







 本文详细介绍了如何组装一台基本的PX4无人机,包括所需配件清单、焊接技巧和飞控安装要点。重点提及了电调选择、电机方向调整以及可选配的GPS和数传功能。
本文详细介绍了如何组装一台基本的PX4无人机,包括所需配件清单、焊接技巧和飞控安装要点。重点提及了电调选择、电机方向调整以及可选配的GPS和数传功能。
一直没有写应该如何组装一个PX4无人机,大多数如果你在淘宝买了一整个套装的话,店家说明中的也并不详细,所以在这里做一个总结。
配件:
组装一台最简单只是能飞的无人机,需要最基本的配件如下所示。
- 机架(如极度便宜的F450,还自带了分电板)
- 电机电调(一般PX4四个电机和四个分体式电调20A)
- 飞控(我这是闲鱼收的pixhawk2.4.8,刷的APM固件,回来自己刷老版本PX4,新版本太卡)
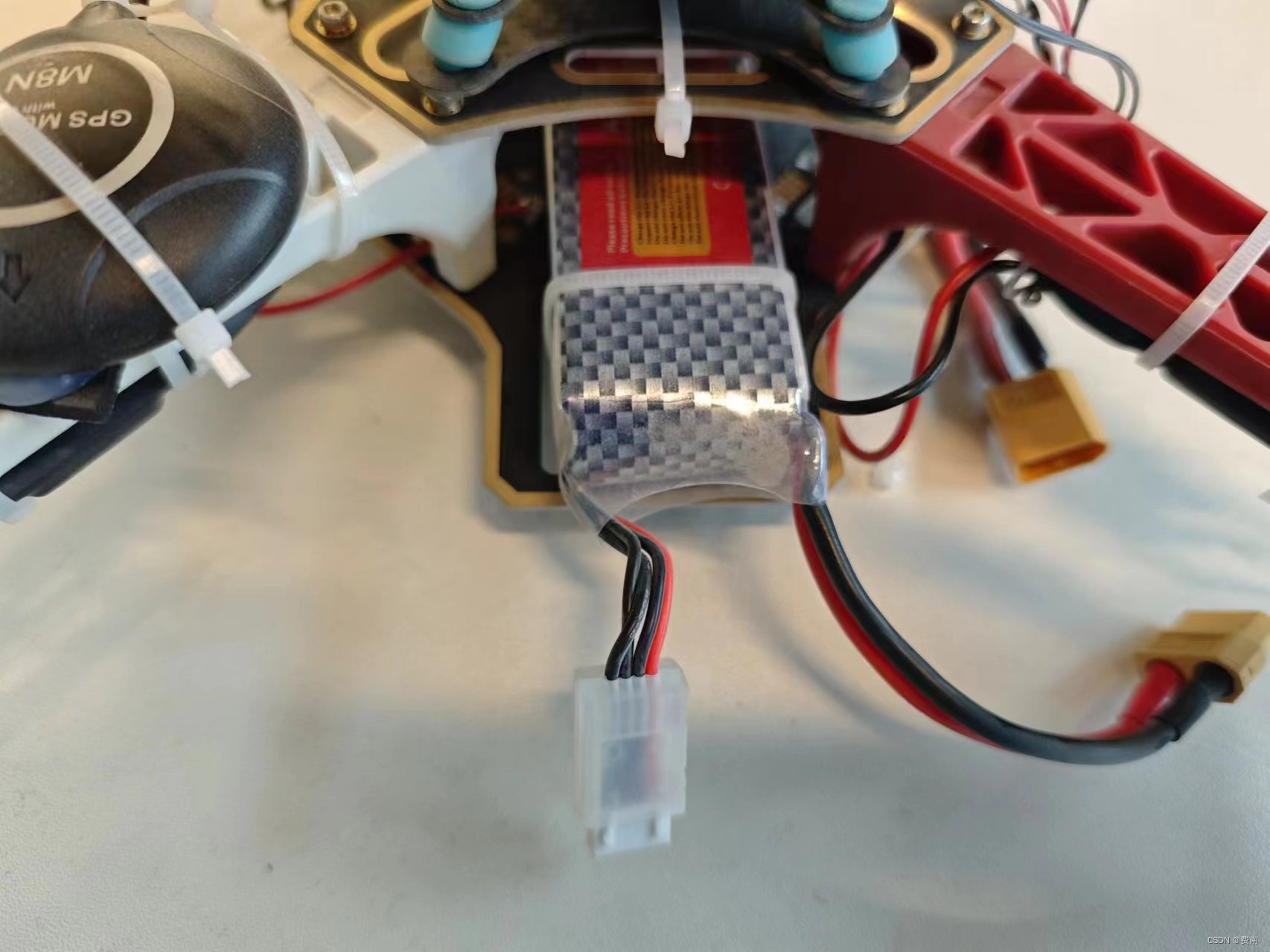
- XT60接口、电流计、以及电池(需要适配XT60接口,实在不行焊接上去也行)当然如果是电池的话还需要一个平衡充(用来充电池)
- 遥控器和与之对应的接收机(我这买了个非常便宜的MC6C)
然后就可以了,这就是能让无人机飞起来的最少套装。
组装:
然后开始组装:
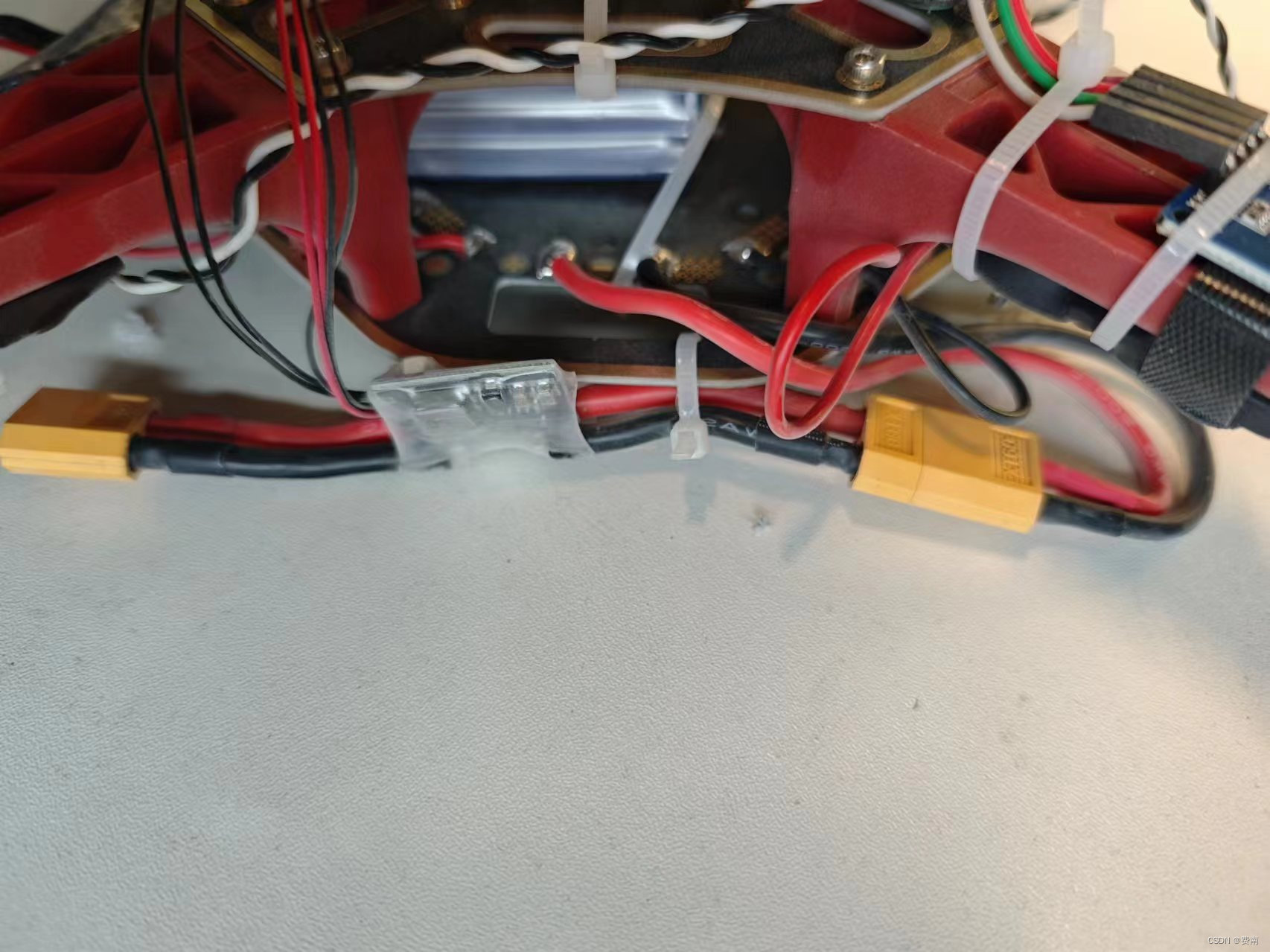
1、 焊接电池接口和分电板,将电池接口XT60焊接到分电板上,一般分电板上写了“+”,“-”,红线对应正极。
2、焊接电调和分电板,红线对应正极。
这里有个小知识:电调的选择看电压和电流,电压一般是一个比较宽幅的范围,例如在电调上写着2s-4s,这意味着电调支持2s、3s、4s的电池,也就是意味着按照充满的电池算,2S电池电压是2*4.2V=8.4V,4S电池的电压是4*4.2V=16.8V,这个电调的电压范围就是8.4V-16.8V

3、焊接好四个电调之后,把整个机架和机臂都安装上。
4、把飞控装上,确定机头方向(重要)
这个步骤非常坑,如果不注意很有可能要后续在拆,这是因为虽然无刷电机调整电调接线可以让电机正反转,但问题是我买的这个飞机电机对应的桨叶是固定的,相反的桨叶无法安装在颜色不同的电机上。
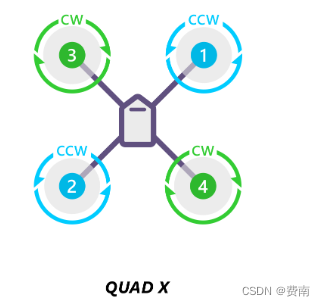
PX4的电机转动方向如下图所示,在QGC地面站上也能看见。
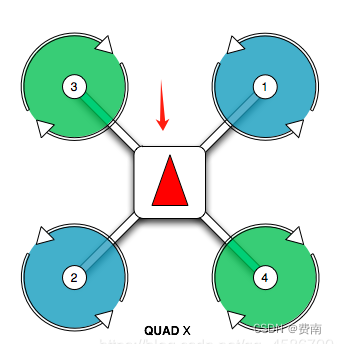
一般大家买了套装的话,1、2是银色的,3、4是黑色的(别看我下图的数字),可以在飞控上加个缓冲,完全固定在机架上,这样的好处是在飞行的时候不会因为抖动掉落和失控。

5、安装电流计,和电池,把电流计连接分电板刚刚焊接的接口,测试分电板机架上有没有通电
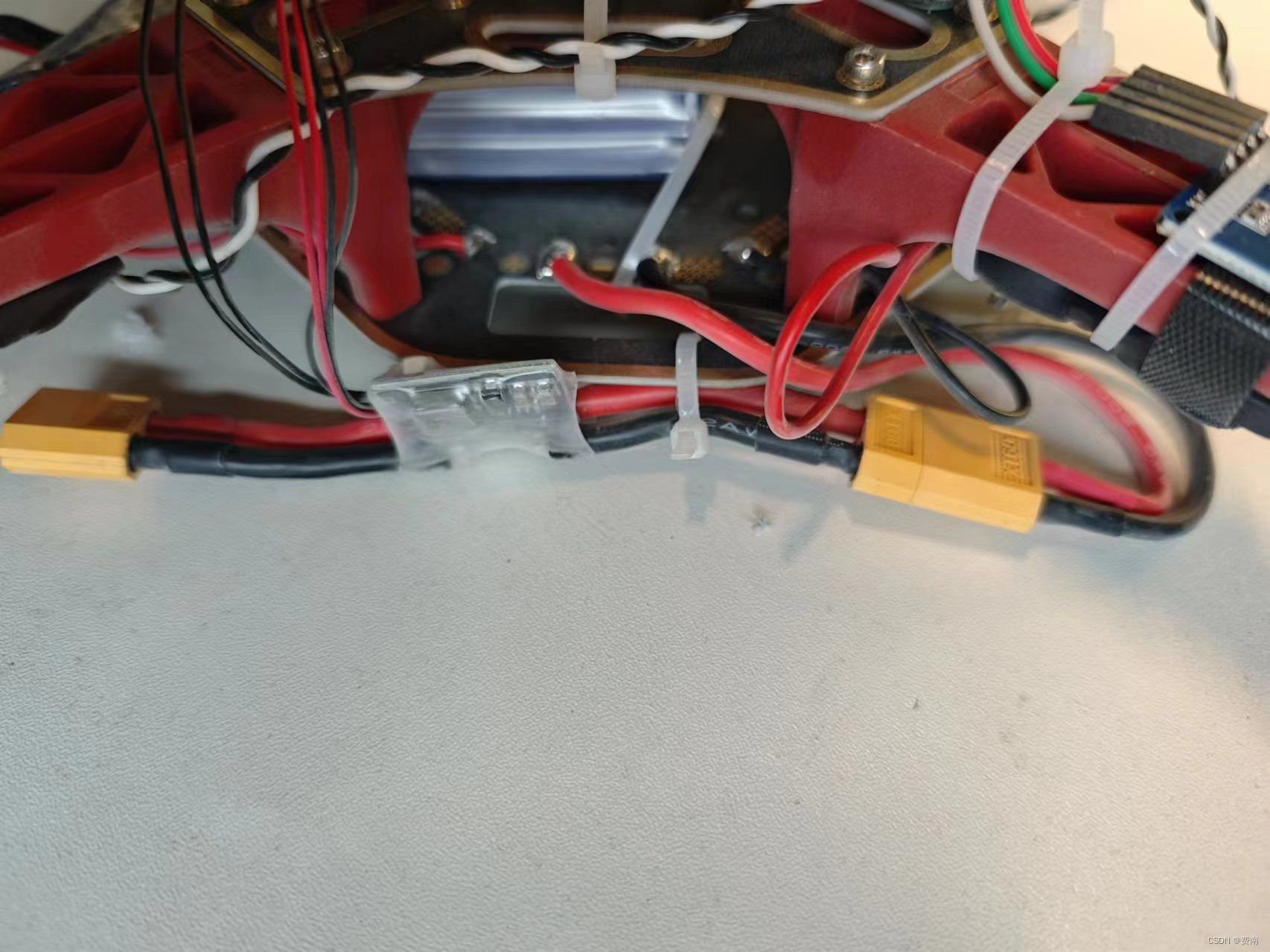
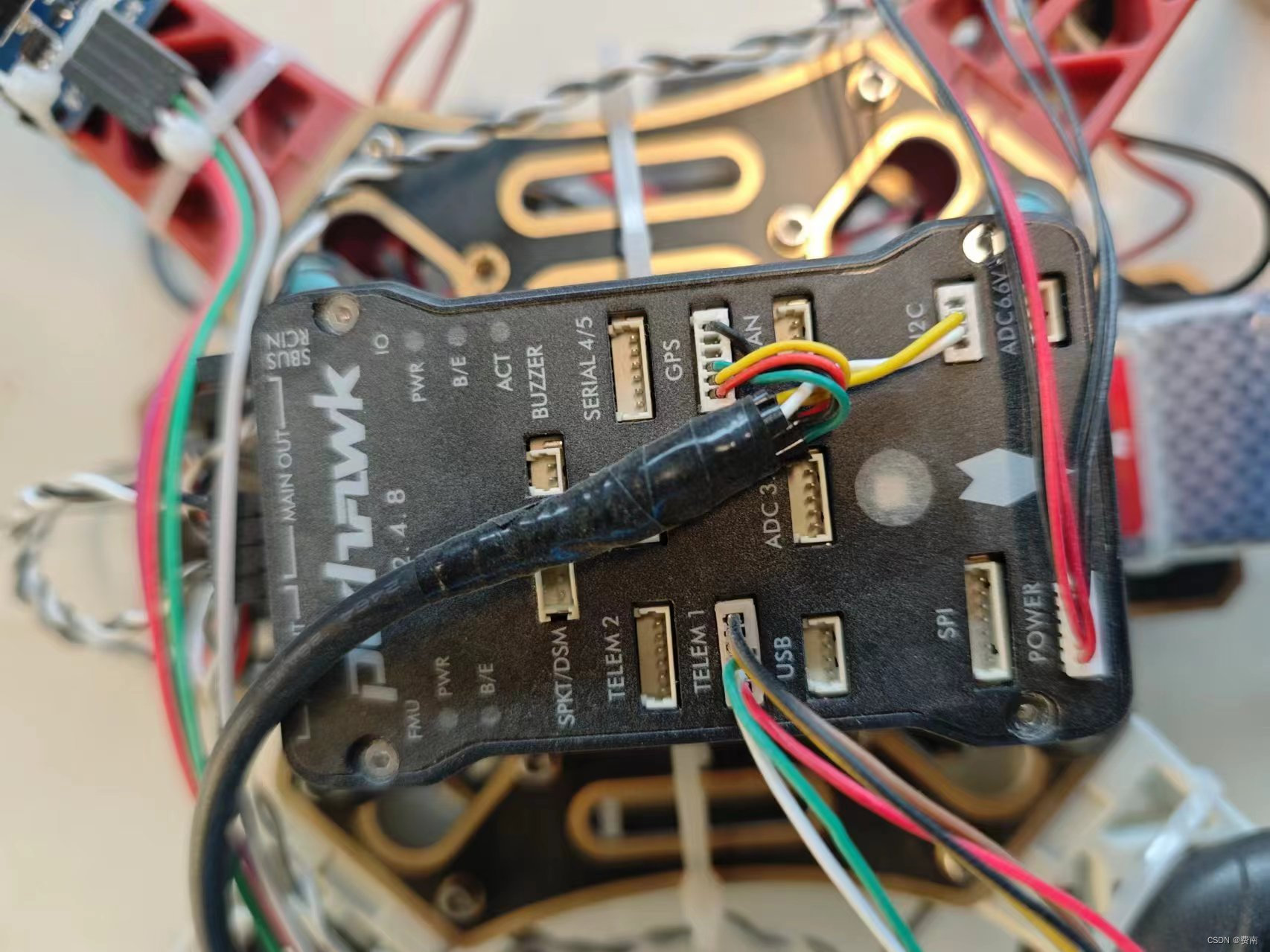
6、插上电流计的供电线给飞控,此时连接电池后,飞控也会同时供电,启动飞控

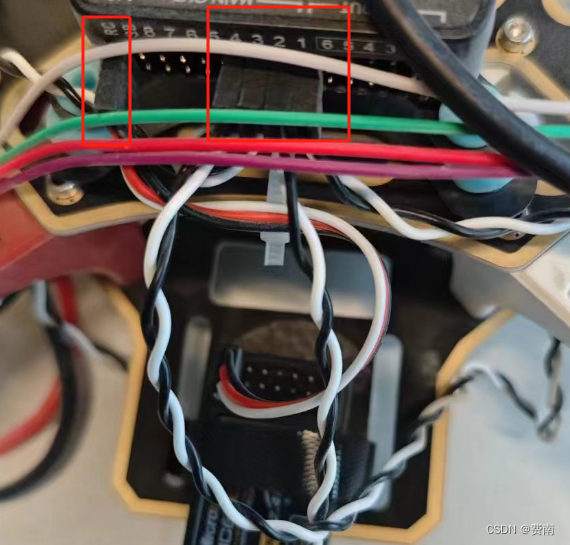
7、连接电机和电调,连接电调和飞控,如下图所示,按顺序插好就可以(图上标了号码),然后插上信号线。
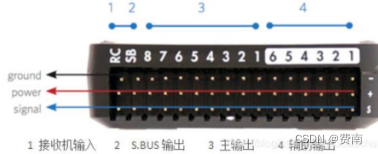
8、插上接收器,RC接口(当然要使用需要遥控器对频接收器)。
这样,就只剩下调整电机转动的方向了,这需要连接地面站之后进行测试,这样就实现了一个最简单的无人机组装。
其他:
可以选配GPS、选配数传(wifi)、图传等
需要注意的是,GPS插线在GPS接口和I2C接口,我这里装了一个ESP-01S作为wifi数传,可以插在TELEM接口上。



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









