






今天逛 GitHub 的时候,发现了一个有意思的开源项目。
它能帮你制作一款低成本、用自己手机控制的小型无人机,没错,本篇文章就教你如何自己窜一个自己的小型无人机。

DIY 一个无人机的材料,都是可以在某宝买到,不需要 3D 打印。比如开发板、角度传感器、电机和螺旋桨这些硬件,对应的型号网上一搜全是。
而且如果你有 Python 编程基础,你还可以使用 Python 进行编程,实现更多功能,比如高度保持、位置保持、手势控制等等。
开始吧。
01
准备材料
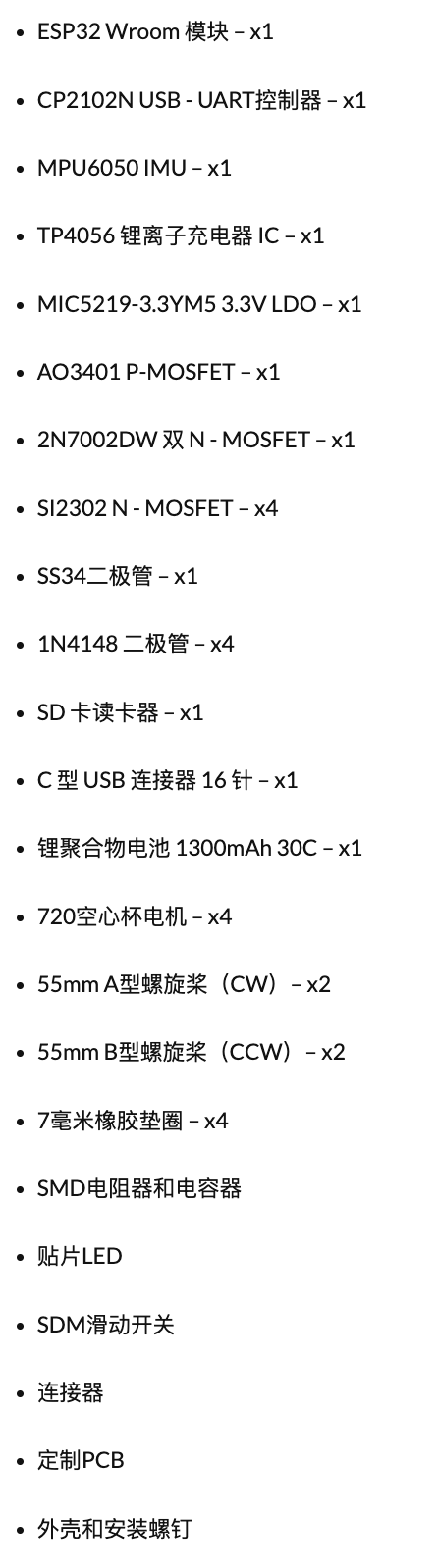
制作之前你需要准备如下元器件材料,如果网上购买的话,这些加起来大概五六百就搞定了(我让 DeepSeek 算的),比如某宝搜索 MPU6050 IMU、ESP32,也就 10 几块。
02
定制印刷电路板
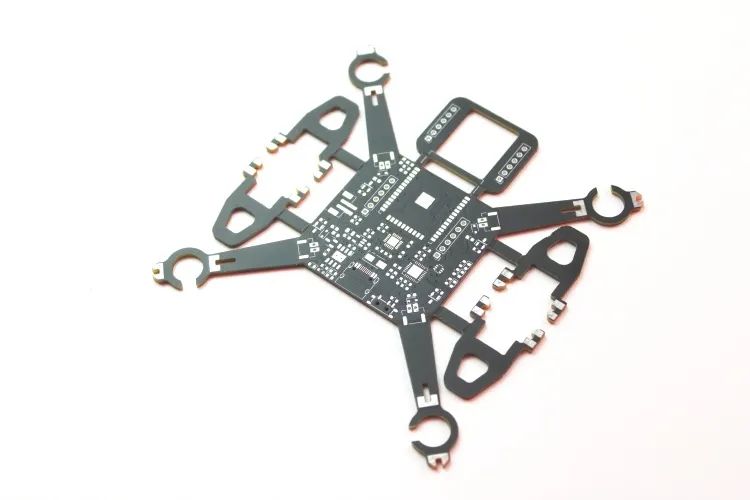
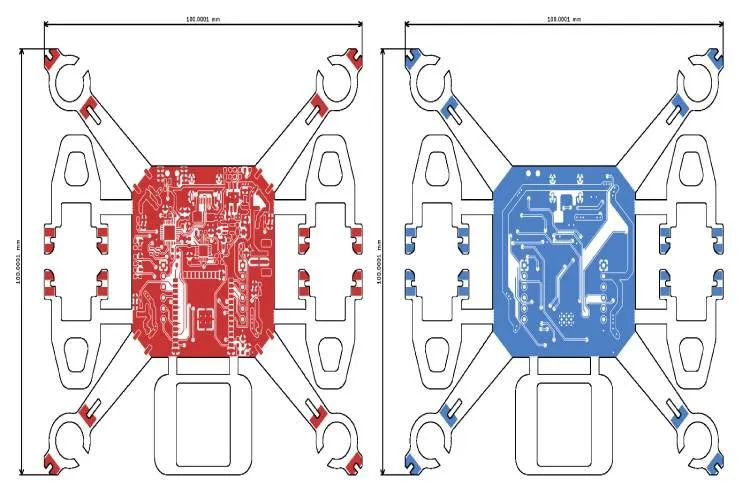
这个小巧无人机的印刷电路板(PCB)是开发者自己定制,开发者最终测下来定制的尺寸能让最终成品尽可能紧凑,并且易于组装。
如下图所示。国内也好整,网上找定制就能解决。
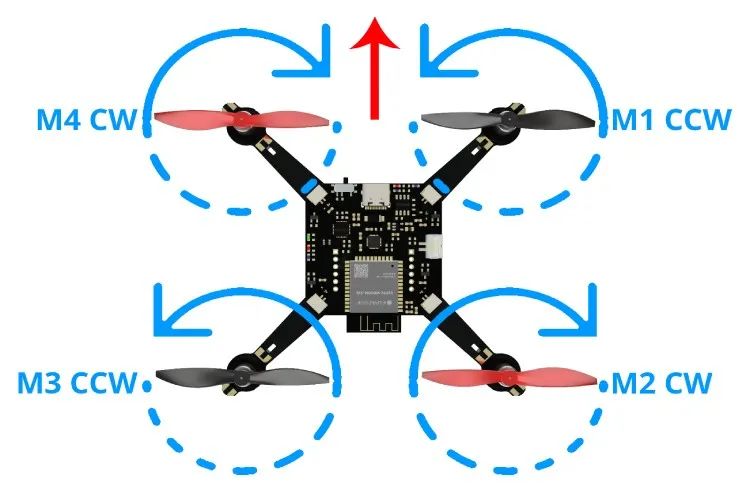
配置螺旋桨:
组装无人机重要部件:
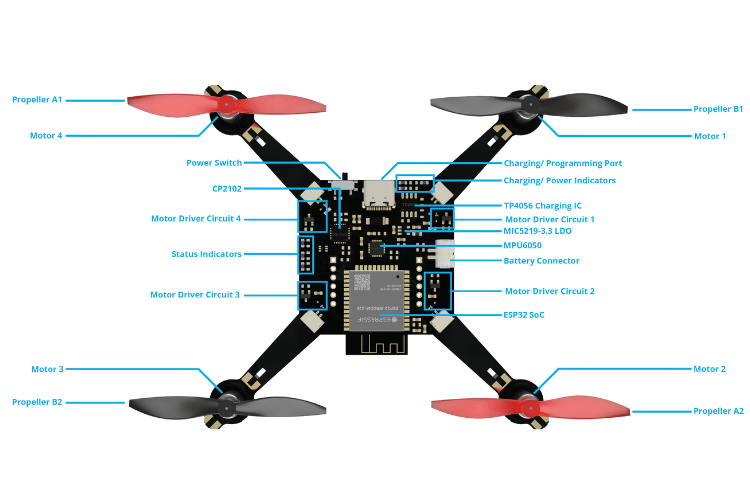
下图是完全组装了的样子。

03
无人机电路图
这个开源项目提供了详细的电路图 PDF 文件,可以关注公众号回复 250415 获取在线电路图链接。
开源作者还贴心的逐个解释了电路图原理,第一部分:
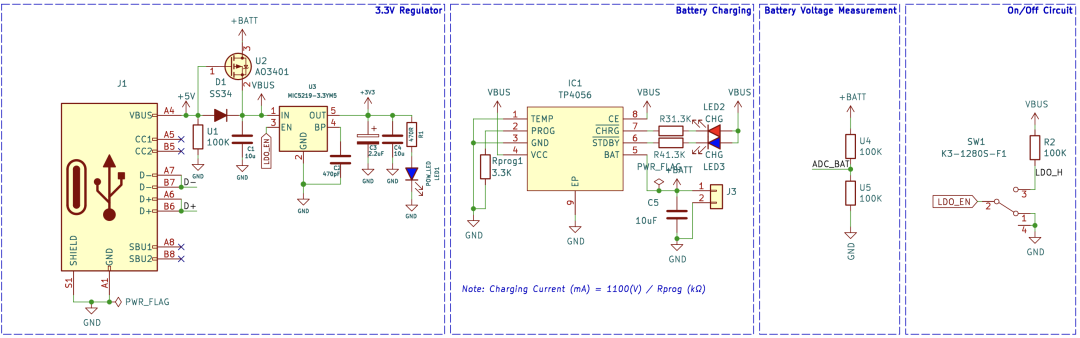
采用 Type-C USB 接口实现充电与程序烧录双功能。电源管理电路基于P沟道MOSFET(U2)和二极管 D1 构建。接入电源时,优先使用外部供电并给内置电池充电;断电后切换至电池。
电压调节核心采用 Microchip 的 MIC5219 低压差线性稳压器(LDO),该器件具备 500mA 输出能力,满载时压差仅 500mV,可稳定输出 3.3V 电压。
电池管理系统采用 TP4056 充电管理芯片,支持最大 1A 充电电流。电压检测采用经典分压电路设计,满足大电流快充需求,确保电压监测的精确性与系统安全性。
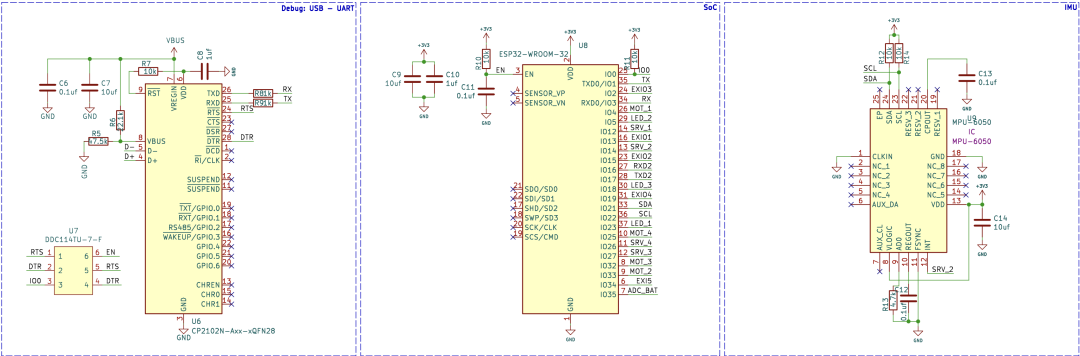
配置了 ESP32 片上系统(SoC)及其配套的编程电路与 MPU6050 电源管理芯片。编程电路包含CP2102 USB转UART控制器,以及安森美半导体的2N7002DW双N沟道MOSFET。其中CP2102采用QFN28封装,而微型双MOSFET则作为ESP32的自动复位电路。
ESP32外围电路采用标准配置,仅需布置旁路电容与上拉电阻即可实现基础功能。
MPU6050电源管理芯片负责飞行姿态稳定与运动控制,通过标准I2C接口与ESP32 SoC进行通信,具体连接至GPIO21(SDA)和GPIO22(SCL)引脚。
电机驱动电路。每个电机驱动电路均包含 SI2302 N 沟道MOSFET、续流二极管及下拉电阻。本设计共配置四组独立驱动电路,分别对应四个电机。
当 MOSFET 驱动管的栅极接收到高电平信号时,器件导通并驱动电机运转。系统采用 PWM(脉宽调制)信号实现电机转速控制。电路中配置的续流二极管与电容组可有效抑制电机反电动势及电压尖峰,确保电路安全。
04
固件烧录指南
这个无人机固件基于 ESP-drone 固件进行二次开发。项目代码采用 ESP-IDF 框架编写,编译环境要求使用 ESP-IDF 4.4.5 版本。可以通过下方 GitHub 仓库提供的源码进行完整编译:
开源地址:https://github.com/Circuit-Digest/ESP-Drone
除此之外,也可以使用 ESPTOOL 、使用 ESP32 Flash 下载工具完成,这里就不介绍了。感兴趣前往项目 ReadMe 文件查看具体描述。
05
无人机,起飞!
一切搞好了后,将无人机放地上开机。这时候你的手机能搜索到"ESP-DRONE"的WiFi热点(默认密码:12345678)。
连接成功后,你就下载一个操控 APP 就行了,iOS 设备直接 App Store 搜索下载 ESP-Drone 应用。Android 设备本公众号后台私信 250415 获取安装包。
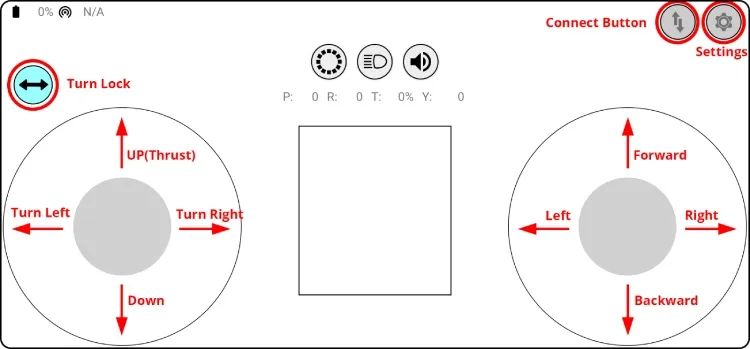
成功连接后,无人机尾部闪绿灯。使用左摇杆控制无人机起降或降落。使用右摇杆控制飞行。

好了,至此,你已经 DIY 一个小型无人机。
06
点击下方卡片,关注我
这个公众号历史发布过很多有趣的开源项目,如果你懒得翻文章一个个找,你直接关注微信公众号:逛逛 GitHub ,后台对话聊天就行了:

















 2533
2533

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









