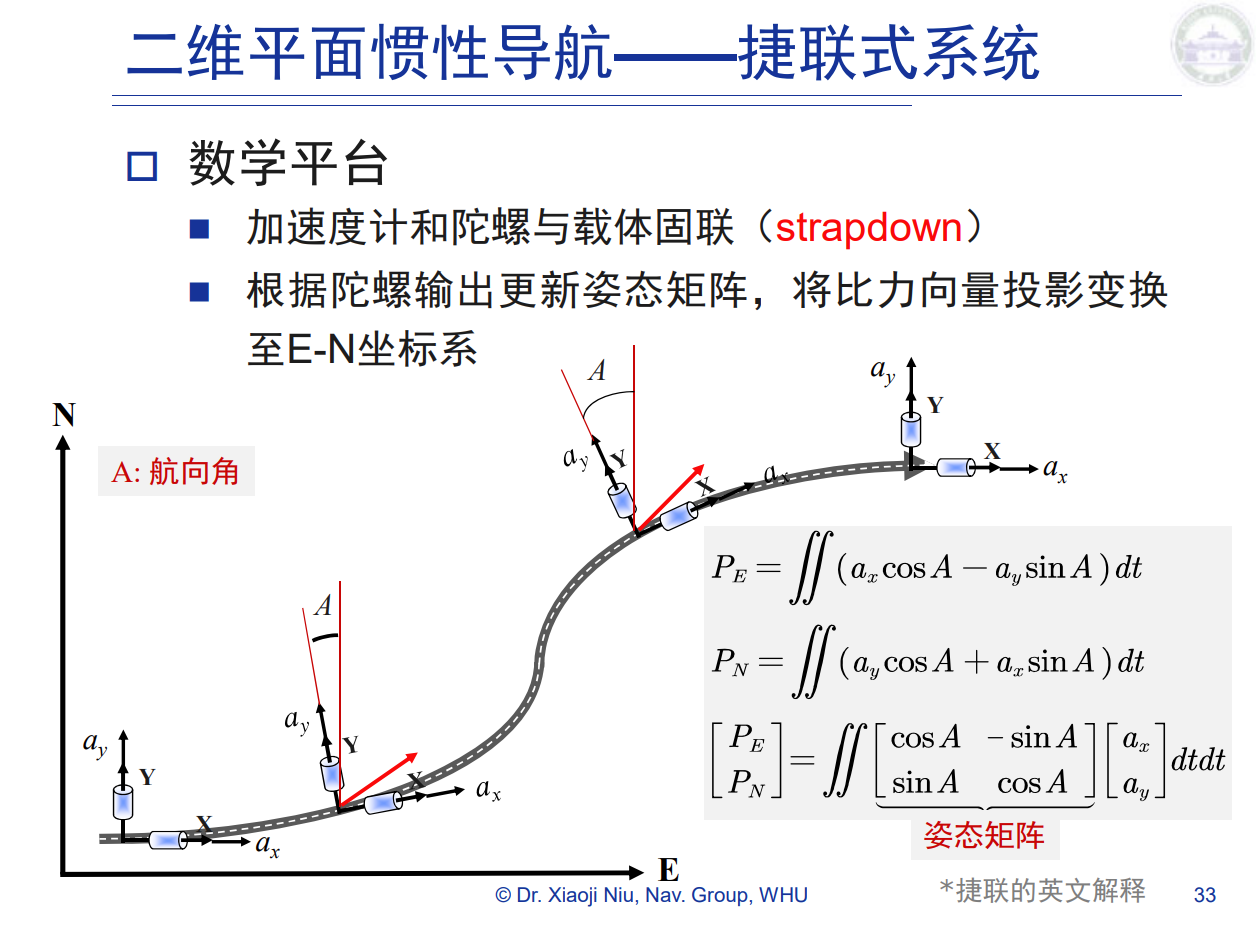
二维情况
平台式系统
捷联式系统
惯导误差规律

-
简化后误差初步分析–陀螺精度与时间三次方成正比,为精度影响主要因素
-
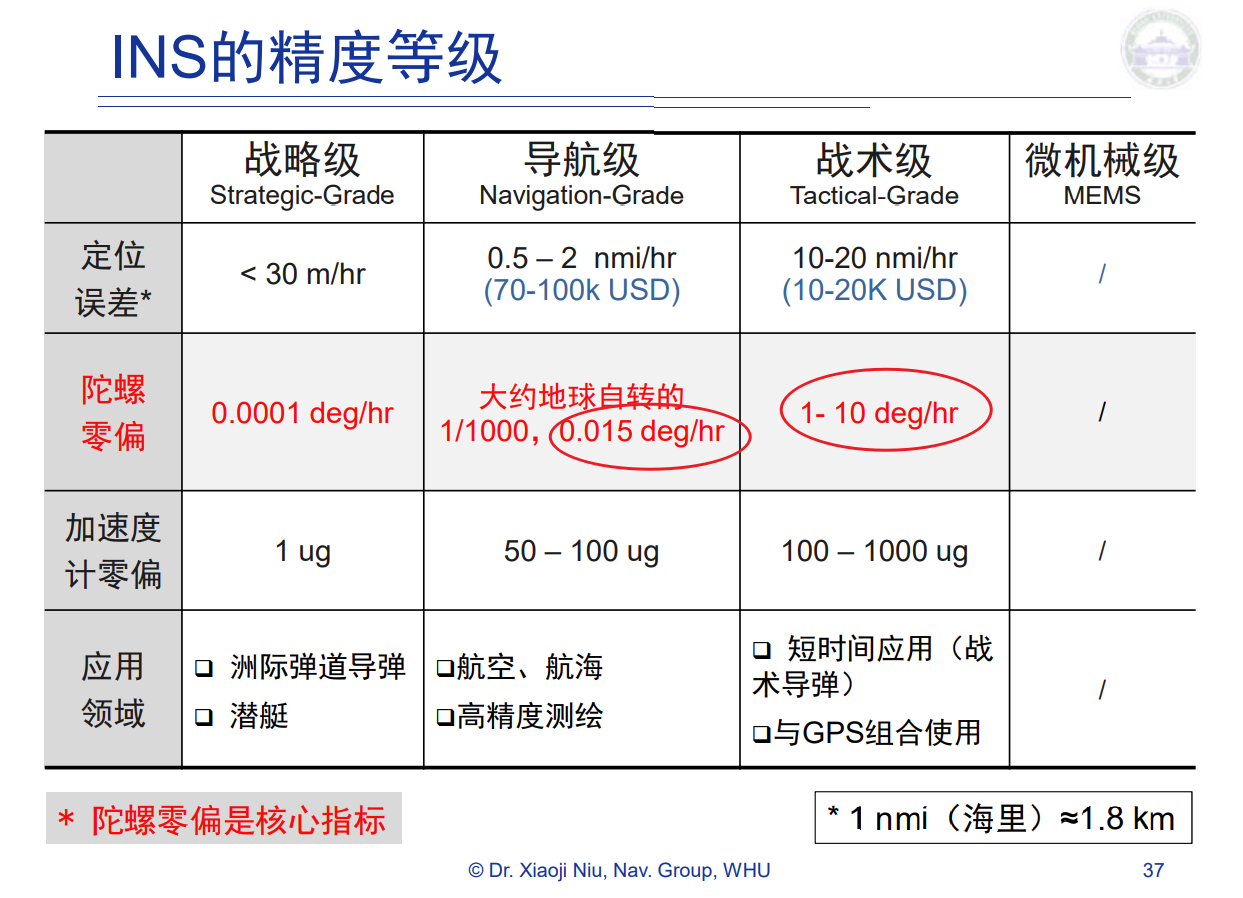
对惯导的精度划分,以陀螺的精度指标(陀螺零偏)
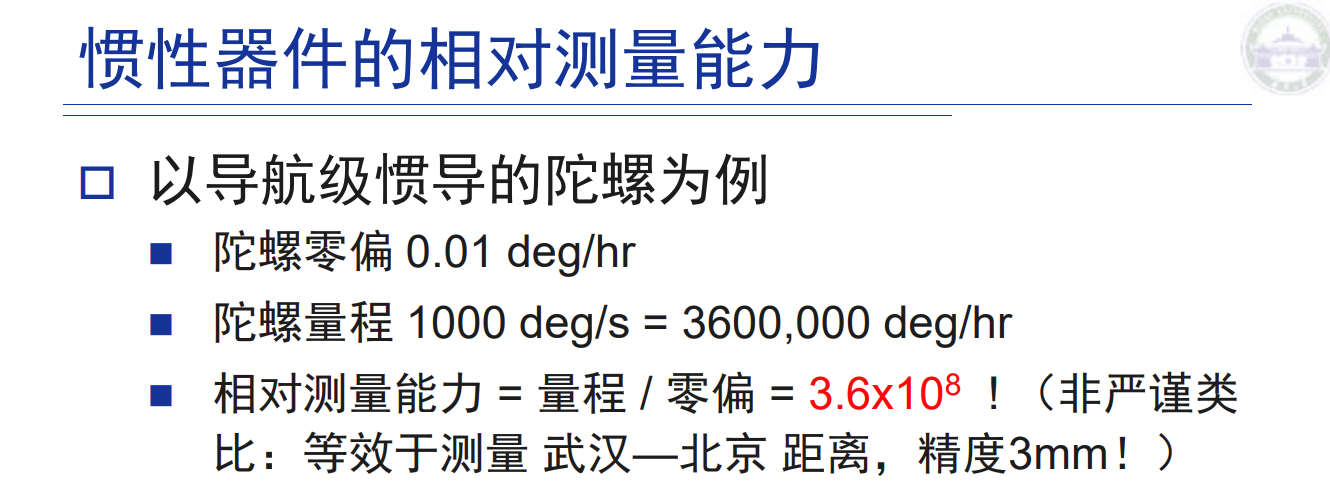
惯性器件相对测量能力















 1317
1317











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









