







对自己使用过的SP70C毫米波雷达解析程序进行整理,实现对雷达探测结果的获取
SP70C毫米波雷达
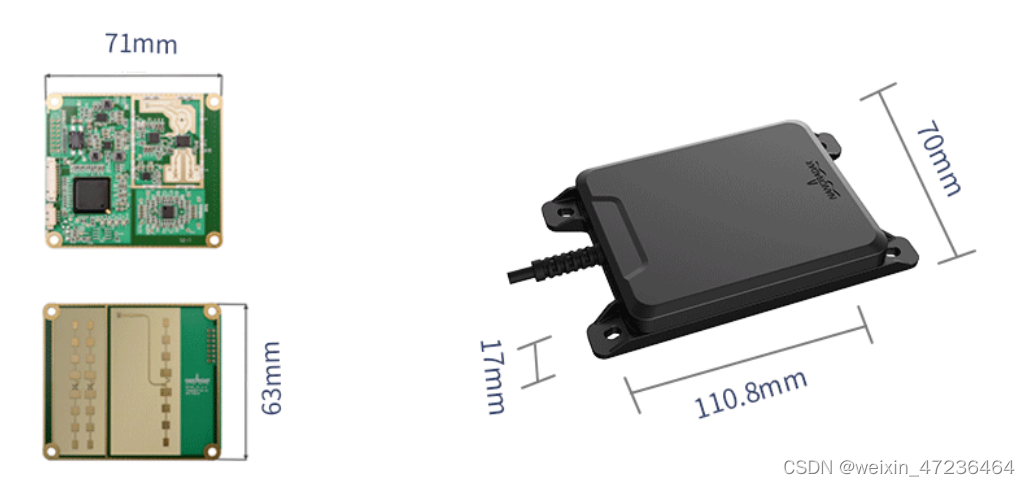
SP70C 是湖南纳雷科技有限公司研发的一款紧凑型 K 波段毫米波雷达, 采用 24GHz ISM 频段,双接收天线设计,测量距离远、体型小巧、灵敏度高、 重量轻、易于集成、性能稳定,满足工业测距与防碰撞、安防领域人员定位与 跟踪、汽车自动驾驶与主动安全等多领域应用需求,产品性能已得到众多合作 伙伴的认可。
相关参数
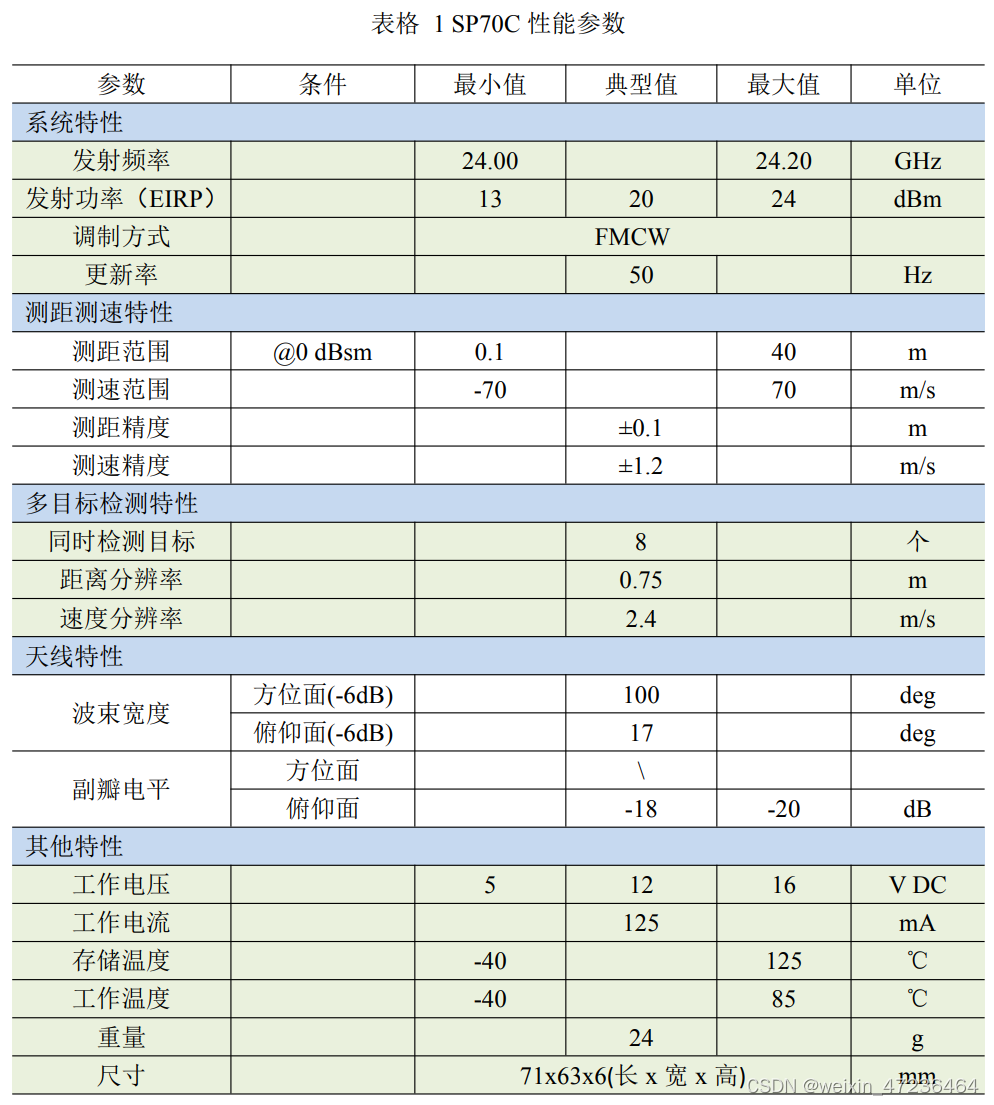
SP70C 采 用 高 集 成 度 MMIC 方 案 , 极 低 的 功 耗 (1.5W) , 较 小 尺 寸 (71x63x6mm),40m 测量距离,轻量化设计,可满足无人机、工业机械、电动车等领域的测距与防碰撞应用需求。
该款产品采用 1 路发射天线 2 路接收天线,精确测量目标的角度信息
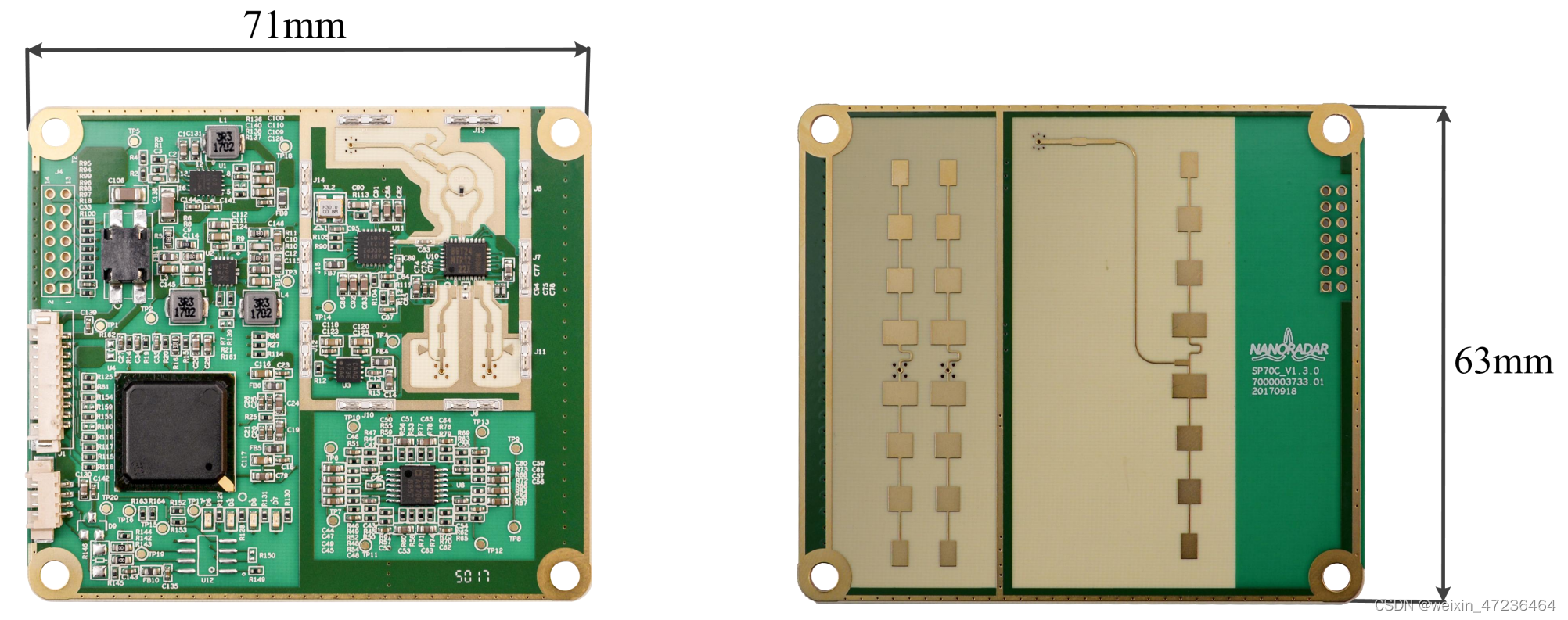
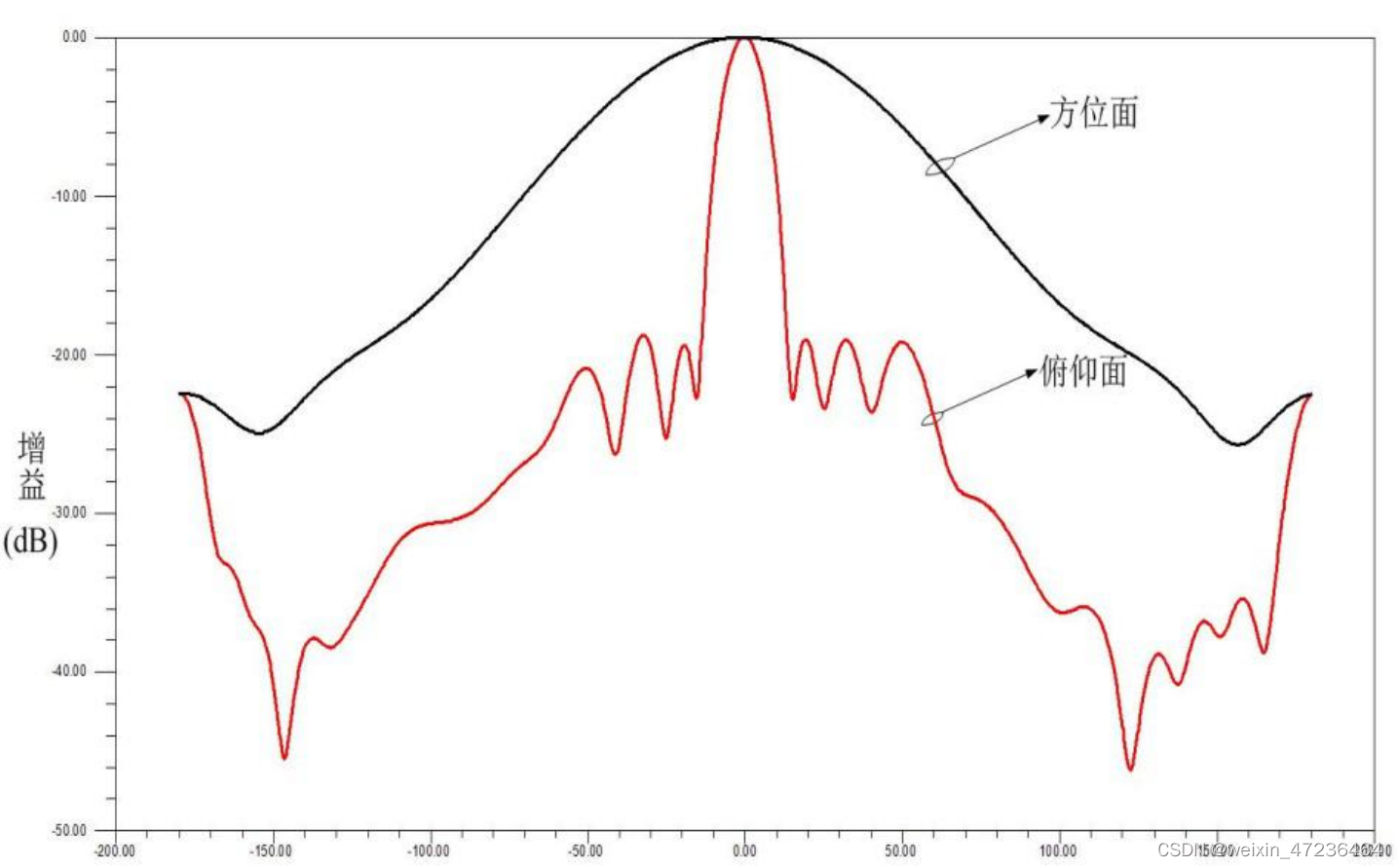
SP70C 采用集成平面微带阵列天线,包含有 8 个垂直极化辐射单元。雷达 天线在方位面为宽波束,在俯仰面为窄波束,方位面-6dB 波束宽度超过 100°, 因此 SP70C 能够在方位面上探测到 100°范围内的运动目标。俯仰面-6dB 波束 宽度为 17°,并且采用泰勒算法对方向图进行低副瓣综合,具有优于-18dB 的副 瓣抑制比。
为方便客户开发测试,SP70C 雷达提供了两种通信接口:UART 和 RS485
数据传输格式
SP70C 雷达传感器采用的是 UART-TTL 接口,使用预设的默认传输速率为 115200 波特,8 bit 数据位,1 位停止位,无奇偶校验位,无流控。每一个数据报文 以一个起始序列开始,同时以一个终止序列结束;在 SP70C 的每个数据循环周期 (20ms),都会输出 SP70C 的系统状态和目标输出状态报文,如果检测到目标即目 标输出状态报文的探测到目标个数字段为 1,目标输出状态报文后会紧接着输出目 标信息报文,目标信息报文包含目标的高度参数。
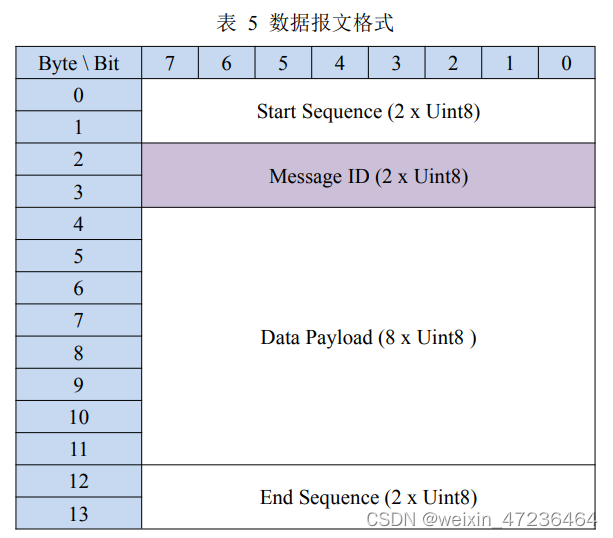
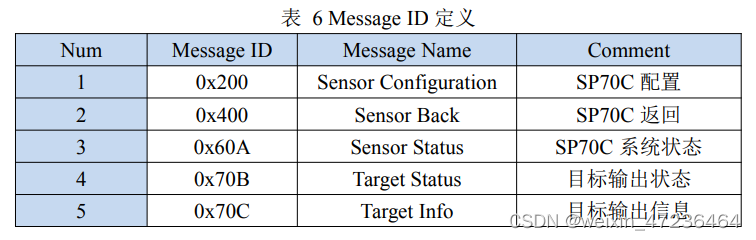
其中起始序列 Start Sequence 为定值 0xAAAA,报文 Message ID 定义如下表 所示,报文 Data Payload 根据 Message ID 定义,终止序列 End Sequence 为定值 0x5555。
数据解析
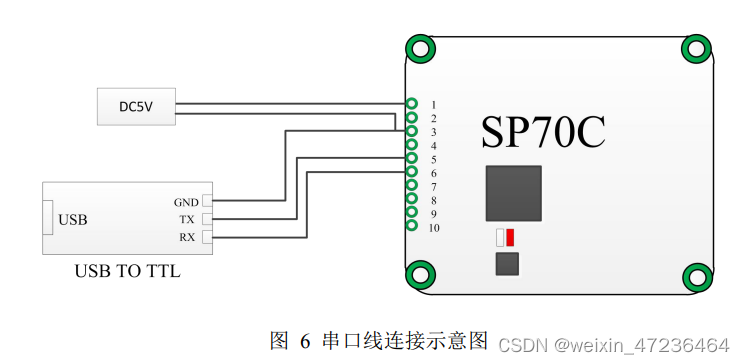
串口调试助手
借助USB-TTL转换器将数据线通过USB与电脑连接,同时,将GND与POWER IN与12V直流电源连接,具体如下
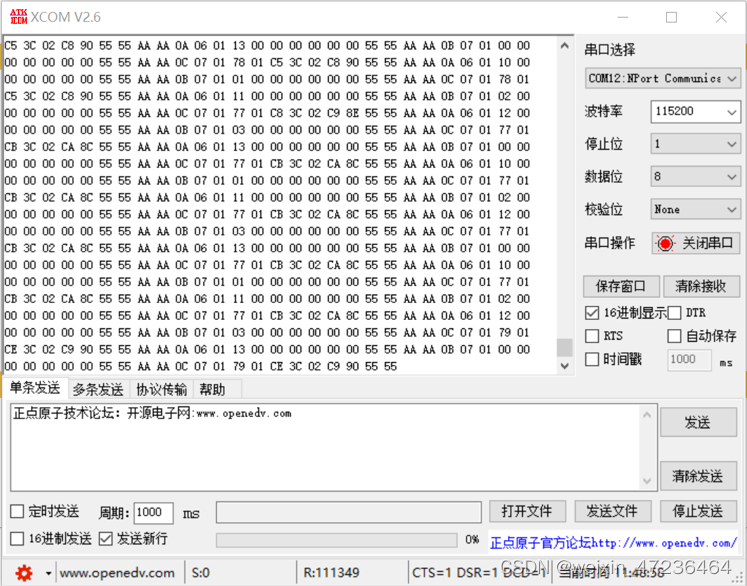
雷达上电后即开始工作,使用串口调试助手,可发现雷达发送的探测报文。其中06 0A为系统状态,说明连接无误,接口已联通; 07 0B为目标状态,07 0C为目标信息,说明可探测到目标,雷达正常工作。
解析代码
借助pyserial模块,构建串口解析代码,并封装成为单独的类,方便后续调用
import threading
import serial
import time
import logging
import struct
import queue
class sp70Comm:
def __init__(self, MsgQue):
self.msgQue = MsgQue
# 构造串口的属性
self.l_serial = None
self.thread_read = None
self.alive = False
self.waitEnd = None
# 串口号
self.port = ''
# 波特率
self.baudrate = 115200
# 校验位
self.parity = serial.PARITY_NONE
# 数据位
self.bytesize = serial.EIGHTBITS
self.ID = None
self.data = None
self.device_id = 'XX'
def set_param(self, DeviceId='XX', Port='COM3', Baudrate=115200, Parity=serial.PARITY_NONE,
Bytesize=serial.EIGHTBITS):
# 串口号
self.port = Port
# 波特率
self.baudrate = Baudrate
# 校验位
self.parity = Parity
# 数据位
self.bytesize = Bytesize
self.device_id = DeviceId
# 定义串口等待的函数
def waiting(self):
logging.debug("定义串口等待的函数")
if not self.waitEnd is None:
self.waitEnd.wait()
def SetStopEvent(self):
logging.debug("设置stop event")
if not self.waitEnd is None:
self.waitEnd.set()
self.alive = False
self.stop()
# 启动串口的函数
def start(self):
self.alive = True
try:
logging.debug("启动串口的函数")
self.l_serial = serial.Serial()
self.l_serial.port = self.port
self.l_serial.baudrate = self.baudrate
self.l_serial.parity = self.parity
self.l_serial.bytesize = self.bytesize
# 设置等待时间,若超出这停止等待
logging.debug("设置等待时间,若超出这停止等待")
self.l_serial.timeout = 2
logging.debug(
'参数--串口:' + str(self.port) + ',位/秒:' + str(self.baudrate) + ',奇偶校验:' + str(
self.parity) + ',数据位:' + str(
self.bytesize))
self.l_serial.open()
# 判断串口是否已经打开
logging.debug("判断串口是否已经打开:" + str(self.l_serial.isOpen()))
if self.l_serial.isOpen():
# 这里写自己的逻辑,我这里是开了一个线程监听串口读数据
self.waitEnd = threading.Event()
self.alive = True
self.thread_read = None
logging.debug("激活标志alive:" + str(self.alive))
self.thread_read = threading.Thread(target=self.msgParse)
self.thread_read.setDaemon(True)
self.thread_read.start()
logging.debug("线程启动。。。")
print(str(self.port) + ' open, start processing')
return True
else:
return False
except Exception as e:
logging.warning(str(self.port) + "开启异常:" + str(e))
print(str(self.port) + ' not open, ' + str(e))
return False
# 发送数据
def SendData(self, send):
# lmsg = ''
isOK = False
lmsg = send.encode('gb18030')
com_ack = ''
try:
# 发送数据到相应的处理组件
self.l_serial.write(lmsg)
_cli_ack = self.l_serial.readline()
# print('[0]', _cli_ack)
_done_ack = self.l_serial.readline()
# print('[1]', _done_ack)
com_ack = _cli_ack + _done_ack
except Exception as ex:
print(lmsg, ' failed: ', ex)
pass
return com_ack
def msgParse(self):
logging.debug(":数据监控开始。。。")
# head_word, tail_word = 0xAA, 0x55
head_word, tail_word = bytes.fromhex('AA'), bytes.fromhex('55')
package_length = 14
bytes_data = bytes()
msg_cnt = 0
try:
while self.alive:
n = self.l_serial.inWaiting() # 获取接收到的数据长度
# if n == 0:
# # time.sleep(0.001)
# continue
logging.debug(f'reading {n} bytes')
# print(f'reading {n} bytes')
bytes_data = bytes_data + self.l_serial.read(n)
ready_flag = False
logging.debug(f'begin header seeking, bytes len {len(bytes_data)}')
# print(f'begin header seeking, bytes len {len(bytes_data)}')
while len(bytes_data) > package_length:
raw_word = struct.unpack('14c', bytes_data[:package_length])
if (raw_word[0] != head_word) and \
(raw_word[1] != head_word) and \
(raw_word[-1] != tail_word) and \
(raw_word[-2] != tail_word):
# wrong head word, increment pointer by 1 and try again
bytes_data = bytes_data[1:]
continue
else:
# got correct word, proceed to parse
msg_cnt += 1
# logging.warning(f'header found, before bytes len {len(bytes_data)}, frameId {msg_cnt}')
bytes_data = bytes_data[package_length:]
if len(bytes_data) > 10 * package_length:
logging.warning(f'msg remain unprocessed {len(bytes_data) / package_length}')
# logging.warning(f'header found, remain bytes len {len(bytes_data)}, frameId {msg_cnt}')
msg_str = raw_word[2:-2]
msg_tag, msg_info = extract_msg(msg_str)
if msg_tag == 'target info':
msg_pack = {'tag': gdf.TAG_SP70,
'mid': self.device_id,
'time': time.time(),
'payload': [msg_info['index'], msg_info['rcs'], msg_info['range'],
msg_info['azimuth'], msg_info['vrel'], msg_info['roll_count'],
msg_info['snr']]}
self.msgQue.put(msg_pack)
# print(f'{self.device_id} info {msg_info}')
# print(f'header found, bytes len {len(bytes_data)}, frameId {frameId} tlvNum {numTLVs} packetLength {packetLength}')
break
# QApplication.processEvents()
except Exception as e:
logging.warning('获取com数据异常2:' + str(e))
print(str(self.port) + ' parse error: ' + str(e))
self.waitEnd.set()
self.alive = False
def stop(self):
try:
self.alive = False
self.data = None
if self.thread_read is not None:
self.thread_read.join()
logging.debug(str(self.thread_read.ident) + '线程关闭。。。')
print(str(self.thread_read.ident) + ' thread terminated')
if self.l_serial is not None and self.l_serial.isOpen():
self.l_serial.close()
logging.debug(str(self.l_serial.port) + '串口关闭。。。')
print(str(self.l_serial.port) + ' port closed')
except Exception as e:
logging.warning('关闭' + str(self.port) + '线程失败:' + str(e))
print(str(self.port) + 'close failed: ' + str(e))
经过封装后,便可在主函数中指定对应的端口号,直接调用。
if __name__ == '__main__':
logging.basicConfig(level=logging.WARN)
msg_queue = queue.Queue(maxsize=2000)
sp70_t1 = sp70Comm(MsgQue=msg_queue) # sp70c #1
sp70_t1.set_param(DeviceId='001', Port='COM12') # sp70c #1
sp70_t1.start()
测试结果
使用SP70C观察公路上行驶的车辆,将得到的探测结果以散点图的形式作图。
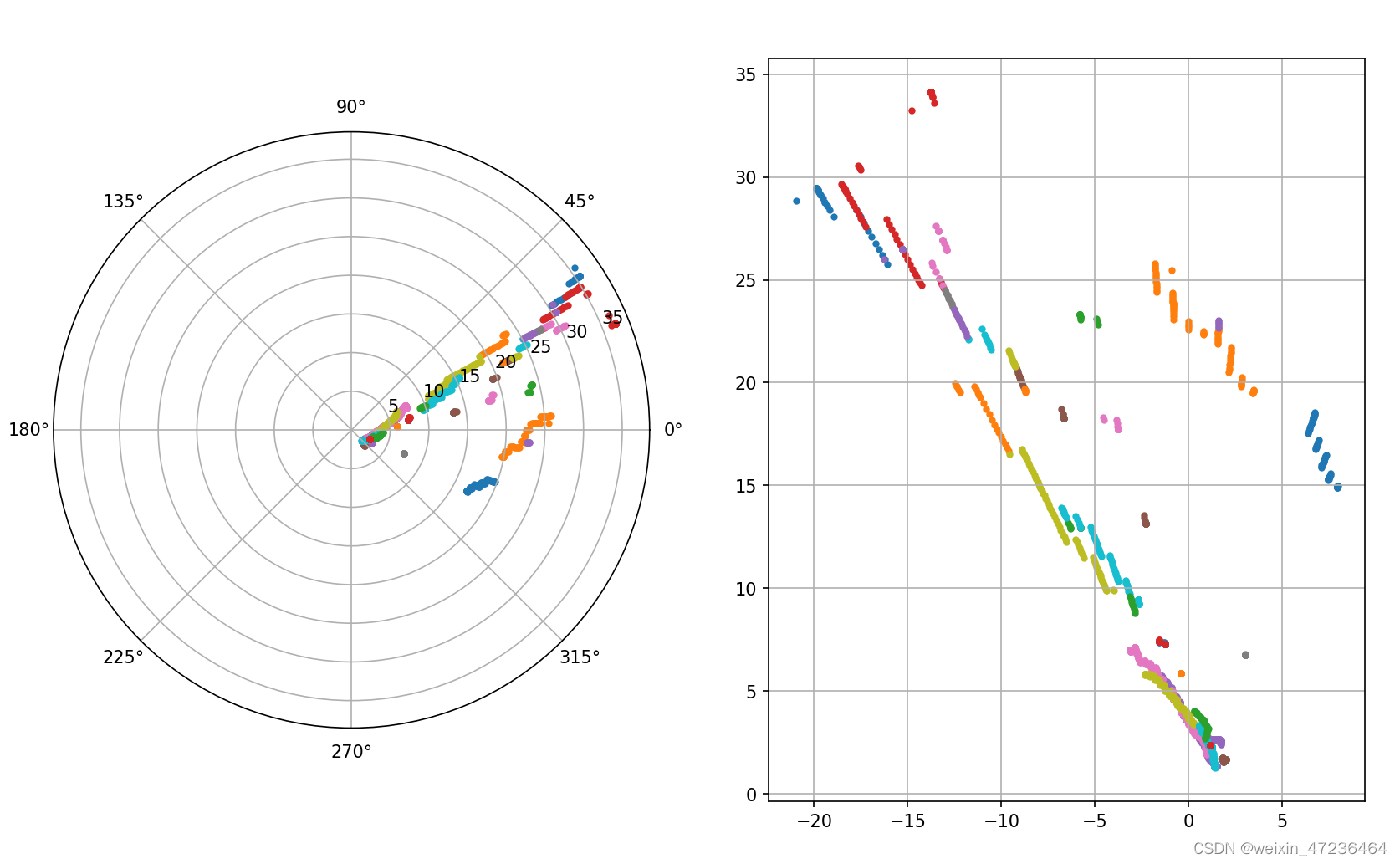
从图中可看到近雷达侧的路面,车辆探测比较连续,散点反映了车辆直线行驶的轨迹。而在对侧车道上行驶的车辆,由于遮挡及信噪比原因,探测结果较为分散。














 736
736











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









